Изобретение относится к лесной промышленности.
Цель изобретения сострит в повышении точности регулирования процесса пиления за счет повышения эффективности процесса в широком диапазоне изменения динамических нагрузок как в области быстро изменяющихся, так и плавно меняющихся значений, путем отслеживания текущего значения сопротивления резанию.
Поставленная цель достигается тем, что в способ регулирования скорости надвигания пилы при распиловке лесоматериалов, включающий формирование сигнала, пропорционального величине тока в одной из фаз питания электродвигателя привода пилы и регулирование по результатам сравнения этой величины скорости надвигания, введена операция сравнения сформированного сигнала на нелинейном элементе с характеристикой, порог срабатывания которой изменяют по периодическому линейно-нарастающему закону, формируя отрезок времени от начала появления линейно-нарастающего напряжения до момента срабатывания нелинейного элемента, после чего отрезок времени заполняют импульсами опорной частоты, а скорость надвигания корректируют пропорционально числу импульсов заполнения в каждом интервале времени.
Указанная цель достигается также и тем, что в устройство для регулирования скорости подачи пилы при распиловке лесоматериалов, содержащее электродвигатель пилы, трансформатор тока для включения в фазу питания электродвигателя привода пилы, резистор нагрузки трансформатора, введен регенеративный оптрон, к элементу подсветки которого подключен дополнительный генератор линейно-нарастающего напряжения, а последовательная цепь регенеративного оптрона подключена к вторичной обмотке трансформатора тока и имеет
w
Ё
00
со
Ј
NO
СА
выход, который через дифференцирующую цепь подключен к входу S триггера, к входу R которого подключена схема запуска, выход триггера подключен к первому входу схемы И, к второму входу которой подключен выход генератора импульсов опорной частоты, выход схемы И подключен к счетному входу счетчика, к сбросовой шине которого подключен выход схемы запуска, выход счетчика подключен к цифровому манипулятору управления приводом надвигания, схема запуска подключена к электронному ключу в цепи питания оптро- на и шине пуска генератора линейно-нарастающего напряжения.
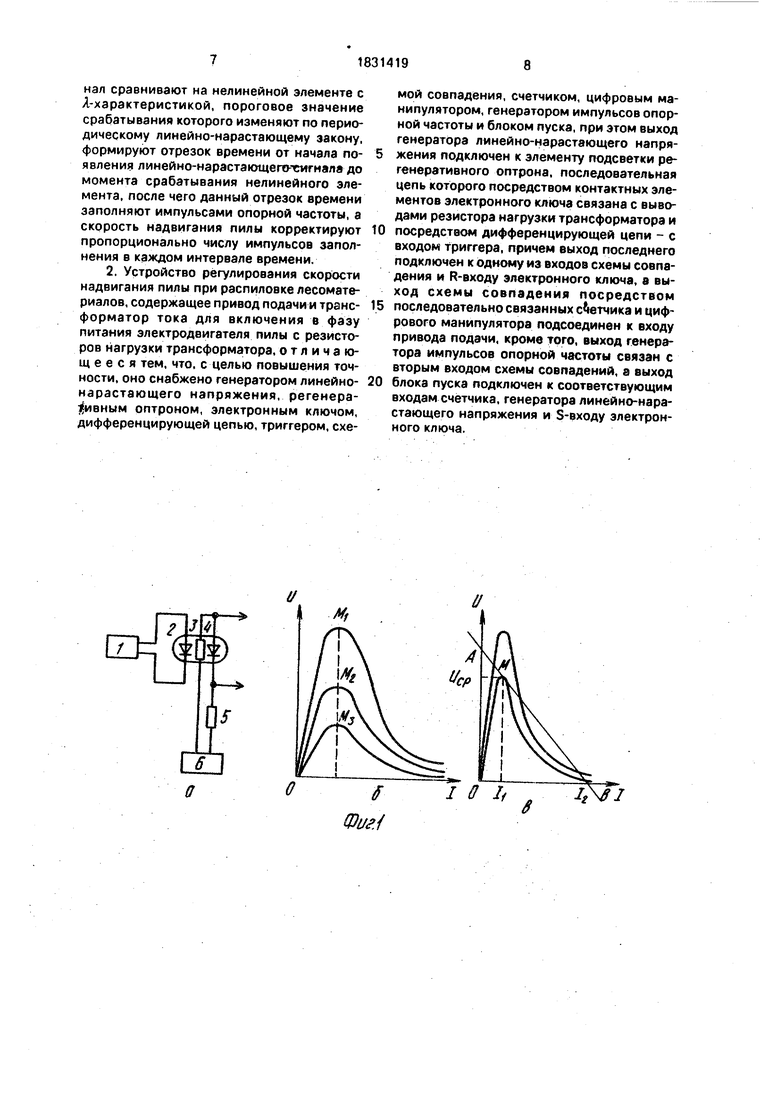
На фиг. 1а приведена схема регенеративного рптрона, содержащая регулируемый источник 1 напряжения элемента подсветки 2 оптрона, фоторезистор 3, элемент 4 положительной оптической обратной связи, сопротивление нагрузки регенеративного оптрона 5. источник питания в цепи регенеративного оптрона. Известно, чтооп- трон с положительной оптической обратной связью имеет вольт-амперную характеристику с ярко выраженным падающим участком, определяющим отрицательное динамическое сопротивление. Если задавать постоянные значения напряжения источника 1 питания элемента подсветки 2 и снимать для этих значений вольт-амперную характеристику последовательной цепи регенеративного оптрона 3, 4 и 5, путем изменения напряжения источника питания 6, то получим семейство вольт-амперных характеристик с тенденцией смещения точки максимума вольт-амперной характеристики вниз по мере увеличения напряжения на элементе подсветки (фиг. 16). Пусть напряжение питания цепи регенеративного оптрона постоянно (определяется током нагрузки электродвигателя привода пилы) и постоянно сопротивление нагрузки 5, тогда вольт-амперная характеристика линии нагрузки будет занимать положение АВ (фиг. 1в). При подаче на вход подсветки пилообразного напряжения точка максимума вольт-амперной характеристики регенеративного оптрона начинает смещаться вниз и в момент ее касания с линией нагрузки произойдет срабатывание оптрон.э, при котором ток броском возрастет от значения И до значения 12 (фиг. 1 в, точка Mi) и оптрон займет устойчивое положение, а момент времени, при котором произойдет бросок тока, а следовательно, и бросок напряжения на сопротивление нагрузки 5, можно использовать для фиксации интервала време- ни от начала формирования линейно-нарастающего напряжения до срабатывания оптрона. Дальнейшее изменение оптического излучения элементаподс- ветки 2 не выведет оптрон из устойчивого положения вследствие достаточности подсветки фоторезистора 3 элементом оптической обратной связи 4. Поэтому для приведения схемы в исходное состояние необходимо отключить источник питания б от последовательной цепи регенеративного
0 оптрона. С увеличение напряжения питания источника 6 линия нагрузки смещается вверх, а это соответствует значительно меньшему напряжению на элементе подсветки 2 для срабатывания оптрона, т.е. вре5 мя линейного нарастания напряжения на элементе подсветки с ростом напряжения питания последовательной цепи регенеративного оптрона уменьшается, Таким образом, в зависимости от тока нагрузки
0 электродвигателя пилы, которым определяется напряжение питания последовательной цепи регенеративного оптрона от момента формирования пилообразного напряжения элемента подсветки 2 до срабаты5 вания последовательной цепи регенеративного оптрона, что фиксируется броском напряжения на сопротивлении нагрузки 5. Заполняя этот интервал времени, пропорциональный сопротивлению реза0 ния, импульсами опорной частоты, количество которых в данном интервале определится сопротивлением резания, и считывая это количество импульсов, а затем подавая их на цифровой манипулятор мож5 но реализовывать управление скоростью . надвигания привода пилы.
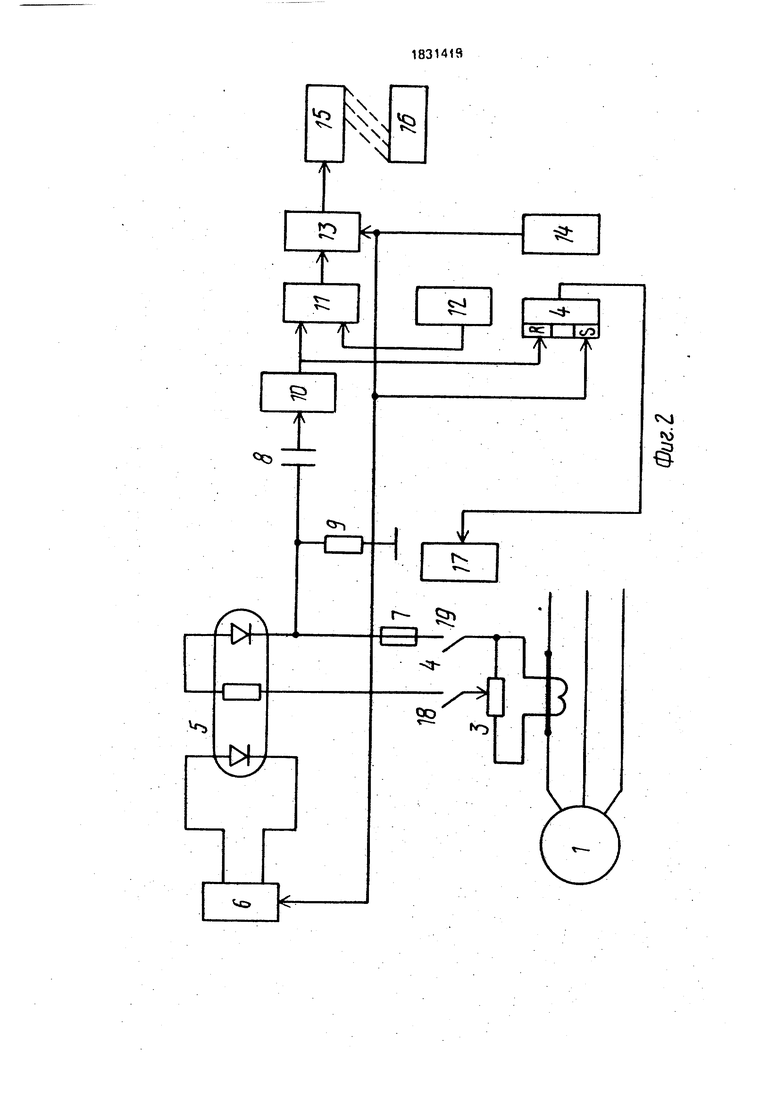
На фиг. 2 приведена блок-схема устройства по описанному способу.
Устройство регулирования скорости на0 двигания пилы при распиловке лесоматериалов содержит электродвигатель 1 привода пилы, трансформатор тока 2, первичная обмотка которого включена в фазу питания электродвигателя 1 привода пилы, а его вто5 ричная обмотка подключена к потенциометру 3, скользящий контакт которого и общая ширина через электронный ключ 4 подключены к цепи питания оптрона 5, его элемент подсветки подключен к генератору линей0 но-нарастающего напряжения 6, в последо- вательную цепь оптрона 5 включено сопротивление нагрузки, выходе которого через дифференцирующую цепь 8 (и 9) подключен к входу триггера 10, выход триггера
5 подключен к первому входу схемы 11 совпадения, а к ее второму входу подключен выход генератора 12 импульсов опорной частоты, выход схемы совпадения подключен к счетному входу счетчика 13, его сбросовая шина подключена к блоку 14 пуска, а
выход счетчика подключен к входу управления цифрового манипулятора 15, который непосредственно воздействует на электрический или гидравлический привод 16 подачи лесоматериалов, изменяя его скорость надвигания, герконное реле 17 и его контакты 18 и 19.
Устройство работает следующим образом.
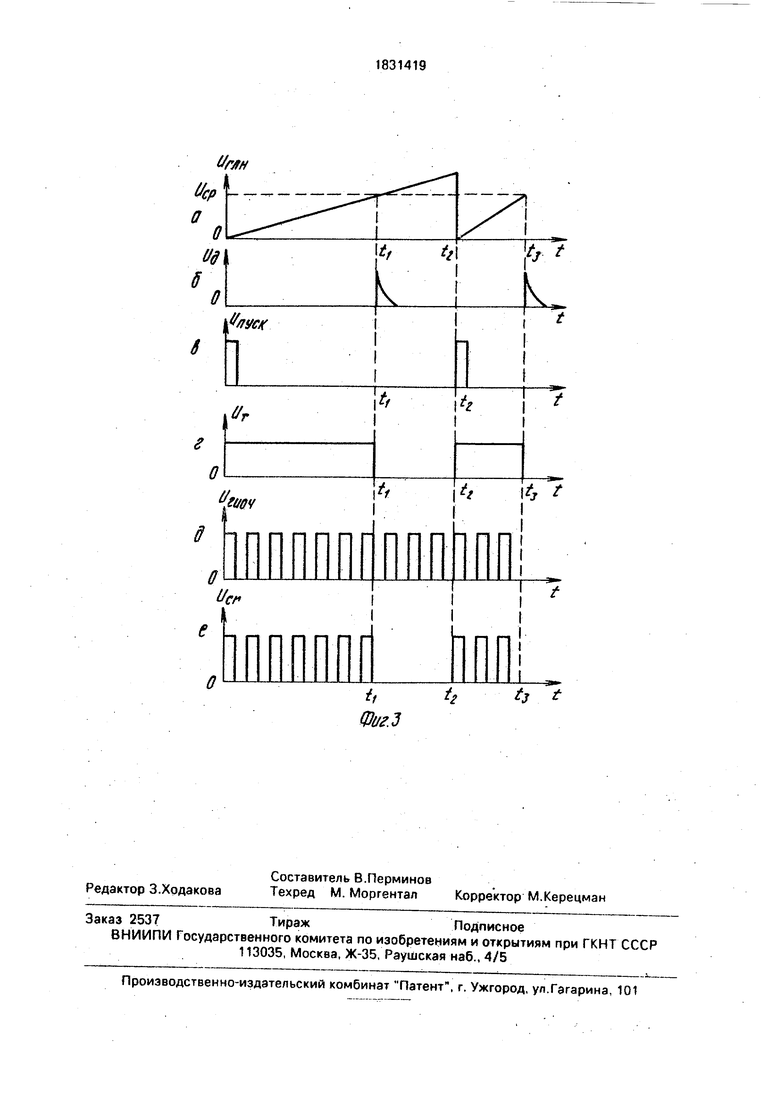
Первоначально с помощью потенциометра 3 устанавливается напряжение питания регенеративной цгпи оптрона 5, соответствующее тому или иному режиму пиления с предварительным учетом сопротивления резанию лесоматериалов. Затем нажимают кнопку запуска или включают автоматический запуск блока запуска 14, в результате чего импульсом запуска производится запуск генератора 6 линейно-нарастающего напряжения и начинается формирование линейно-нарастающего напряжения (фиг. За), которое приложено к элементу подсветки оптрона 5. Одновременно блок запуска 14 пусковым импульсом устанавливает триггер 10 в исходное состояние, в результате чего на его выходе формируется выходной импульс (эпюра, фиг. Зг), обнуляет счетчик 13, открывает электронный ключ 4, тем самым подавая напряжение питания с вторичной обмотки трансформатора 2 тока, пропорциональное току нагрузки электродвигателя 1 привода пилы, а следовательно, и пропорциональное сопротивлению резанию, к последовательной цепи регенеративного оптрона 5. С ростом лнейно-нарастающего напряжения на элементе подсветки оптрона 5 происходит смещение точки максимума М вольт-амперной характеристики регенеративной цепи вниз (фиг. 16) и при достижении точки сопряжения Mi (фиг, 1в) происходит срабатывание оптрона (напряжение срабатывания UCp на фиг. 1 в), при котором ток броском возрастает от значения И до значения 12. На эпюре напряжений (фиг. За) этому значению соответствует момент времени t. Бросок тока в последовательной цепи оптрона 5 приведет к броску напряжения на его сопротивлении нагрузки 7, который дифференцируется цепью 8 и 9 и в виде дифим- пульса (фиг. 36) поступает на вход R триггера 10, что приводит к опрокидыванию триггера 10 и запиранию схемы совпадения 11. Таким образом, от момента запуска t О до момента t срабатывания регенеративного оптрона 5 на выходе триггера 1 будет сформирован разрешающий импульс (фиг. Зг), который открывает на этот период времени О-t схему совпадения 11. На второй вход схемы совпадения 11 поступают импульсы генератора 12 опорной частоты (фиг. Зд), а на ее выходе формируются пакеты импульсов опорной частоты при разрешающем импульсе на выходе триггера 10, т.е. в 5 момент времени от 0 до t, которые поступают на счетчик 13, считываются им и информация с счетчика в виде двоичного параллельного кода поступает на цифровой манипулятор 15. который непосредственно
0 реализует цифровое управление приводом надвигания. При срабатывании триггера 10 по входу R от дифимпульса, сформированного при броске напряжения на сопротивлении 7 нагрузки оптрона 5, запирается
5 электронный ключ 4 и последовательная цепь регенеративного оптрона 5 обеспечивается, т.е. устройство подготавливается к следующему циклу, который начинается с подачей пусковбго импульса в момент вре0 мени t2. Число импульсов опорной частоты, сформированное в пакете (фиг. Зе), служит для управления скоростью надвигания и определяется напряжением вторичной обмотки трансформатора 2 тока, которое
5 однозначно определяется сопротивлением резанию. Действительно, с увеличением сопротивления резанию возрастает ток нагрузки электродвигателя 1, увеличивается напряжение вторичной обмотки трансфор0 матора тока 2, что приведет к смещению линии нагрузки регенеративного оптрона АВ (фиг. 1в) и определит точку сопряжения с вольт-амперной характеристикой оптрона при меньших значениях напряжения под5 светки, т.е. увеличение сопротивления резанию уменьшает уровень напряжения срабатывания линейно-нарастающего напряжения, уменьшает интервал времени разрешающего импульса на выходе тригге0. ра 10 и уменьшает число импульсов, сформированных в пакете управления.
Устройство, реализованное по предлагаемому способу, позволяет .очень высоко поднять точность управления процессом
5 пиления, а преобразование измеренной информации в цифровой код позволяет включить устройство в общую систему АСУ ТП, что определяет дальнейший уровень развития технологии.
0 Формула изобретения
1. Способ регулирования скорости надвигания пилы при распиловке лесоматериалов, включающий формирование сигнала, пропорционального величине тока в одной
5 из фаз питания электродвигателя привода пилы, и регулирование, по результатам сравнения этой величины с заданным пороговым значением, скорости надвигания пилы, отличающийся тем, что, с целью повышения точности, сформированный сигнал сравнивают на нелинейной элементе с А-характеристикой, пороговое значение срабатывания которого изменяют по периодическому линейно-нарастающему закону, формируют отрезок времени от начала появления линейно-нарастающепго1гнала до момента срабатывания нелинейного элемента, после чего данный отрезок времени заполняют импульсами опорной частоты, а скорость надвигания пилы корректируют пропорционально числу импульсов заполнения в каждом интервале времени,
2. Устройство регулирования скорости надвигания пилы при распиловке лесоматериалов, содержащее привод подачи и трансформатор тока для включения в фазу питания электродвигателя пилы с резисторов нагрузки трансформатора, отличающееся тем, что, с целью повышения точности, оно снабжено генератором линейно- нарастающего напряжения, регенера- 1 ивным оптроном, электронным ключом, дифференцирующей цепью, триггером, схемой совпадения, счетчиком, цифровым манипулятором, генератором импульсов опорной частоты и блоком пуска, при этом выход генератора линейно-нарастающего напряжения подключен к элементу подсветки регенеративного оптрона, последовательная цепь которого посредством контактных элементов электронного ключа связана с выводами резистора нагрузки трансформатора и
посредством дифференцирующей цепи - с входом триггера, причем выход последнего подключен к одному из входов схемы совпадения и R-входу электронного ключа, а выход схемы совпадения посредством
последовательно связанных счетчика и цифрового манипулятора подсоединен к входу привода подачи, кроме того, выход генератора импульсов опорной частоты связан с вторым входом схемы совпадений, а выход
блока пуска подключен к соответствующим входам счетчика, генератора линейно-нарастающего напряжения и S-входу электронного ключа.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ регулирования скорости надвигания пилы при распиловке лесоматериалов и устройство для его осуществления | 1990 |
|
SU1794009A3 |
| Способ измерения сопротивления и устройство для его осуществления | 1990 |
|
SU1789940A1 |
| Устройство для контроля асинхронных электродвигателей | 1990 |
|
SU1742653A1 |
| Устройство для измерения крутящего момента на валу асинхронного электродвигателя | 1991 |
|
SU1794243A3 |
| Устройство для измерения крутящего момента на валу асинхронного электродвигателя | 1990 |
|
SU1747963A1 |
| Сигнализатор крутящего момента на валу асинхронного электродвигателя | 1987 |
|
SU1500876A2 |
| Способ измерения сопротивления и устройство для его осуществления | 1990 |
|
SU1748088A1 |
| Способ определения температуры и устройство для его осуществления | 1988 |
|
SU1613880A1 |
| Устройство для измерения крутящего момента на валу асинхронного электродвигателя | 1987 |
|
SU1580187A1 |
| Срезающее устройство лесозаготовительной машины | 1987 |
|
SU1512525A1 |
Использование: лесная промышленность, в частности распиловка древесины/Сущность изобретения: посредством нелинейного элемента - регенеративного оптрона, формируют отрезок времени, который характеризует предельный режим пиления. После этого заполняют импульсами опорной частоты этот отрезок времени. Количество импульсов, содержащихся в каждом отрезке, подсчитывают и это число используют для коррекции надвигания пилы. 2 с.п. ф-лы, 3 ил.
/,V/
УГЛН
t/
tffffY
О
nnnnilnnnlinii
inoonnd Ш
ь
Фм.З
Ь .
| Авторское свидетельство СССР fxfe 1683377, кл | |||
| Прибор с двумя призмами | 1917 |
|
SU27A1 |
