Изобретение относится к лесной промышленности. : .
Известен способ регулирования скорости надвигания пилы при поперечной распиловке лесоматериалов, заключающийся в автоматическом вводе поправки на поперечный размер, например, бревен, измере-- нии удельного сопротивления резания и корректирование скорости надвигания по величине отклонения удельного сопротивления резанию от его значения в предыдущем случае. ;
Недостатком известного способа является отсутствие возможности управления в динамике, сложность его аппаратной реализации, а также сложность эксплуатации оборудования в связи с большим числом операций настройки, что затрудняет работу оператора, снижает производительность .процесса..
Известен способ регулирования скорости надвигания пилы при поперечной распиловке лесоматериалов и устройство для его осуществления, включающее формирование первого сигнала, пропорционального величине тока в одной из фаз питания электродвигателя привода дисковой пилы, и регулированиечисла оборотов электродвигателя привода подачи лесоматериала, формирование второго сигнала, пропорционального величине тока в другой фазе питания электродвигателя привода дисковой пилы, после чего оба сигнала подают на инерционные цепи с разными постоянными времени и между соответствующими выходными сигналами формируют разностный сигнал, по величине которого корректируют число оборотов электродвигателя привода подачи лесоматериала.
Способ реализует регулирование по производной и позволяет оптимизировать процесс пиления при резких динамических нагрузках. Однако, когда нагрузка нарастает плавно, т.е. длительность фронта формирования нагрузки, обусловленная ростом тока нагрузки электродвигателя привода велика, то выходной сигнал, который пропорционален производной фронта изменения.
XI
О Јь О О
ю
CJ
может оказаться равным нулю, что может привести к выходу электродвигателя из строя. Таким образом, существенным недостатком рассмотренного способа и устройства, является исключение процесса регулирования при плавных изменениях тока нагрузки электродвигателя, что существенно снижает надежность устройств, реализованных по данному способу. Кроме того, устройство сложно в эксплуатации в связи с большим числом настроек.;
Цель изобретения - повышение эффективности процесса пиления путем увеличения точности и надежности регулирования скорости надвигания пилы при быстро меняющихся и плавно изменяющихся нагрузках; . . . л. . . ;-.
Поставленная цель достигается тем, что в способ регулирования скорости надвигания пилы при распиловке лесоматериалов, включающем формирование сигнала, пропорционального величине тока в одной из фаз питания электродвигателя привода пилы, операцию сравнения этого сигнала и регулирование числа оборотов электродвигателя привода подачи, введена операция сравнения сформированного сигнала с заданной на нелинейном элементе с R-харак- теристикой и при превышении заданного значения напряжения увеличивают нагрузи ку данного нелинейного элемента и уменьшают напряжение питания обмотки возбуждения электродвигателя привода подачи, в противном случае уменьшают нагрузку нелинейного элемента и одновременно увеличивают напряжение питания обмотки возбуждения электродвигателя привода подачи,
Указанная цель достигается также и тем, что в устройство для регулирования скорости подачи пилы, содержащее трансформатор тока для включения в фазу питания электродвигателя привода дисковой пилы, резистор нагрузки трансформатора введен регенеративный оптрон, последовательная цепь которого с переменным сопротивлением: нагрузки через надстроечный резистор подключены к вторичной обмотке трансформатора тока, элемент подсветки оптррна подключен к регулируемому источнику опорного напряжения уставок, выход регенеративного оптрона подключен через дифференцирующую цепь к электронному ключу в цепи управления микродвигателя, который кинематически связан со скользящим контактом переменного сопротивления нагрузки регенеративного Оптрона и скользящим контактом потенциометра обмотки возбуждения двигателя привода подачи лесоматериала, а также с контактными
группами задания ширины зоны регулирования.
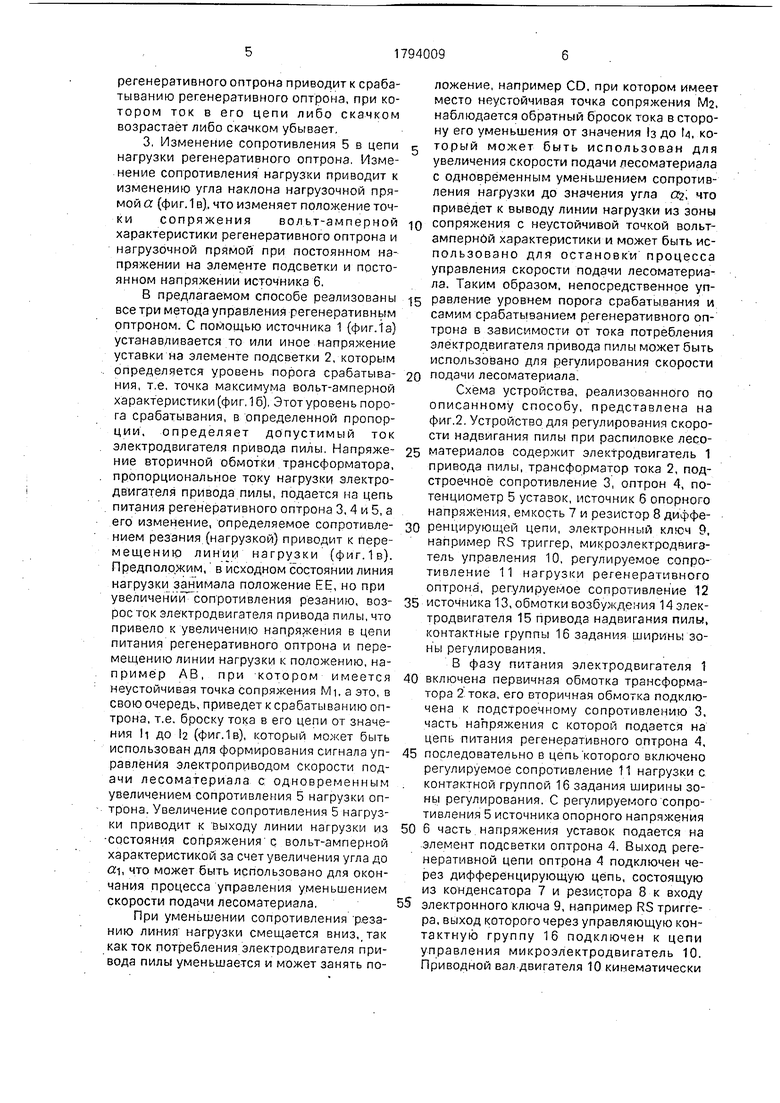
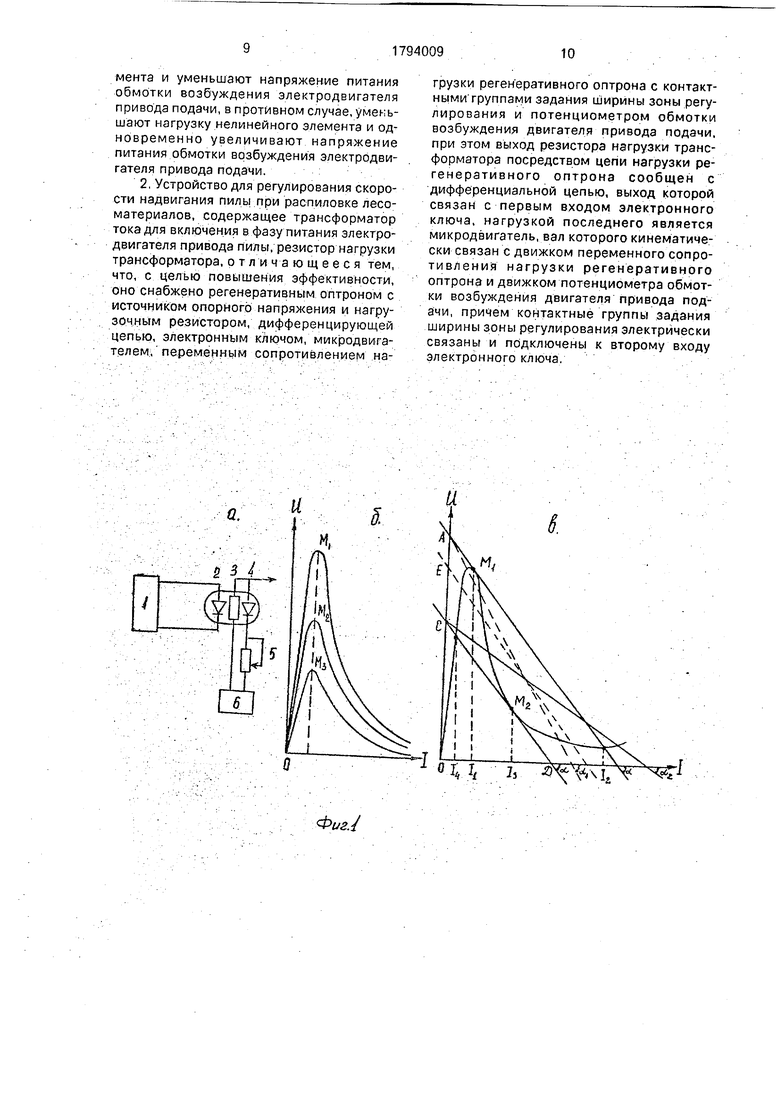
Изобретение иллюстрируется следуюг щими примерами. На фиг.Та приведена схема регенеративного оптрона, содержащая регулируемый источник 1 напряжения элемента подсветки (источник уставок), элемент подсветки оптрона 2, фоторезйстор 3, элемент 4 излучения положительной оптической обратной связи, переменное сопротивление нагрузки 5, источник питания 6 цепи регенеративного оптрона. Известно, что оптрон с положительной оптической об ратной связью имеет вольт-амперную характеристику с ярко выраженным падающим участком, определяющим отрицательное динамическое сопротивление (3,4). Срабатывание оптрона, т.е. его опрокидывание в неустойчивых точках вольт-амперной характеристики определяется тремя факторами.
1. Изменением напряжения на элементе подсветки. В этом случае происходит.сме- щение точки максимума вольт-амперной
характеристики, определяющей уровень порога срабатывания оптрона. Вольт-ампер ные характеристики, приведенные на фиг. 16; определяются различным напряжением на элементе подсветки, при этом чем
больше уровень этого напряжения, тем ниже уровень срабатывания оптрона. Точка Mi определяет минимальный уровень напряжения элемента подсветки, а точка Мз - максимальный. Таким образом, задавая то
или иное напряжение на элементе 2 подсветки с помощью источника уставок 1, можно задавать тот или иной уровень порога срабатывания регенеративного оптрона.
2. Изменением напряжения питания ис- точника 6 последовательной цепи регенеративного оптрона. В этом случае линия нагрузки, обусловленная постоянным значением сопротивления 5, смещается паралг лельно самой себе под углом а , величина которого определяется сопротивлением нагрузки 5. При этом, чем больше напряжение на элементе подсветки нужно иметь, чтобы получить точку сопряжения Mr, определяю- .щую опрокидывание оптрона для данного сопротивления нагрузки, при котором ток скачком возрастает от значения h до значения h (фиг, 1 в). Уменьшение напряжения источника 6 приводит к снижению уровня линии нагрузки и при достижении положе- ния CD, когда происходит сопряжение ли-- нии нагрузки со второй неустойчивой точки Ма происходит обратное срабатывание оптрона, при котором ток скачком уменьшается от значения з до значения Ц. Таким образом, изменение напряжения питания цепи
регенеративного оптрона приводит к срабатыванию регенеративного оптрона, при котором ток в его цепи либо скачком возрастает либо скачком убывает,
3, Изменение сопротивления 5 в цепи нагрузки регенеративного оптрона. Изменение сопротивления нагрузки приводит к изменению угла наклона нагрузочной прямой а (фиг. 1 в), что изменяет положение точ- ки сопряжения вольт-амперной характеристики регенеративного оптрона и нагрузочной прямой при постоянном напряжении на элементе подсветки и постоянном напряжении источника 6.
В предлагаемом способе реализованы все три метода управления регенеративным оптроном. С помощью источника 1 (фиг.1з) устанавливается то или иное напряжение уставки на элементе подсветки 2, которым определяется уровень порога срабатывания, т.е. точка максимума вольт-амперной характеристики (фиг. 16), Этотуровень порога срабатывания, в определенной пропорции, определяет допустимый ток электродвигателя привода пилы. Напряжение вторичной обмотки трансформатора, пропорциональное току нагрузки электродвигателя привода пилы, подается на цепь питания регенеративного оптрона 3, 4 и 5, а его изменение, определяемое сопротивлением резания (нагрузкой) приводит к перемещению линии нагрузки (фиг.1в). Предположим, в исходном состоянии линия нагрузки занимала положение ЕЕ, но при увеличений сопротивления резанию, возрос ток электродвигателя привода пилы, что привело к увеличению напряжения в цепи питания регенеративного оптрона и перемещению линии нагрузки к положению, например АВ, при -котором имеется неустойчивая точка сопряжения Мь а это, в свою очередь, приведет к срабатыванию оптрона, т.е. броску тока в его цепи от значения И до 12 (фиг. 1в), который может быть использован для формирования сигнала управления электроприводом скорости подачи лесоматериала с одновременным увеличением сопротивления 5 нагрузки оптрона. Увеличение сопротивления 5 нагрузки приводит к Выходу линии нагрузки из
состояния сопряжения с вольт-амперной характеристикой за счет увеличения угла до
#1, что может быть использовано для окончания процесса управления уменьшением скорости подачи лесоматериала,
При уменьшении сопротивления резанию линия нагрузки смещается вниз, так как ток потребления электродвигателя привода пилы уменьшается и может занять положение, например CD, при котором имеет место неустойчивая точка сопряжения М2, наблюдается обратный бросок тока в сторону его уменьшения от значения з до t, который может быть использован для увеличения скорости подачи лесоматериала с одновременным уменьшением сопротивления нагрузки до значения угла tti, что приведет к выводу линии нагрузки из зоны
сопряжения с неустойчивой точкой вольт- амперной характеристики и может быть использовано для остановки процесса управления скорости подачи лесоматериала. Таким образом, непосредственное управление уровнем порога срабатывания и самим срабатыванием регенеративного оптрона в зависимости от тока потребления электродвигателя привода пилы может быть использовано для регулирования скорости
подачи лесоматериала.
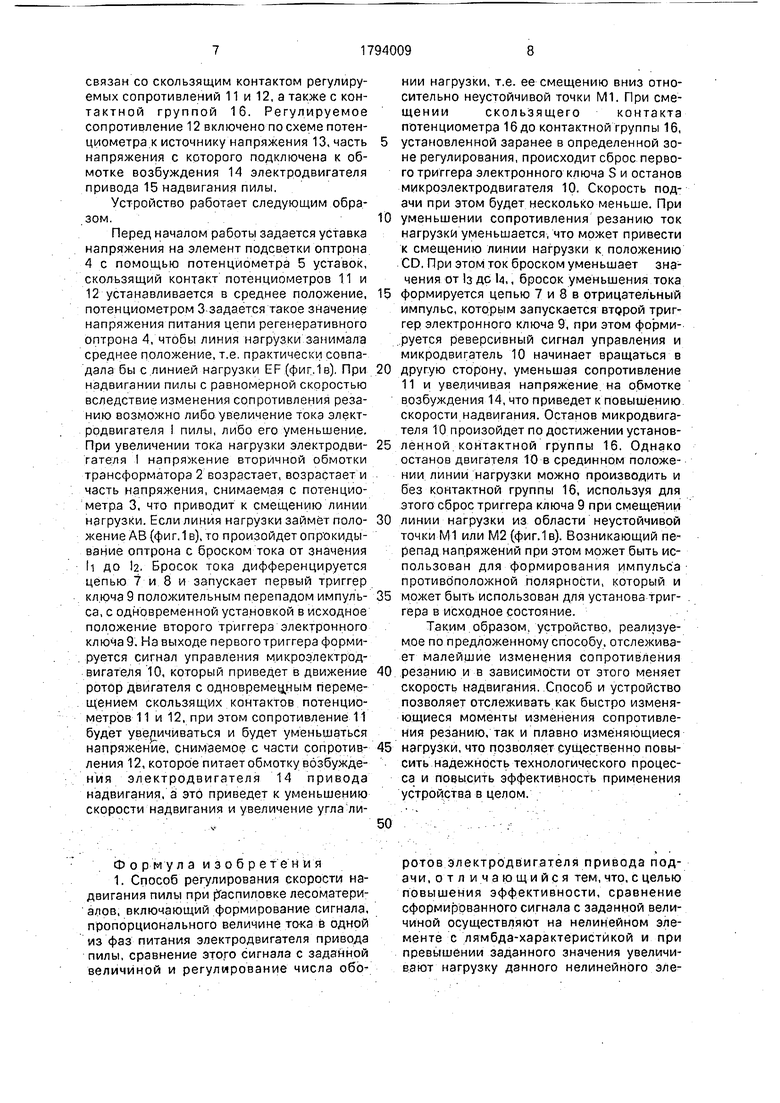
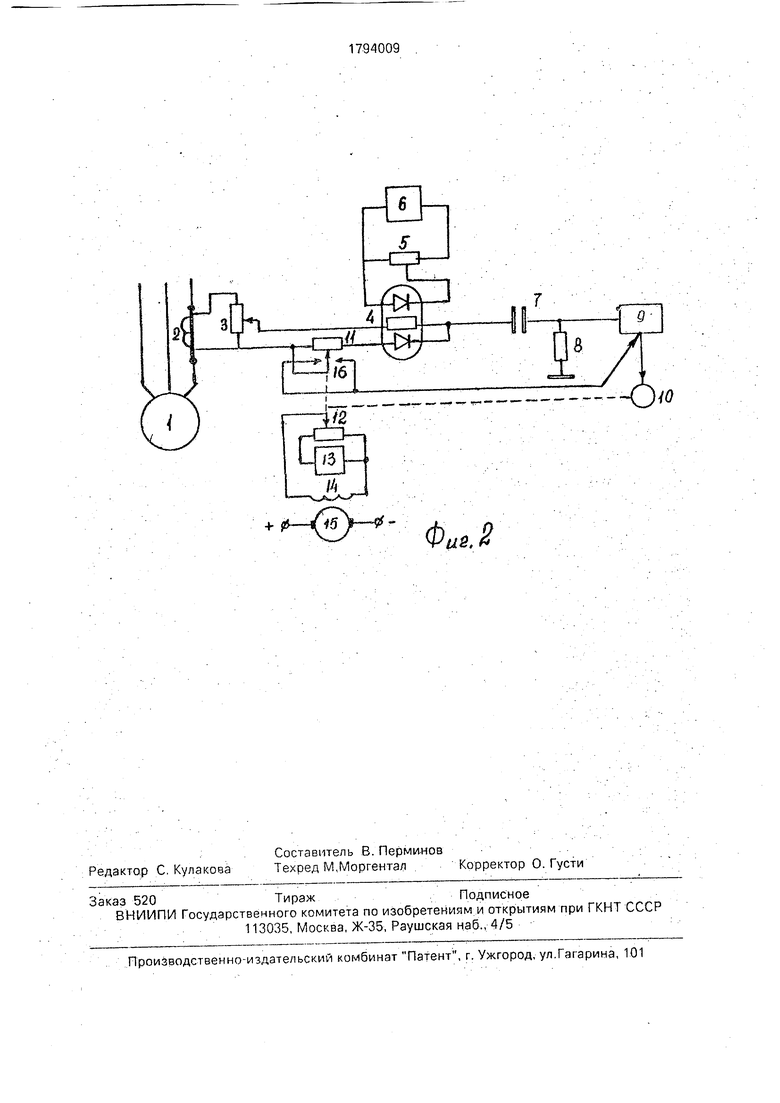
Схема устройства, реализованного по описанному способу, представлена на фиг.2. Устройство для регулирования скорости надвигания пилы при распиловке лесоматериалов содержит электродвигатель 1 привода пилы, трансформатор тока 2, под- строечноё сопротивление 3, оптрон 4, потенциометр 5 уставок, источник 6 опорного напряжения, емкость 7 и резистор 8 дифференцирующей цепи, электронный ключ 9, например RS триггер, микроэлектродвигз- тель управления 10, регулируемое сопротивление 11 нагрузки регенеративного оптрона, регулируемое сопротивление 12
источника 13, обмотки возбуждения 14 электродвигателя 15 привода надвигания пилы, контактные группы 16 задания ширины зоны регулирования.
В фазу питания электродвигателя 1
включена первичная обмотка трансформатора 2 тока, его вторичная обмотка подключена к подстроечному сопротивлению 3, часть напряжения с которой подается на цепь питания регенеративного оптрона 4,
последовательно в цепь которого включено регулируемое сопротивление 11 нагрузки с контактной группой 16 задания ширины зоны регулирования. С регулируемого сопротивления 5 источника опорного напряжения
6 часть напряжения уставок подается на .элемент подсветки оптрона 4. Выход регенеративной цепи оптрона 4 подключен через дифференцирующую цепь, состоящую из конденсатора 7 и резистора 8 к входу
электронного ключа 9, например RS триггера, выход которого через управляющую контактную группу 16 подключен к цепи управления микроэлектродвигатель 10. Приводной вал двигателя 10 кинематически
связан со скользящим контактом регулируемых сопротивлений 11 и 12, а также с кон- тактной группой 16. Регулируемое сопротивление 12 включено по схеме потенциометра.к источнику напряжения 13, часть напряжения с которого подключена к обмотке возбуждения 14 электродвигателя привода 15 надвигания пилы,
Устройство работает следующим образом.
Перед началом работы задается уставка напряжения на элемент подсветки оптрона 4 с помощью потенциометра 5 уставок, скользящий контакт потенциометров 11 и 12 устанавливается в среднее положение, потенциометром 3 задается такое значение напряжения питания цепи регенеративного оптрона 4, чтобы линия нагрузки занимала среднее положение, т.е. практически совпадала бы с линией нагрузки EF (фиг.1 в). При надвигании пилы с равномерной скоростью вследствие изменения сопротивления резанию возможно либо увеличение тока электродвигателя I пилы, либо его уменьшение, При увеличении тока нагрузки электродвигателя I напряжение вторичной обмотки трансформатора 2 возрастает, возрастает и часть напряжения, снимаемая с потенцио- метра 3, что приводит к смещению линии нагрузки. Если линия нагрузки займёт положение АВ (фиг.1 в), то произойдет опр окиды- вание оптрона с броском тока от значения Н до 2. Бросок тока дифференцируется цепью 7 и 8 и запускает первый триггер ключа 9 положительным перепадом импульса, с одновременной установкой в исходное положение второго триггера электронного ключа 9. На выходе первоготриггера формируется сигнал управления микроэлектродвигателя 10, который приведет в движение ротор двигателя с одновременным перемещением скользящих контактов потенциометров 11 и 12, при этом сопротивление 11 будет увеличиваться и будет уменьшаться напряжение, снимаемое с части сопротивления 12, которое питает обмотку возбуждения электродвигателя 14 привода надвигания, а это приведет к уменьшению скорости надвигания и увеличение угла линии нагрузки, т.е. ее смещению вниз относительно неустойчивой точки М1. При смещении скользящего контакта потенциометра 16 до контактной группы 16,
установленной заранее в определенной зоне регулирования, происходит сброс первого триггера электронного ключа S и останов микроэлектродвигателя 10. Скорость подачи при этом будет несколько меньше. При
уменьшении сопротивления резанию ток нагрузки уменьшается, что может привести к смещению линии нагрузки к положению CD, При этом ток броском уменьшает значения от з до 14,, бросок уменьшения тока
формируется цепью 7 и 8 в отрицательный импульс, которым запускается втррой триггер электронного ключа 9, при этом формируется реверсивный сигнал управления и микродвигатель 10 начинает вращаться в
другую сторону, уменьшая сопротивление 11 и увеличивая напряжение/на обмотке возбуждения 14, что приведет к повышению скорости надвигания. Останов микродвигателя ТО произойдет по достижении установленной контактной группы 16. Однако останов двигателя 10 в срединном положении линии нагрузки можно производить и без контактной группы 16, используя для этого сброс триггера ключа 9 при смещении
линии нагрузки из области неустойчивой точки М1 или М2 (фиг.1 в). Возникающий перепад напряжений при этом может быть использован для формирования импульса противоположной полярности, который и
может быть использован для установа триггера в исходное состояние.
Таким образом, устройство, реализуе- м.ое по предложенному способу, отслеживает малейшие изменения сопротивления
резанию и в зависимости от этого меняет скорость надвигания. Способ и устройство позволяет отслеживать как быстро изменяющиеся моменты изменения сопротивления резанию, так и плавно изменяющиеся
нагрузки, что позволяет существенно повысить надежность технологического процесса и повысить эффективность применения устройства в целом.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ регулирования скорости надвигания пилы при распиловке лесоматериалов и устройство для его осуществления | 1990 |
|
SU1831419A3 |
| Устройство для измерения крутящего момента на валу асинхронного электродвигателя | 1991 |
|
SU1794243A3 |
| Устройство для измерения крутящего момента на валу асинхронного электродвигателя | 1990 |
|
SU1747963A1 |
| Сигнализатор крутящего момента на валу асинхронного электродвигателя | 1987 |
|
SU1500876A2 |
| Устройство для контроля асинхронных электродвигателей | 1990 |
|
SU1742653A1 |
| Способ измерения сопротивления и устройство для его осуществления | 1990 |
|
SU1789940A1 |
| Способ поперечной инерционной распиловки лесоматериалов круглыми пилами | 1983 |
|
SU1357226A1 |
| Автоматизированный многопильный станок | 1983 |
|
SU1130458A1 |
| Устройство для измерения крутящего момента на валу асинхронного электродвигателя | 1987 |
|
SU1580187A1 |
| Срезающее устройство лесозаготовительной машины | 1987 |
|
SU1512525A1 |
Использование: средства деревообработки. Сущность изобретения: формируют сигнал, пропорциональный току в любой из фаз цепи питания электродвигателя привода пилы, после чего сравнивают данный сигнал с установленной величиной. По результатам сравнения, реализуемом на нелинейном элементе с лямбда-характеристикой, регулируют число оборотов привода подачи. 2 с,п.ф-лы, 2 ил.. - .
Формула изобретения 1. Способ регулирования скорости надвигания пилы при распиловке лесоматериалов, включающий формирование сигнала, пропорционального величине тока в одной из фаз питания электродвигателя привода пилы, сравнение этого сигнала с заданной величиной и регулирование числа оборотов электродвигателя привода подачи, отличаю щи йс я тем, что, с целью повышения эффективности, сравнение сформированного сигнала с заданной величиной осуществляют на нелинейном элементе с лямбда-характеристикой и при превышении заданного значения увеличивают нагрузку данного нелинейного элемента и уменьшают напряжение питания обмотки возбуждения электродвигателя привода подачи, в противном случае, уменьшают нагрузку нелинейного элемента и одновременно увеличивают напряжение питания обмотки возбуждения электродвигателя привода подачи.
2, Устройство для регулирования скорости надвигания пиль при распиловке лесоматериалов, содержащее трансформатор тока для включения в фазу питания электродвигателя привода пилы, резистор нагрузки трансформатора, отличающееся тем, что, с целью повышения эффективности, оно снабжено регенеративным оптроном с источником опорного напряжения и нагрузочным резистором, дифференцирующей цепью, электронным ключом, микродвигателем, переменным сопротивлением ./
грузки регенеративного оптрона с контактными группами задания ширины зоны регулирования и потенциометром обмотки возбуждения двигателя привода подачи, при этом выход резистора нагрузки трансформатора посредством цепи нагрузки регенеративного оптрона сообщен с дифференциальной цепью, выход которой связан с первым входом электронного ключа, нагрузкой последнего является микродвигатель, вал которого кинематически связан с движком переменного сопро- тивления нагрузки регенеративного оптрона и движком потенциометра обмотки возбуждения двигателя привода подачи, причем контактные группы задания ширины зоны регулирования электрически связаны и подключены к второму входу электронного ключа.
J-I---t , : г О Ј
| Авторское свидетельство СССР № 1685043, кл | |||
| Прибор с двумя призмами | 1917 |
|
SU27A1 |
