Изобретение относится к автоматике и может быть использовано для управления движением автомобилей и других транспортных средство (ТС).
Известен способ предупреждения столкновений подвижных объектов, согласно которому излучают запросный радиосигнал, принимают его на ТС, излучают с ТС ответные ультразвуковые (УЗ) сигналы, принимают на ТС ответные УЗ-сигналы, измеряют на ТС временные интервалы между моментами приема запросного радио- и ответных УЗ-сигналов, сравнивают измеренные временные интервалы с минимально допустимыми и уменьшают скорость ТС, если измеренный временной интервал меньше допустимого.
Недостатком известного способа является низкая функциональная надежность, связанная с повышенной аварийностью на перекрестках из-за скопления ТС, предотвращения которого способ не предусматривает.
Целью изобретения является повышение функциональной надежности способа.
Цель достигается тем, что по способу регулирования движения автомобилей, основанному на излучении запросного радиосигнала, приеме его на ТС, излучении с ТС ответных УЗ-сигналов, приеме на ТС ответных УЗ-сигналов, измерений на ТС временных интервалов между моментами приема запросного радио- и ответных УЗ-сигналов, сравнении измеренных временных интервалов с минимально допустимыми, уменьшении скорости СТ, если измеренный временной интервал меньше минимального допустимого, запросный радиосигнал принимают на светофоре, расположенном на управляемом перекрестке, излучают со светофора ответные УЗ-сигналы, вычисляют на перекрестке скорости движения ТС, находящихся на расстоянии S1...Si...Sn,
vнi= Si/tнз; vкi= Si/tкз, необходимые для пересечения ТС перекрестка соответственно в момент tн3начала и tк3 конца действия ближайшего по времени разрешающего сигнала светофора, сравнивают скорости vнi и vкi с предельно допустимой скоростью движения vд на перегоне перед перекрестком, если vнi < vд и vк < vд, то выбирают для ТС, находящихся на расстоянии Si от перекрестка, соответственно минимальную и максимальную скорости движения: vминi = vкi и vмаксi = vнi, если vнi≥vд и vкi < vд, то vминi = vкi; vмаксi = = vд, если vнi≥vд и vкi≥vд, то вычисление скоростей vкi и vнi и выбор vмаксi и vминi для ТС, находящихся на расстоянии Si от перекрестка, повторяют для времен tн3 и tк3, соответствующих следующему (по отношению к ранее рассмотренному) циклу переключения светофора, излучают со светофора радиосигналы, несущие информацию о vминi и vмаксi через интервалы времени τi=Si/vУЗ от момента излучения ответного УЗ-сигнала со светофора, на ТС принимают ответные УЗ- и радиосигналы, излучаемые от светофора, извлекают на ТС информацию о vминi и vмаксi, если моменты приема на ТС соответствующего УЗ- и радиосигнала совпадают, скорость ТС, находящегося на расстоянии Si от светофора, поддерживают в пределах от vминi до vмаксi.
Благодаря этим новым операциям скорости ТС регулируются так, что все они проезжают перекресток без задержки, что исключает скопление ТС перед перекрестками и снижает аварийность, тем самым повышая функциональную надежность способа.
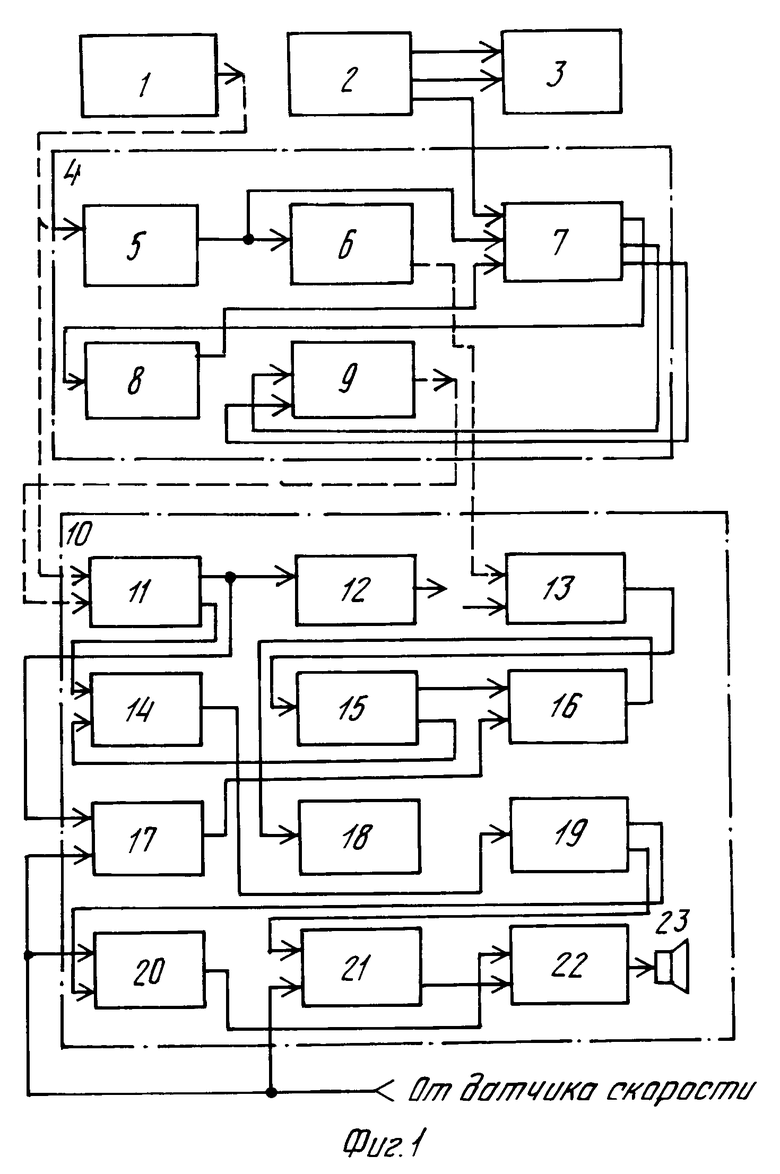
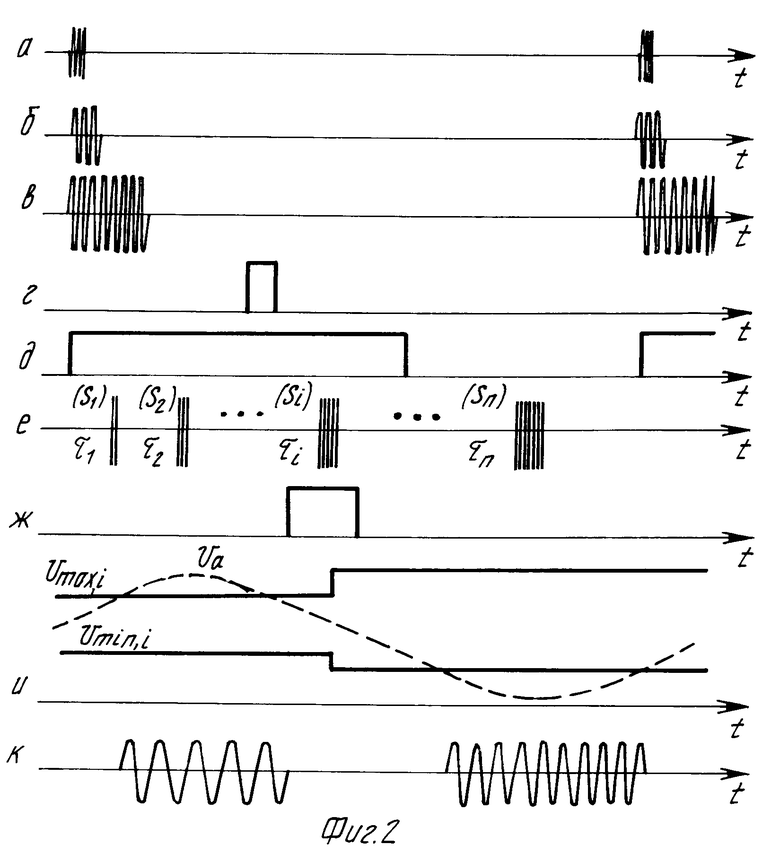
Структурная схема устройства для осуществления способа приведена на фиг.1; эпюры напряжений - на фиг.2.
Устройство содержит радиостанцию-запросчик 1, блок 2 управления светофором 3, связанный первым и вторым выходами со светофором 3, приемоответчик 4, располагаемый вблизи светофора 3 и содержащий радиоприемник 5, выход которого параллельно подсоединен к входу источника 6 УЗ-сигнала и второму входу адаптера 7, чей первый вход связан с третьим выходом блока 2 управления светофором, а третий вход - с выходом микрокомпьютера 8, вход которого соединен с первым выходом адаптера 7, чьи второй и третий выходы соответственно связаны с первым и вторым входами радиопередатчика 9, комплект 10 автомобиля, содержащий радиоприемник 11, первый выход которого параллельно подсоединен к входу источника 12 УЗ-сигнала и синхровходу ждущего мультивибратора 17, последовательно соединенные УЗ-приемник 13, элемент 15 распознавания по длительности, схему И 16 и исполнительный механизм 18, последовательно соединенные радиоприемник 11 (через второй выход), ключевую схему 14, демодулятор 19, схему 20 сравнения (через второй вход), генератор 22 предупредительного сигнала и динамик 23, причем второй выход демодулятора 19 через первый вход схемы 21 сравнения связан с вторым входом генератора 22 предупредительного сигнала, первый вход схемы 20 сравнения, второй вход схемы 21 сравнения и управляющий вход ждущего мультивибратора 17 параллельно подсоединены к выходу датчика скорости, выход ждущего мультивибратора 17 связан с вторым входом схемы И 16, второй выход элемента 15 распознавания соединен с вторым входом ключевой схемы 14.
Устройство работает следующим образом.
Радиостанция-запросчик 1 с интервалом ≈1 с излучает радиоимпульсы (фиг. 2а). На комплект 10 автомобиля эти радиоимпульсы принимает радиоприемник 11 и по импульсу с его первого выхода источник 12 УЗ-сигнала излучает УЗ-импульс ответа автомобиля (фиг. 2б). Одновременно радиоимпульс запроса принимает радиоприемник 5 из состава приемоответчика 4, и по его выходному сигналу источник 6 УЗ-сигнала излучает УЗ-импульс ответа приемоответчика 4 (фиг. 2в), отличающийся по длительности от УЗ-импульса автомобиля. Ответные УЗ-импульсы (фиг. 2б), излученные другими автомобилями, принимаются на комплекте 10 данного автомобиля с помощью УЗ-приемника 13 и проходят элемент 15 распознавания по длительности, короткий видеоимпульс с первого выхода которого (фиг. 2г) поступает на первый вход схемы И 16. На второй ее вход подается импульс от ждущего мультивибратора 17, управляемого по длительности от датчика скорости автомобиля и запускаемого импульсом с первого выхода радиоприемника 11 в момент запроса (фиг. 2д). Положение импульса (фиг. 2г) относительно момента запроса (измеренный временной интервал) в данном случае находится внутри минимально допустимого интервала (фиг. 2д), схема И 16 открывается, в результате чего исполнительный механизм 18 получает команду на снижение скорости автомобиля. Так осуществляется предупреждение столкновений и наездов. Для предотвращения скопления ТС около перекрестков микрокомпьютер 8 через адаптер 7 в приемоответчике 4 получает сигнал о приходе радиоимпульса запроса с радиоприемника 5, а также информацию о временах переключения разрешающего и запрещающего сигналов с блока 2 управления светофором 3, который непосредственно воздействует на светофор 3. Используя свойство периодичности переключения светофора, микрокомпьютер 8 рассчитывает для каждого периода от запроса до запроса время до начала tн3 и конца tк3 действия ближайшего по времени разрешающего сигнала светофора. Кроме того, в память компьютера 8 заложены значения ряда расстояний S1... Si. ..Sn, охватывающих сферу действия его светофора, и, используя это, компьютер вычисляет ряд моментов τ1...τi...τn по формуле τi=Si/vУЗ , где vУЗ - скорость ультразвука (их также можно хранить в памяти). Для каждого такого момента τi он также подсчитывает скорости vнi=Si/tн3 и vкi=Si/tк3, необходимые для пересечения перекрестка под разрешающий сигнал светофора ТС, находящимся на расстоянии Si от него, сравнивает их с заложенной в его память предельно допустимой скоростью движения vд на перегоне перед перекрестком и выбирает минимальную vминi и максимальную vмаксi скорости, обеспечивающие проезд перекрестка под разрешающий сигнал светофора с расстояния Si. При этом действует следующая логика: если vнi < vд и vкi < vд, то vминi = vкi; vмаксi = vнi;
если vнi≥vд и vкi < vд, то vминi = vкi и vмаксi = vд.
Если vнi≥vд и vкi≥vд, то вычисление скоростей vкi и vнi и выбор vмаксi и vминi для ТС, находящихся на расстоянии Si от перекрестка, повторяют для других времен tн3 и tк3, соответствующих следующему по отношению к ранее рассмотренному циклу переключения светофора.
Полученные микрокомпьютером 8 значения скоростей vминi и vмаксi в моменты времени τi через адаптер 7 передаются на радиопередатчик 9, радиосигнал которого подвергается двойной модуляции, например, значением vминi по частоте, а значением vмаксi по длительности импульса. Этот сигнал (фиг. 2е) излучается в момент τi в направлении автомобиля, где он принимается радиоприемником, причем вследствие отличия частот он поступает на второй выход. Для выбора автомобиля, находящегося на расстоянии Si от перекрестка, используется низкая скорость распространения ультразвука, излученного источником 6 УЗ-сигнала (фиг. 2в). Этот сигнал, пройдя расстояние Si, оказывается принятым УЗ-приемником 13 автомобиля как раз в тот момент τi=Si/vуз (фиг. 2 ж), когда его же радиоприемником 11 принят соответствующий расстоянию Si радиосигнал (фиг.2е в момент τi ). Продетектированный приемником 13 и опознанный по длительности элементом 15 сигнал (фиг. 2ж) открывает ключевую схему 14, которая пропускает в момент τi радиосигнал от приемника 11 на демодулятор (с расширением импульсов) 19, на первом выходе которого действует потенциал, пропорциональный скорости vмаксi, а на втором - vминi (фиг. 2и). Эти потенциалы поступают соответственно на второй вход схемы 20 сравнения и первый вход схемы 21 сравнения. Соответственно на первый вход схемы 20 сравнения и второй вход схемы 21 сравнения подается сигнал от датчика скорости (пунктир на фиг. 2и). Выходные сигналы со схем 20 и 21 сравнения воздействуют на генератор 22 предупредительного сигнала, которым вырабатывается низкочастотный сигнал, если скорость автомобиля выше рекомендуемой максимальной скорости vмаксi, или более высокочастотный сигнал, если автомобиль имеет скорость ниже рекомендуемой минимальной vминi (фиг. 2к). Эти сигналы через динамик 23 сообщаются водителю, который, стремясь сократить их звучание, выдерживает скорость в пределах между vмаксi и vминi. Это обеспечивает проезд автомобиля под разрешающий сигнал светофора без ожидания перед перекрестками.
Предлагаемое техническое решение обеспечивает по сравнению с прототипом повышение функциональной надежности вследствие снижения аварийности на перекрестках, поскольку скопление транспорта перед ними часто служит причиной наездов сзади, а также травматизма и смерти пешеходов, экономию горючего (до 20%) вследствие перехода от "городского цикла" езды, сопровождающегося частыми остановками и ускорениями, к безостановочному движению, улучшение экологической обстановки в городах в результате снижения числа остановок и ускорений, сопровождающихся повышенным выделением вредных газов.
Изобретение относится к автоматике и может быть использовано для управления движением транспортных средств - автомобилей, автобусов, мотоциклов и др. главным образом в городских условиях. Цель изобретения - повышение функциональной надежности способа. Цель достигается тем, что запросный радиосигнал принимают на светофоре, расположенном на управляемом перекрестке, излучают со светофора ответные ультразвуковые сигналы, вычисляют на перекрестке скорости движения транспортных средств, находящихся на расстоянии S1...Si...Sn, Vнi=Vi/tнз; Vкi=Si/tкз необходимые для пересечения транспортным средством перекрестка соответственно в момент tнз начала и tкз конца действия ближайшего по времени разрешающего сигнала светофора, сравнивают скорости Vнi и Vкi с предельно допустимой скоростью движения Vд на перегоне перед перекрестком, если Vнi<Vд и Vкi<Vд , то выбирают для транспортных средств, находящихся на расстоянии Si от перекрестка, соответственно миниммальную и максимальую скорости движения Vминi=Vкi и Vмаксi=Vнi, если Vнi≥ Vд и Vкi<Vд, то Vминi=Vкi; Vмакс=Vд, если Vнi≥ Vд и Vкi≥ Vд, то вычисление скоростей Vкi и Vнi и выбор Vмаксi и Vминi для транспортных средств, находящихся на расстоянии Si от перекрестка, повторяют для времени tнз и tкз, соответствующие следующему (по отношению к ранее рассмотренному) циклу переключения светофора, излучают со светофора радиосигналы, несущие информацию о Vминi и Vмаксi через интервалы времени τi=Si/Vнз от момента излучения ответного ультразвукового сигнала со светофора, на транспортных средствах принимают ответные ультразвуковые и радиосигнал, излучаемые от светофора, извлекают на транспортных средствах информацию о Vминi и Vмаксi, если моменты приема на транспортном средстве соответствующего ультразвукового и радиосигнала совпадают, скорость транспортного средства, находящегося на расстоянии Si от светофора, поддерживают в пределах от Vминi до Vмаксi. 2 ил.
СПОСОБ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ АВТОМОБИЛЕЙ, основанный на излучении запросного радиосигнала, приеме его на транспортных средствах, излучении с транспортных средств ответных ультразвуковых сигналов, приеме на транспортных средствах ответных ультразвуковых сигналов, измерении на транспортных средствах временных интервалов между моментами приема запросного радио- и ответных ультразвуковых сигналов, сравнении измеренных временных интервалов с минимально допустимыми, уменьшении скорости транспортного средства, если измеренный временной интервал меньше минимально допустимого, отличающийся тем, что, с целью повышения функциональной надежности способа, запросный радиосигнал принимают на светофоре, расположенном на управляемом перекрестке, излучают со светофора ответные ультразвуковые сигналы, вычисляют на перекрестке скорости движения транспортных средств, находящихся на расстоянии S1...Si...Sn, Vнi = Si/tн3, Vki = Si/tk3, необходимые для пересечения транспортным средством перекрестка соответственно в момент tн3 начала и tк3 конца действия ближайшего по времени разрешающего сигнала светофора, сравнивают скорости Vнi и Vki с предельно допустимой скоростью движения Vд на перегоне перед перекрестком, если Vнi < Vд и Vкi < Vд, то выбирают для транспортных средств, находящихся на расстоянии Si от перекрестка, соответственно минимальную и максимальную скорости движения Vmini = Vкi и Vmaxi = Vнi, если Vнi ≥ Vд и Vкi < Vд, то Vmini = Vki и Vmaxi = Vд, если Vнi ≥ Vд и Vкi ≥ Vд , то вычисление скоростей Vкi и Vнi и выбор Vmaxi и Vmini для транспортных средств, находящихся на расстоянии Si от перекрестка, повторяют для времени tн3 и tк3, соответствующих следующему (по отношению к ранее рассмотренному) циклу переключения светофора, излучают со светофора радиосигналы, несущие информацию о Vmini и Vmaxi через интервалы времени τi = Si / Vуз от момента излучения ответного ультразвукового сигнала со светофора, на транспортных средствах принимают ответные ультразвуковые и радиосигнал, излучаемые со светофора, извлекают на транспортных средствах информацию о Vmini и Vmaxi, если моменты приема на транспортном средстве соответствующего ультразвукового и радиосигнала совпадают, скорость транспортного средства, находящегося на расстоянии Si от светофора, поддерживают в пределах от Vmini до
| Способ предупреждения столкновений подвижных объектов | 1974 |
|
SU511596A1 |
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
