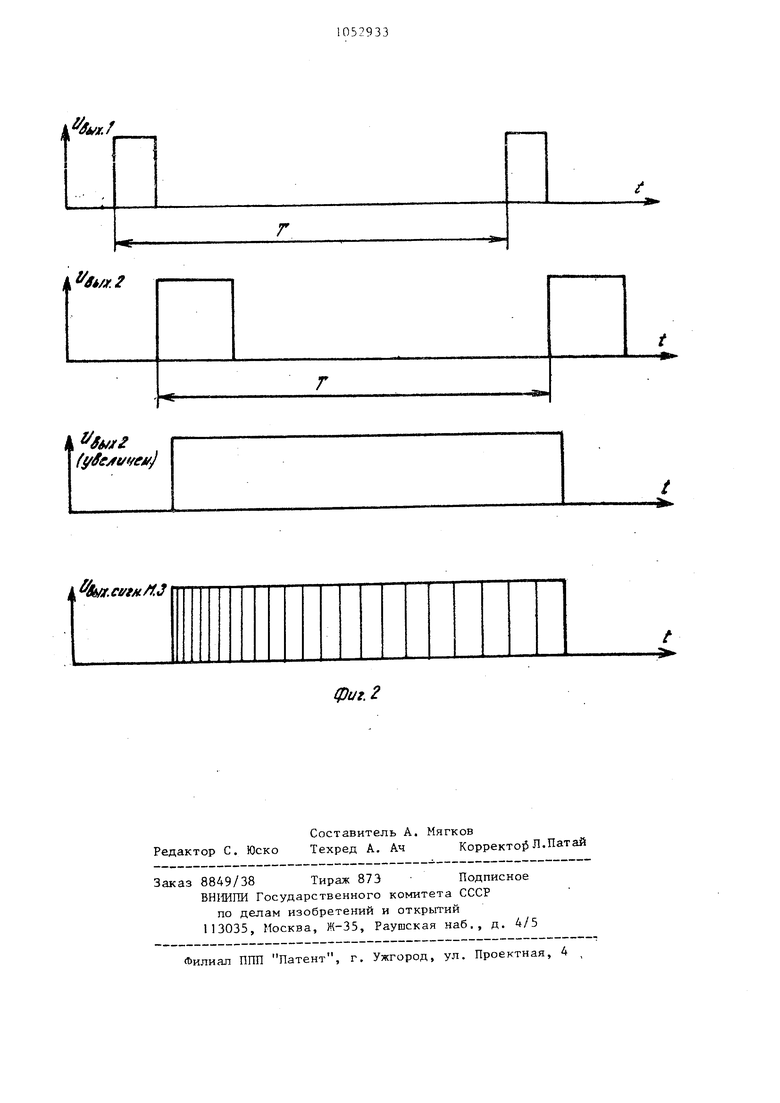
Изобретение Огиоси.т1.;я к технике; измерения параметпоп жидкостей и к сается датчиков, служащих для измерения уролня, 1тлотиост-ц и вязкости жидких средни может быть использован в спгтпие техг ических средств автомати.-чированнык систем управлени техн :хг огическимк пpoцecca м. Известен датчик параметров жидкости, преимущественно щихты в клеевой коробке илихтовальной машины, с;одержа1(нй электродвигатель вал ко Topoio кине татическн связан с входо 5,г1ектромагнитнсй муфты, зонд с зоидопроводником, сшналнзатор меток I зопдопроводника и блок управления, подключенньт первьЕ выходом к э. ектродвигателю м электромагнитной iyф те, я втооым выходом - к входу сигналиэатора :чондопроводн 1ка М | Однако датчик обеспечивает H3Nte лиШЬ вязкости контролрруемой хя-ьдкосги. что сужает его функционал ные ЯОЗГ4ОЖЯОСТН, Цель илСбретеиия - расширение фуикцио1-;алькых возможностей, - Поставленная иел.- достигается тем, что датчик параметров жидкости содержаэт,ий электродвиг ате.ггь, вал которого киненатичоски связан с вхо дом электромагнитной 1уфтЫр зонд с зондопроводником, С инали1затор мето зон допроводника и блок управления, подкх юченный первым В1,ходом к электродвигатеотю и электромагнитной ryф те., а вторым выходом - к входу сигнализатора меток зондопроводника, имеет бсЧрабап для намотки зондопроводника, кинематически связанный с вькодом электромагнитно муфты и р гулятор натяжения зондопроводника, включаюапш измеритель момента вращения, дополнительньш электродвигатель., кинематически связанные с барабаном для намоткз-; зондопроводникаэ и блок регулкрования, вход ко торого подключен к измерителю момента вращения, а вьжод - к дополни тельному электродвигателю, причем зонд вьшолкен из материала, средняя плотность которого меньше плотности контролируемой жидкости, На фиг, 1 представлена структурная схема предлагаемого датчика на фиг, 2 временная диаграмма работы некоторБгх его элементов, Датчртк параметров жидко.сти содер Лчит блок 1 управлетгия, электродвига тель 2 для с-бос печени я требуемого 332 запаса энергии в начале измерении, электромагнитную муфту 3, барабан А для наьютки зондопроводиика 5, выбирающий слабину гибких sjreMeHTOB датчика в процессе измерения, сигнализатор 6 меток зондопроводника 5, считывающий код проходяией мимо его чувствительного элемента метки, нонд 7.воспринимающий тормозящее воздействие жидкости, направляющие 8, обеспечивающие движение зонда по заданной траектории, измеритель 9 момента врагенил, оценивающий величину момента вращения в процессе дви кения зонда 7, блок Ш регулирования, выдающ.н требуемое напряжение, дополнительный электродвигатель 11, обеспечивающий постоянство натяжения зондопроводкика 7, Вал электродвигателя 2 кинематически связан с входом электромагнитной -1уфты 3, выход которой кинетматически связан с барабаном 4 для намотки зондопроводника 5 измерителем 9 момента вращения и дополнительшз м электродвигателем 1 1 , Зонд 7 закреплен на конце зондопроводника 5, контактирующего с направляющими 8,другой конец которого закреплен ыа барабане 4 для намотки зондопро.водника 5. Блок I управле1п.1я подключен первым выходом к электродвигателю 2 и электромагнитной муфте 3, а вторш-1 вьгходом - к сигнализатору 9 вращения, а выходом - с дополнительным электродвигателем I. Датчик параметров жидкости работает следукщим образом. Срабатывание блока 1 управления происходит через заданные промежутку времени Т /фиг,2, определяемые требуемой периодичностью измерения иарвметероэ контролируемой гшдкости. В первой позиции с его первого выхода подается напряжение(jgi,,4 . на электродвигатель 2 и- электромагнитную муфту 3, Прк срабатывйнии электромагнитной муфты 3 ее входная ось,, механически связанная с валом электродвигателя 2s подключается к выходной оси, в свою очередь соединенной с валом барабана 4 для намотки зондонроводника, вал которого начинает вращаться под воздействием электродвигателя 2, Зондопроводник 5 н;;матьтается. на барабан. Этим обеспечивается подъем зонда 7 перед очередным измерением. После этого блок 1 унраЕ.леи.ия переходит во вторую позицию. При этом исчезает напряжение на его первом выходе 5 а с втсфого выхода подается напряжение и ubix о а сигнализатор 6 метгк зондопроводника, включающее его в работу. Электромагнитная муфта 3 разъединяет свою входную и выходную оси, ротор электродвигателя 2 останавливается. Начинается свободное падение зонда 7, Сигнализатор 6 меток зондопроводника выдает ни выход датчика код метки зондопроводника 5 каждый раз когда мимо его чувствительного элемента проходит очередная нетка. В какой-то момент времени, двигаясь равноускоренно, зонд 7 достигает поверхности контролируемой жидкости и начинает погружаться в нее. Несмотря на то, что средняя плотность материала зонда 7 меньше плотности контролируемой жидкости, погружение происходит прежде всего веледствие кинетической энергии, запасенной зондом 7 в процессе свободного падения. Однако при высокой вязкости контролируемой жидкости зонд 7, постепенно сиижая скорость погружения, медленно приближается к установившемуся положению на плаву. При малой величине вязкости контролируемой жидкости зоид 7 первоначально погружается на глубину, большую установившегося положения на пла ву, и приходит к этому положению ПОС ле нескольких колебаний в вертикальном направлении. Измерение параметров контролируемой жидкости основывается на характере движения зонда 7 в ней. Информация, вьщаваемая сигнализатором 6 меток зондопроводника, накапливается в памяти вычислительной машины (не показана) подключенной к выходу дат 4ftRa, К концу очередного цикла измерения в памяти вычислительной машины зафиксированы коды номеров меток зондопроводиика 5, последовательно проходящих мимо чувствительного элемента сигнализатора 6 меток зондопроводника, и точное время выдачи к дов сигнализатора 6, Указанной инфор мации достаточно для определения уровня, вязкости и плотности контролируемой жидкости. Расчет параметров контролируемой жидкости наиболее удобно начать с о ределения уровня. В то время, когда зонд 7 находится над поверхностью жидкости, он падает с ускорением. 34 При -ЭТОМ временные промежутки между сигналами о прохождении меток мимо чувствительного элемента сигнализатора 6 меток зондопроводпика 5 последовательно сокращаются. При входе в жидкость скорость зонда 7 резко падает. Временные промежутки между сигналами о прохождении меток резко увеличиваются. Уровень контролируемой ж-идкости находится между метками, которым соответствует первое изменение временных промежутков от умень шения к увеличению. По коду метки определяется уровень контролируемой жидкости. Оценка вязкости контролируемой ж-идкости возможна на основании янализа характера движения зонда 7 до установившегося положения на плаву. В основу расчета вязкости может быть взято уравнение при пренебрежительно малом натяжении зондопроводн 1ка З) Mx4k( 0, (Л где М - масса зонда 7; коэффициент, характеризующий противодействие контролируемой жидкости движению зонда 7; X - отклонение зонда 7 от установившегося положения на плаву в вертикальном направлении;X - текущая скорость движения зонда 7; X - текущее ускорение движения зонда 7; р - средняя плотность зонда 7; bV (х1 - объем зонда 7, находящийся над или под жидкостью по сравнению с установившимся положением на плаву. р-б.Ц При условиях iV(H)-S- llH-:- rj- 4 решение уравнения (1) имеет вид ), (2) где А со и t - соответственно на«1альная амплитуда, круговая частота и фаза затухающих колебаний при успокоении зонда 7 на плаву в контролируемой /жидкости; показатель экспоненты, характеризующий быстроту затухания колебаний зонда 7.
Вычислительная машина на основании информации, поступившей в ее память, определяет амплитудные значения Л rt зонда 7-ерез п периодов и сам период Т. Далее находится промежуточная величина Ot , при п 1 представляющая собою логарифмический декремент затухания
( :й, InAi n.h.T,(3)
An .
после чего появляется возможность
найти
M;lt
k(it)-2WVi
пт
Далее на основании градуировочной кривой схемы рассчитывается измеренное значение вязкости t.:
Для определения плотности контролируемой жидкости достаточно выявить код метки, соответствующей моменту входа зонда 7 в жидкость, и код самой последней метки в процесса успокоения. При известной конфигурации зонда 7 и его средней плотности, информация о которых хранится в памяти вычислительной машины, по двум кодам этих меток можно рассчитать глубину погружения зонда 7 в жидкость и плотность контролируемой жидКОСТНя
Дпя нормальной работы датчика необходимо, с одной стороны, чтобы зон,цопроводник 5 постоянно находился в натянутом состоянии, а с другой, чтобы не оказьтал влияния на характер движения зонда 7. Это обеспечивается специально введенной схемой регулирования. Измеритель 9 момента вращения может быть выполнен, например, в виде двух валов связанных между собою торсионной пружиной. Угол скручивания пружины ограничен двумя концевиками, передающими уси5 лие от ведутцего вала к ведомому при повьшенных значениях вала барабана для намотки зондопроводиика 5. Угол скручивания торсионной пружины воспроизводится ползунком реохорда, с
0 которого через щетки и коллектор напряжение рассогласования передается На выход измерителя 9 момента вращения в Блок регулирования может быть выполнен в виде ПИД-регулятора,
5 выдающего управляющее .напряжение на дополнительный электродвигатель 1. Под воздействием этого напряжения дополнительный электродвигатель 1i создает тормозя1чий или ускоряющий
0 гА мвнты вращения вала барабана 4 для намотки зон,цопроводника .5.
В совокупности измеритель 9 моьгента вращения, блок ,1 регулирования и дополнительный электродвигатель 11
представляют собою следующую систему, обеспечивакщую в процессе работы такой режим, что зондопроводник 5 постоянно находится под некоторым заданным минимальным натяжением.
Экономический эффект от применения изобретения достигается путем расширения функциональных возможностей , который может быть эффективно использован в составе АСУТП тлихтования, что позволяет автоматизировать управление такими важными параметрами процесса шлихтования, как вязкость, уровень и плотность шлихты в клеевой коробке шлихтовальной машины и величины истинкого приклея основной пряжи.
4/Ж/
| название | год | авторы | номер документа |
|---|---|---|---|
| Датчик параметров жидкости | 1983 |
|
SU1124200A2 |
| ИЗМЕРИТЕЛЬ УРОВНЯ ЖИДКОСТИ И УРОВНЯ ПЕНЫ НАД ЕЕ ПОВЕРХНОСТЬЮ | 1993 |
|
RU2054632C1 |
| Датчик параметров жидкости | 1986 |
|
SU1408301A1 |
| Измеритель вязкости жидкости | 1988 |
|
SU1627918A2 |
| ТРЕХПОЗИЦИОННЫЙ РЕГУЛЯТОР ПЛОТНОСТИ ЖИДКОСТЕЙ | 1990 |
|
RU2024909C1 |
| ТРЕХПОЗИЦИОННЫЙ РЕГУЛЯТОР ПЛОТНОСТИ ЖИДКОСТЕЙ | 1988 |
|
RU2022320C1 |
| Измеритель вязкости жидкости | 1986 |
|
SU1318846A1 |
| Измеритель плотности жидкостей | 1988 |
|
SU1670531A2 |
| Датчик ротационного измерителя вязкости жидкостей | 1984 |
|
SU1267209A1 |
| Измеритель плотности жидкостей | 1990 |
|
SU1805333A1 |
ДАТЧИК ПАРАМЕТРОВ ЖИДКОСТИ, преимущественно шлихты в клеевой коробке шлихтовальной машины, содержащий электродвигатель, вал которого кинематически связан с входом электромагнитной муфты, зонд с зондопро водником, сигнализатор меток зондопроводника и блок управления, под ключенный первым выходом к электродвигателю и электромагнитной муфте, а вторым выходом - к -входу сигнализатора меток зондопроводника, отличающийся тем, что с целью расширения функциональных возможностей, он имеет барабан для намотки зондопроводника, кинематически связанный с выходом электромагнитной муфты, и регулятор натяжения зондопроводника, включаклщй измеритель момента вращения, дополнительный электродвигатель, кинематически связанные с барабаном для намотки зондопроводника, и блок регулирования, вход которого подключен к измерителю момента вращения, а i выход - к дополнительному электродвигателю, причем зонд выполнен из материала, средняя плотность которого меньгае плотности контролируемой жидкости.
%//
(y f t/lff//)
фиг. 2
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Датчик вязкости жидкости | 1976 |
|
SU648883A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
