Изобретение относится к способам измерения физико-химических характеристик ж лдких сред, в частности их вязкости и плотности.
Цель изобретения - упрощение способ.
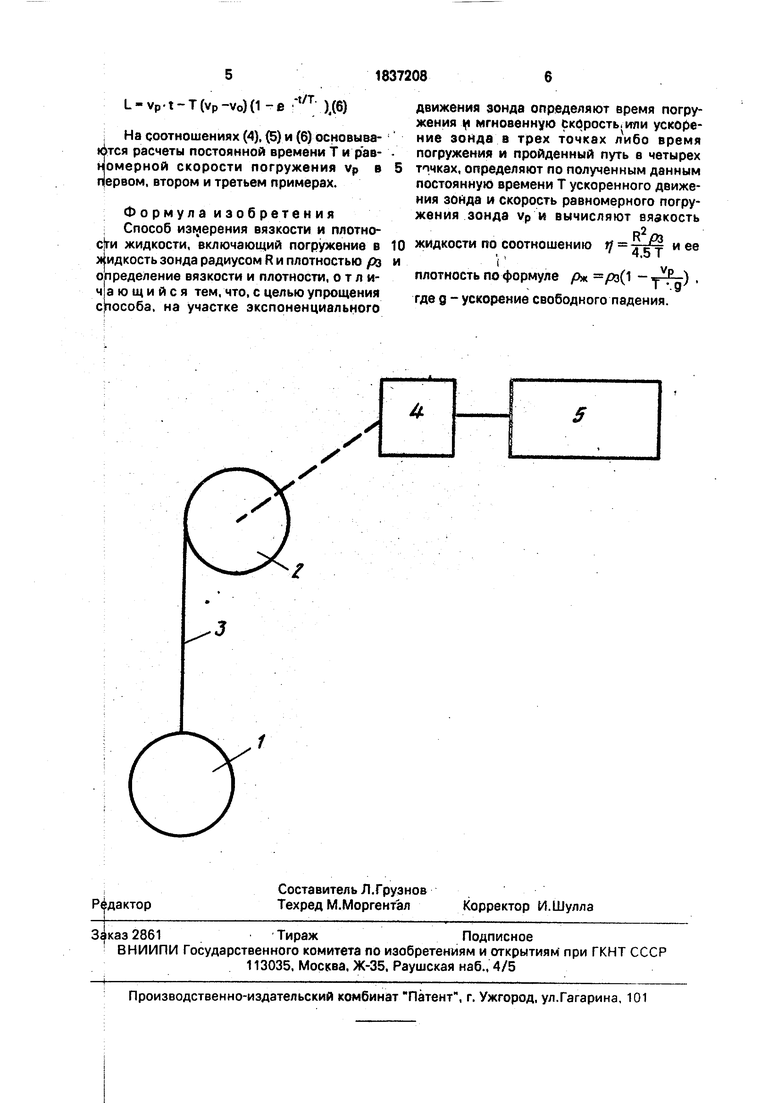
Сущность изобретения поясняется чертежом, на котором представлена структурная схема реализующего способ устройства.
Устройство содержит шаровой зонд 1, закрепленный на барабане 2 с помощью т юса 3. В свою очередь ось барабана 2 кинематически связана с осью датчика 4, выход которого подключен к входу решающего блока 5.
Предлагаемый способ измерения вязкости и плотности жидкости может быть реализован следующим образом.
Пример 1. В начале измерения г оворотом барабана 2 поднимают на требу- емую высоту погруженный в жидкость шаровой зонд 1 и освобождают его. Начинается свободное погружение на большую глубину шарового зонда 1 под действием собственного веса. Это сопровождается вращением барабана 2 под действием троса 3, что вызывает вращение оси датчика 4, которым в рассматриваемом случае выдается на вход решающего блока 5 напряжение, пропорциональное мгновенному значению скорости погружения шарового зонда 1. Решающий блок 5 измеряет три момента времени, в которые выходное -напряжение датчика 4 принимает три предопределенных значения. На завершающей стадии измерения подстановкой значений скоростей и соответствующих им времен в уравнение, характеризующее динамику погружения зонда 1, получают систему из трех уравнений с тремя неизвестными. Решая эту сис- те-му получают искомые значения постоянной времени экспоненты Т и равно(Л
С
со со VI ю о
00
мерной скорости погружения vp. Подстановка этих значений в формулы для расчета значений вязкости и плотности, другие величины которых известны, позволяет рассчитать измеренные значения вязкости и плотности жидкости,
Пример 2. Как и ранее, в начале измерения поворотом барабана 2 поднимают в жидкости на требуемую высоту шаровой зонд 1 и освобождают его, обеспечивая свободное погружение под действием собственного веса. Происходит вращение барабана 2 под действием троса 3, которое контролируется датчиком 4. На выходе этого датчика формируется напряжение, пропорциональное мгновенному значению ускорения шарового зонда 1 при погружении в жидкость. После начала погружения в какой-то момент времени решающий блок 5 заменяет выходное напряжение датчика А и запоминает время выполнения замера. После этого им рассчитывается напряжение, в е раз (е - основание натуральных логарифмов) меньшее измеренного. Далее решающий блок 5 измеряет время, в течение которого текущее напряжение на выходе датчика 4 станет равным рассчитанному. Разность между вторым и первым измеренными решающим блоком 5 временами и является постоянной времени экспоненты Т. Интегрирование решающим блоком 5 напряжения датчика 4 обеспечивает измерение равномерной скорости погружения vp, Подстановкой этих значений е формулы рассчитывают значения измеряемых величин.
Пример 3. После подъема шарового зонда 1, как описано ранее, перед очередным замером, освобождают его, обеспечивая свободное погружение в жидкость. Это вызывает вращение барабана 2 под воздействием троса 3. Одновременно с вращением барабана 2 вращается кинематически связанная с ним ось датчика 4, С выхода этого датчика на вход решающего блока 5 поступают одиночные импульсы после каждого поворота оси датчика 4 на заданный угол, т.е. после погружения шарового зонда 1 на заданное расстояние. Решающий блок 5 запоминает время возникновения каждой метки и рассчитывает результирующее расстояние, проходимое шаровым зондом 1. При этом выделяется требуемое число пар измеренных длин траектории движения шарового зонда 1 и времен их прохождения. На завершающей стадии измерения/решая систему из необходимого числа уравнений, соответствующих равноускоренному движению при подстановке в них измеренных длин и соответствующих им времен, в решающем блоке 5 получают искомое значение постоянной времени Т и скорости равномерного погружения Vp. После этого, подстановкой этих значений в формулы для расчета значений вязкости и плотности,
другие величины которых известны, получают измеренные значения вязкости и плотности жидкости.
Динамику свободного погружения в жидкости шарового зонда 1 характеризует
следующее дифференциальное уравнение
JtR3(p3-px) -g-6nRr -v, О)
где v - текущее значение скорости движения зонда;
t - время движения зонда; g- ускорение свободного падения; рз плотность шарового зонда; РЖ -- плотность жидкости; г) - измеряемая вязкость жидкости; R - радиус шарового зонда.
При установившемся движении с равномерной скоростью в соответствии с законом Стокса справедливо соотношение
|л:Р3(/оз-рж)д -GnRtj , (2)
где vp - равномерная скорость погружения шарового зонда 1.
Дифференциальное уравнение (1) с учетом уравнения (2) может быть прёобразова- но к виду
d ( v - Vp) 4,5 V-Vp
dt
(3)
45
Решение уравнения (3) может быть представлено следующим соотношением
v Vp-{vp-v0).e t/T,(4)
.
v0-начальная скорость шарового зонда 1;
Т - постоянная времени ускоренного движения.
Дифференцирование в интегрирование уравнения (4) позволяет получить следующие соотношения, характеризующие изменение во времени ускорения dv/dt и длины пути L, проходимого шаровым зондом 1:
dy.VP-VQ ..e-t/T.f5)
dt T ,l&
L-vp-t-T(vp-v0)(1 -e
t/T.
),(6)
; На соотношениях (4), (5) и (6) основыва- расчеты постоянной времени Т и р ав- номерной скорости погружения vp в первом, втором и третьем примерах.
Формула изобретения : Способ измерения вязкости и плотности жидкости, включающий погружение в жидкость зонда радиусом R и плотностью рз определение вязкости и плотности, о т л и- ч|ающийся тем, что, с целью упрощения сЬособа, на участке экспоненциального
0 и
движения зонда определяют время погружения и мгновенную скорость, или ускорение зонда в трех точках либо время погружения и пройденный путь в четырех точках, определяют по полученным данным постоянную времени Т ускоренного движения зонда и скорость равномерного погружения зонда Vp И ВЫЧИСЛЯЮТ ВЯЗКОСТЬ
Rjtt
4.5 Т
I
плотность по формуле р /оз(1 - у-Ј-) . где g - ускорение свободного падения.
жидкости по соотношению rj
и ее
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ ВЯЗКОСТИ ЖИДКОСТИ | 1993 |
|
RU2082958C1 |
| СПОСОБ ИЗМЕРЕНИЯ ВЯЗКОСТИ ЖИДКОСТИ | 1994 |
|
RU2080584C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРЕДЕЛЬНОЙ СКОРОСТИ ДВИЖЕНИЯ ТЕЛА В ЖИДКОСТИ, ПРИ КОТОРОЙ СПРАВЕДЛИВ ЗАКОН СТОКСА | 1993 |
|
RU2069346C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ВЯЗКОСТИ И ПЛОТНОСТИ ЖИДКОСТИ | 1994 |
|
RU2082153C1 |
| Измеритель вязкости жидкости | 1990 |
|
SU1822939A1 |
| СПОСОБ ИЗМЕРЕНИЯ ВЯЗКОСТИ ЖИДКОСТИ | 1994 |
|
RU2061216C1 |
| СПОСОБ ИЗМЕРЕНИЯ ВЯЗКОСТИ ЖИДКОСТИ | 1994 |
|
RU2061217C1 |
| Датчик параметров жидкости | 1980 |
|
SU1052933A1 |
| СПОСОБ ИЗМЕРЕНИЯ ВЯЗКОСТИ И ПЛОТНОСТИ ЖИДКОСТИ | 1994 |
|
RU2084865C1 |
| Измеритель вязкости жидкости | 1989 |
|
SU1702251A1 |
Назначение: изобретение предназначено) для измерения физико-химических характеристик жидких сред, в частности их вязкости и плотности. Сущность изобретения: способ включает погружение зонда радиуса R и плотности в исследуемую жидкость. На участке экспоненциального движения зонда определяют время погружения и мгновенную скорость или ускорение зонда и трех точках, либо время погружения и пройденного пути в четырех точках, определяют по полученным данным постоянную времени Т ускоренного движения зонда и скорость равномерного погружения Vp, ВЯЗКОСТЬ И ПЛОТНОСТЬ ВЫЧИСЛЯЮТ поприведеннымформулам. и Р ,оз/11 ИЛ.
