Изобретение относится к автоматике и мЬжет быть использовано на подвижных, а зарийно-опасных транспортных средствах - автомобилях, троллейбусах, судах, по- е|}дах и др.
Цель изобретения - повышение функци- ойальной надежности способа.
Ниже приведен пример осуществления способа.
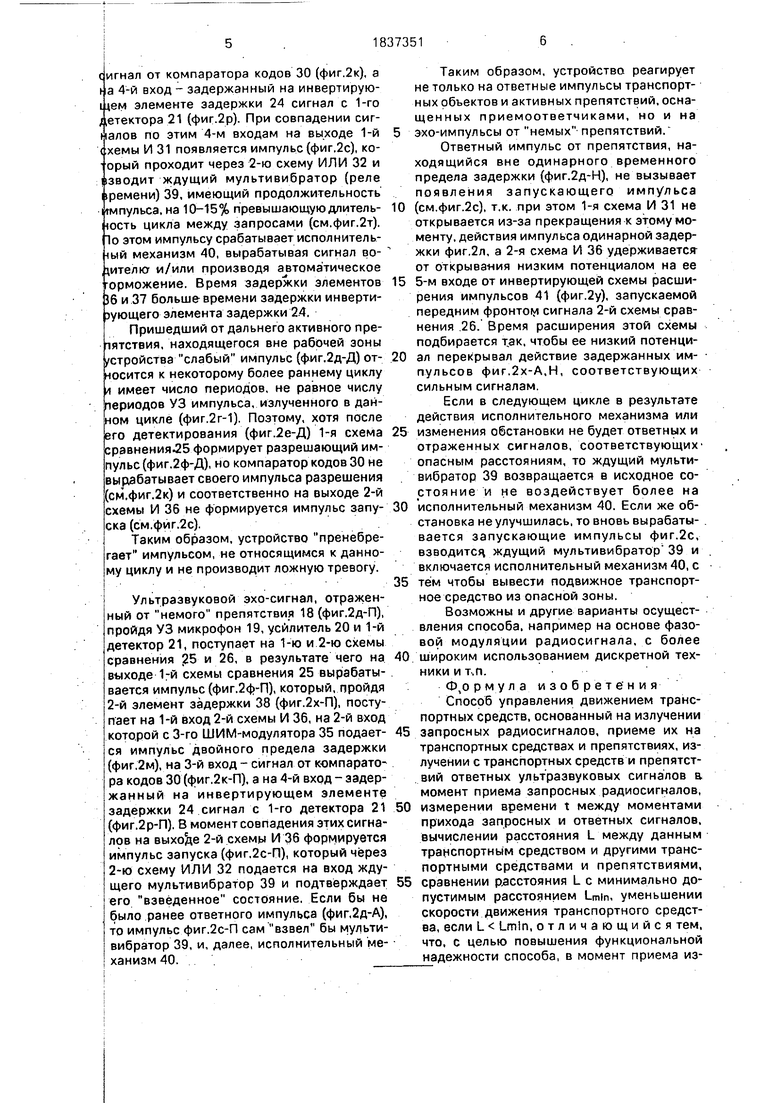
Структурная схема устройства для осу- uj ветвления способа представлена на фиг.1, эпюры напряжений - на фиг.2.
Устройство содержит комплект формирования единого сигнала запроса (радиостан- лю) I, в который входит высокочастотный итератор 1, модулятор 2, 1-й усилитель мрщностиЗ, передающая антенна 4, первый етчик 5, цифроаналоговый преобразователь 6 и 1-й широтно-импульсный (ШИМ) модулятор 7; комплект активного потенциального препятствия II, (которое само по себе не может быть источником опасности), содержащий 1-ю приемную антенну 8, первый в/ч - усилитель 9, первый делитель частоты 10, второй усилитель мощности 11 и первый ультразвуковой излучатель 12; комплект аварийно-опасного транспортного средства III, в который входят 2-я приемная антенна 13, второй в/ч -усилитель 14, второй делитель частоты 15, третий усилитель мощности 16, второй УЗ-излучатель 17, ультразвуковой микрофон 19, усилитель 20, первый детектор 21, второй детектор 22, источник опорных уровней 23 инвертирующий элемент задержки 24, первая схема сравнения 25, вторая схема сравнения 26, первая схема ИЛЙ-27, второй счетчик 28, третий счетчик 29, компаратор кодов 30, первая схема И 31, вторая схема ИЛИ 32, датчик скорости 33, второй ШИМ - модуля00
со -ч
CJ СП
тор 34, третий ШИМ-модулятор 35, вторая . схема И 36, первый и второй элементы задержки 37 и 38, ждущий мультивибратор 39, исполнительный механизм 40, инвертирующий расширитель импульсов 41. Элементы схемы соединень1, как показано на фиг.1.
Кроме того, на фиг.1 отображено препятствие 18, не оснащенное приемоответ- чиком (немое), отраженный от которого УЗ - сигнал II принимается УЗ - микрофоном 19, а также принимаемые микрофоном 19 ультразвуковой сигнал Н от ответчика, находящегося в неопасной зоне, но в пределах рабочей дальности действия устройства, и сигнал Д от ответчика, находящегося за пределами рабочей дальности.
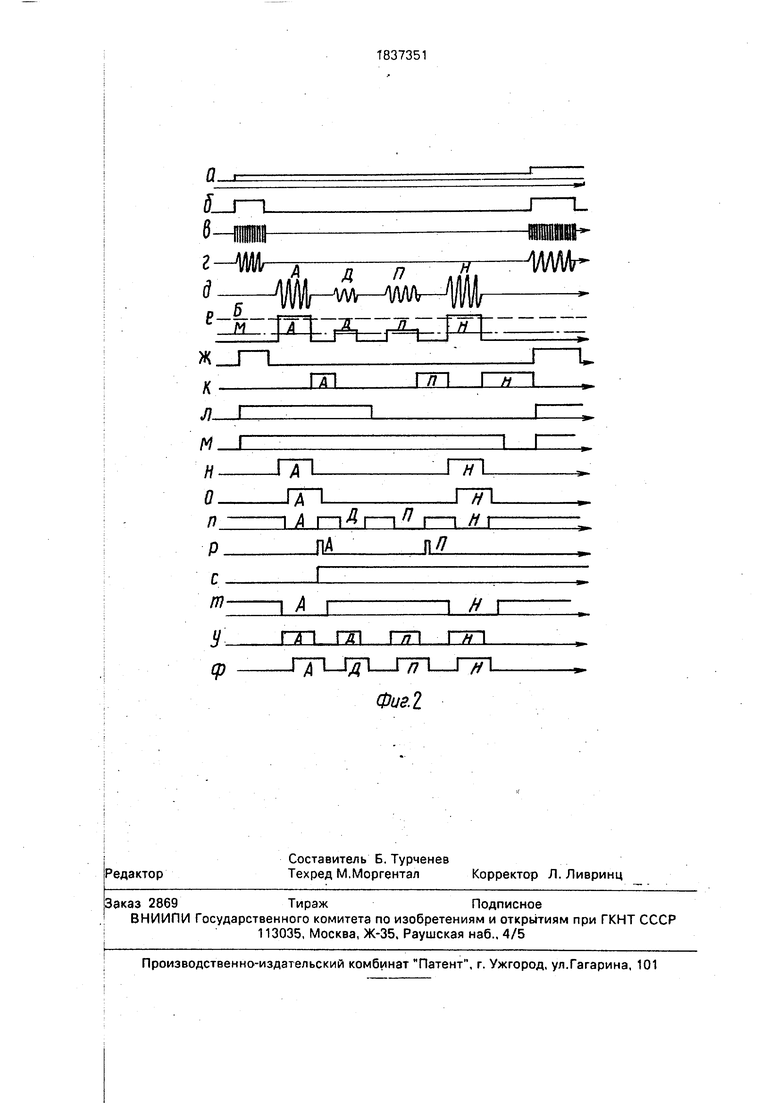
Устройство работает следующим образом. Высокочастотный генератор вырабатывает непрерывный синусоидальный сигнал в диапазоне средних или коротких волн, который поступает на модулятор 2 и первый двоичный счетчик 5, объем которого выбирается так, чтобы его полное заполнение занимало несколько секунд. Коды 2-3 старших разрядов счетчика 5 поступают на цифроа- налоговый преобразователь 6, на выходе которого образуется ступенчатое напряжение (см.фиг.2а), с длительностью шага (цикла) примерно 1 сек. Это напряжение воздействует на 1-й широтно-импульсный модулятор 7, синхронизируемый от младшего из выбранных старших разрядов счетчика 5, в результате чего на выходе Ш ИМ-мо дул я тора 7 образуются изменяющиеся по длительности импульсы (фиг.2б). На модуляторе 2 они воздействуют на высокочастотный сигнал, который проходит через 1-й усилитель мощности 3 и через передающую антенну 4 периодически излучается в пространство (фиг.2в). Этот радиосигнал принимается 1-й приемной антенной 8 активного препятствия П, усиливается 1-м в/ч усилителем 9 и делится по частоте 1-м делителем частоты 10 до ультразвукового диапёзона 25-30 кГц. Этот ультразвуковой сигнал проходит 2-й усилитель мощности 11 и возбуждает 1-й ультразвуковой излучатель 12, с выхода которого ответный ультразвуковой импульс излучается в пространство (фиг.2г). Как мы видим, длительность и число периодов радио- и ультразвукового сигналов каждый раз меняются. Одновременно на аварийноопасном объекте 111 также принимается 2-й приемной антенной 13 радиоимпульс запроса, который проходит 2-й в/ч - усилитель 14, второй делитель частоты 15, аналогичный делителю 10, третий усилитель мощности 16 и второй УЗ - излучатель 17, в результате чего также излучается в пространство ответный ультразвуковой импульс (фиг.2г). Задержкой по времени из-за значительной разности скоростей радиосигнала и ультразвука (100.106 и 330 м/сек) можно пренебречь, учитывая небольшие .опасные расстояния между объектом и препятствием (в пределах 100-150 м).
Излученный активным препятствием или другим транспортным средством ответ0 ный УЗ-импульс, если они находятся на пути следования аварийно-опасного объекта III, принимается его направленным УЗ-микро- фоном 19, усиливается усилителем 20 (фиг.2д-А), детектируется 1-м детектором 21
5 (фиг.2е-А) и поступает на вторые входы 1-й и 2-й схем сравнения 25 и 26, на первые входы которых поступают соответственно низкий М и высокий Б потенциалы (см.фиг.2е) от источника опорных уровней
0 23. Сигнал об опасности передается на исполнительный механизм 40 только в случае равенства числа периодов излученного в данном цикле (последнего по времени) и принятого ультразвуковых импульсов. Это де5 лается следующим образом. Высокочастотный сигнал от усилителя 14 детектируется 2-м детектором 22 (фиг.2ж). Передним фронтом этого импульса обнуляется 2-й счетчик 28, который подсчитывает и запоминает до сле0 дующею запроса число излучаемых периодов ответного сигнала, поступающего от 2-го делителя 15, одинакового с 1-м делителем 10. Код со 2-го счетчика 28 поступает на 2-й вход компаратора кодов 30, на 1-й вход
5 которого поступает код с 3-го счетчика 29, подсчитывающего число периодов принимаемого сигнала с усилителя 20 (фиг,2д). При этом счетчик 29 обнуляется как в начале цикла - со 2-го детектора 22, так и по прихо0 ду каждого принятого импульса - с 1-го детектора 21, через 1-ю схему ИЛИ 27. В случае равенства кодов на выходе компаратора 30 формируется импульс, действующий до прихода следующего принятого
5 импульса (фиг.2к). Сигнал от датчика скорости 33 (например, акселерометра) воздействует на 2-й и 3-й ШИМ - модуляторы 34 и 35, синхронизируемые сигналом со 2-го детектора 22 (фиг.2ж), которые вырабатывают
0 одинарный и двойной пределы временных задержек, относящиеся к ответному и эхо- сигналам (фиг.2л,м). Ответный продетекти- рованный сигнал фиг.2е-А, поскольку он превосходит верхний опорный уровень Б,
5 вызывает появление на выходе 2-й схемы сравнения 26 импульс (фиг.2н-А), который через 1-й элемент задержки 37 (фиг.2п) подается на 1-й вход 1-й схемы И31, на 2-й вход которой поступает импульс одинарного предела задержки (фиг.2л), на 3-й входсигнал от компаратора кодов 30 (фиг.2к), а а 4-й вход - задержанный на инвертирую- цем элементе задержки 24 сигнал с 1-го детектора 21 (фиг.2р). При совпадении сигналов по этим 4-м входам на выходе 1-й хемы И 31 появляется импульс (фиг.2с), ко- орый проходит через 2-ю схему ИЛИ 32 и изводит ждущий мультивибратор {реле фемени) 39, имеющий продолжительность импульса, на 10-15% превышающую длитель- юсть цикла между запросами (см.фиг.2т). 1о этом импульсу срабатывает исполнитель- шй механизм 40, вырабатывая сигнал во- ;ителю и/или производя автоматическое орможение. Время задержки элементов )6 и 37 больше времени задержки инверти- эующего элемента задержки 24.
Пришедший от дальнего активного препятствия, находящегося вне рабочей зоны устройства слабый импульс (фиг.2д-Д) относится к некоторому более раннему циклу л имеет число периодов, не равное числу периодов УЗ импульса, излученного в данном цикле (фиг.2г-1). Поэтому, хотя после его детектирования (фиг.2е-Д) 1-я схема сравнения.25 формирует разрешающий импульс (фиг.2ф-Д), но компаратор кодов 30 не вырабатывает своего импульса разрешения см,фиг.2к) и соответственно на выходе 2-й схемы И 36 не формируется импульс запуска (см.фйг.2с).
Таким образом, устройство пренебрегает импульсом, не относящимся к данному циклу и не производит ложную тревогу.
Ультразвуковой эхо-сигнал, отраженный от немого препятствия 18 (фиг.2д-П), пройдя УЗ микрофон 19, усилитель 20 и 1-й детектор 21, поступает на 1-ю и 2-ю схемы сравнения Ј5 и 26, в результате чего на выходе Ьй схемы сравнения 25 вырабатывается импульс (фиг.2ф-П), который, пройдя 2-й элемент задержки 38 (фиг.2х-П), поступает на 1-й вход 2-й схемы И 36, на 2-й вход которой с 3-го ШИМ-модулятора 35 подается импульс двойного предела задержки (фиг,2м), на 3-й вход - сигнал от компаратора кодов 30 (фиг.2к-П), а на 4-й вход - задер- жанный на инвертирующем элементе задержки 24 сигнал с 1-го детектора 21 (фиг.2р-П), В момент совпадения этих сигналов на выходе 2-й схемы И 36 формируется импульс запуска (фиг,2с-П), который через 2-ю схему ИЛИ 32 подается на вход ждущего мультивибратор 39 и подтверждает его взведенное состояние. Если бы не было ранее ответного импульса (фиг,2д-А), то импульс фиг.2с-П сам взвел бы мультивибратор 39, и, далее, исполнительный механизм 40.
Таким образом, устройство реагирует не только на ответные импульсы транспортных объектов и активных препятствий, осна- щенных приемоответчиками, но и на
эхо-импульсы от немых препятствий/
Ответный импульс от препятствия, находящийся вне одинарного временного предела задержки (фиг.2д-Н), не вызывает появления запускающего импульса
0 (см.фиг.2с), т.к. при этом 1-я схема И 31 не открывается из-за прекращениях этому моменту, действия импульса одинарной задержки фиг.2л, а 2-я схема И 36 удерживается от открыва-ния низким потенциалом на ее
5 5-м входе от инвертирующей схемы расширения импульсов 41 (фиг.2у), запускаемой передним фронтом сигнала 2-й схемы сравнения .26. Время расширения этой схемы подбирается так, чтобы ее низкий потенци0 ал перекрывал действие задержанных импульсов фиг,2х-А,Н, соответствующих сильным сигналам.
Если в следующем цикле в результате действия исполнительного механизма или
5 изменения обстановки не будет ответных и отраженных сигналов, соответствующих1 опасным расстояниям, то ждущий мультивибратор 39 возвращается в исходное со- стояние и не воздействует более на
0 исполнительный механизм 40. Если же обстановка не улучшилась, то вновь вырабатывается запускающие импульсы фиг.2с, взводится, ждущий мультивибратор 39 и включается исполнительный механизм 40, с
5 тем чтобы вывести подвижное транспортное средство из опасной зоны.
Возможны и другие варианты осуществления способа, например на основе фазовой модуляции радиосигнала, с более
0 широким использованием дискретной техники и т.п.
Ф,о р мула изобретения Способ управления движением транспортных средств, основанный на излучении
5 запросных радиосигналов, приеме их на транспортных средствах и препятствиях, излучении с транспортных средств и препятствий ответных ультразвуковых сигналов в момент приема запросных радиосигналов,
0 измерении времени t между моментами прихода запросных и ответных сигналов, вычислении расстояния L между данным транспортным средством и другими транспортными средствами и препятствиями,
5 сравнении расстояния L с минимально допустимым расстоянием Lmin, уменьшении скорости движения транспортного средства, если L Lmin, отличающийся тем, что, с целью повышения функциональной надежности способа, в момент приема изменяют длительность ответных ультразвуковых сигналов, на .каждом транспортном средстве запоминают число периодов ответного ультразвукового сигнала, излученного последним, которое сравнивают с числом периодов принятых ответных и отраженных ультразвуковых сигналов, отбрасывают все принятые ультразвуковые Ьигналы, у которых число периодов не равно запомненному, сравнивают амплитуды принятых ответных и отраженных-ультразвуко0
вых сигналов с двумя порогами, первый из которых задает максимальную дальность приема излученных транспортными средствами и препятствиями ответных сигналов, а второй - отраженных от транспортных средств и препятствий сигналов, для сигналов, превысивших оба порога, расстояние L вычисляют по формуле L V.t, а для сигналов, превысивших только второй порог - по формуле L 1/2.V.t, где V-скорость распространения ультразвуковых сигналов.
fl I
Mi 8
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ АВТОМОБИЛЕЙ | 1990 |
|
RU2022367C1 |
| Устройство для регистрации карьерного транспорта | 1989 |
|
SU1700572A1 |
| Устройство для передачи и приема дискретной информации | 1982 |
|
SU1042060A1 |
| Ультразвуковое устройство для измерения расстояний в газовой среде | 1985 |
|
SU1298540A1 |
| Устройство для передачи и приема дискретной информации | 1981 |
|
SU1005139A1 |
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ СУДОВ | 1991 |
|
RU2042212C1 |
| СПОСОБ ИМИТАЦИИ ДВУХЧАСТОТНЫХ РАДИОСИГНАЛОВ | 2012 |
|
RU2485541C1 |
| Устройство для контроля электромагнита | 1986 |
|
SU1388832A1 |
| Устройство для контроля и регистрации нарушений гладкости внутренней поверхности труб и пространственно-геометрических параметров трубопроводов | 1989 |
|
SU1629683A1 |
| Устройство для измерения времени распространения ультразвуковых колебаний | 1975 |
|
SU731306A1 |
г-т-я-- -n и rf-уИММ
eZar.:pL
гл
ж
ПП ГП ПП
9
rjLJJI-ПП-ТТЛ.
Й/г2
МШг
I I
M.
