Изобретение относится к области приборостроения, в частности к преобразователям механических величин в электрические сигналы.
Известны преобразователи механических величин, например, угла поворота, скорости вращения и т.д. в электрический сигнал. Для повышения точности преобразования в таких устройствах применяют различные меры, в том числе, используют синусные обмотки, обеспечивающие наилучшее из известных способов приближение кривой выходных сигналов к синусоиде (т.е. наименьший коэффициент гармоник в выходном сигнале).
Недостатком известных устройств является ограниченная точность формирования выходного сигнала при заданном числе пазов на якоре (и индукторе).
Целью данного предложения является повышение точности формирования выходного сигнала за счет уменьшения коэффициента гармоник.
Указанная цель достигается за счет того, что в преобразователе, содержащем индуктор и якорь, в пазах которого размещена обмотка, пазы на полюсном делении τ якоря вдоль расточки расположены неравномерно, с шагом, пропорциональным значению корня квадратного из абсолютной величины  а числа витков в секциях обмотки распределены пропорционально корню квадратному из абсолютной величины
а числа витков в секциях обмотки распределены пропорционально корню квадратному из абсолютной величины  причем взаимная фазировка секций, включенных последовательно в обмотку, определяется знаком
причем взаимная фазировка секций, включенных последовательно в обмотку, определяется знаком  при этом индуктор выполнен с пазами, расположенными на полюсном делении τ с шагом, пропорциональным корню квадратному из абсолютной величины
при этом индуктор выполнен с пазами, расположенными на полюсном делении τ с шагом, пропорциональным корню квадратному из абсолютной величины  причем в пазах размещены секции обмотки, числа витков в которых распределены пропорционально корню квадратному из абсолютной величины
причем в пазах размещены секции обмотки, числа витков в которых распределены пропорционально корню квадратному из абсолютной величины  . Кроме того, якорь и индуктор выполнены из m расположенных по оси преобразователя пакетов, развернутых в пространстве относительно друг друга на угол, соответствующий углу сдвига фаз выходных сигналов.
. Кроме того, якорь и индуктор выполнены из m расположенных по оси преобразователя пакетов, развернутых в пространстве относительно друг друга на угол, соответствующий углу сдвига фаз выходных сигналов.
На фиг.1 в качестве наиболее простого примера показан условно однофазный двухполюсный преобразователь скорости вращения в электрический сигнал, выполненный на синхронном генераторе, где обозначено: 1 - пакет якоря, 2 - индуктор, который может быть выполнен в виде постоянного магнита, либо со сосредоточенной обмоткой возбуждения (в этом случае обмотка закладывается в пазы индуктора), 3-12 - пазы якоря. Пазы расположены с шагом, пропорциональным величине  паз 4 смещен по отношению к пазу 3 на угол 23,6°
паз 4 смещен по отношению к пазу 3 на угол 23,6° 
паз 5 смещен по отношению паза 4 на угол 26,5° 
паз 6 относительно оси У смещен на угол ≈40° 
паз 7 относительно паза 6 смещен на угол 26,5°  паз 8 относительно паза 7 смещен на угол 23,6°
паз 8 относительно паза 7 смещен на угол 23,6°  и т.д. Секция обмотки имеет число витков wi, пропорциональное величине
и т.д. Секция обмотки имеет число витков wi, пропорциональное величине  так, число витков в секции, размещенной в пазах 3-8, пропорционально величине 0,42
так, число витков в секции, размещенной в пазах 3-8, пропорционально величине 0,42  число витков в секции, размещенной в пазах 4-9 (и 7-12), пропорционально величине 0,4
число витков в секции, размещенной в пазах 4-9 (и 7-12), пропорционально величине 0,4  число витков в секции, размещенной в пазах 5-10 (и 6-11), пропорционально величине 0,33
число витков в секции, размещенной в пазах 5-10 (и 6-11), пропорционально величине 0,33  Секции, расположенные в пазах 3-8, 4-9, 5-10, включены согласно, а секции, расположенные в пазах 6-11, 7-12, - встречно, поскольку знак cosx для первых из них положительный, а для двух последних - отрицательный.
Секции, расположенные в пазах 3-8, 4-9, 5-10, включены согласно, а секции, расположенные в пазах 6-11, 7-12, - встречно, поскольку знак cosx для первых из них положительный, а для двух последних - отрицательный.
На фиг.2 показаны напряжения, наводящиеся в секциях обмотки (U1÷U5), и выходное (Uвых) (суммарное) напряжение преобразователя при вращении индуктора, для упрощения принято, что напряжение в секциях имеет прямоугольную форму.
При вращении индуктора против часовой стрелки, начиная от исходного положения, показанного на фиг.1, в секциях обмотки наводятся напряжения, имеющие сдвиг фаз, пропорциональный величине  т.е. соответствующий шагу (расположению) пазов, что и показано на фиг.2. Суммарное (с учетом знака cosx) напряжение имеет ступенчатую форму, которую можно рассматривать как аппроксимирующую кривую синусоиды. Отметим, что при таком выполнении якоря (т.е. указанном расположении пазов и выборе чисел витков в секциях обмотки) узлы аппроксимации (точки пересечения кривых) располагаются на серединах вертикальных и горизонтальных участков аппроксимирующей кривой. При этом оказывается, что среднеквадратическая ошибка аппроксимации (определяющая коэффициент гармоник) получается минимально возможной.
т.е. соответствующий шагу (расположению) пазов, что и показано на фиг.2. Суммарное (с учетом знака cosx) напряжение имеет ступенчатую форму, которую можно рассматривать как аппроксимирующую кривую синусоиды. Отметим, что при таком выполнении якоря (т.е. указанном расположении пазов и выборе чисел витков в секциях обмотки) узлы аппроксимации (точки пересечения кривых) располагаются на серединах вертикальных и горизонтальных участков аппроксимирующей кривой. При этом оказывается, что среднеквадратическая ошибка аппроксимации (определяющая коэффициент гармоник) получается минимально возможной.
Действительно минимум величины

можно найти, продифференцировав указанное выражение по xn и xn*.
В результате подучим

или 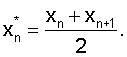
Разложение в ряд Фурье кривой Uвых дает следующий результат:
Uвых=Um(sinx-0,015sin3x-0,02sin5x+0,027sin7x-0,024sin9x-
-0,019sin11x+0,064sin13x+0,038sin15x+0,015sin17x+
+0,003sin19x-0,011sin23x-0,016sin25x+...)
Коэффициент гармоник кг≈9,5%. Коэффициент гармоник в выходном напряжении известного преобразователя с 10 равномерно расположенными пазами и синусной обмоткой равен ≈16%.
Отметим, что приведенное на фиг.2 кривая будет определять форму огибающей выходного напряжения преобразователя угла, если обмотку возбуждения (расположенную в пазах индуктора) запитать переменным током повышенной частоты.
Для улучшения формы выходного напряжения целесообразно и форму огибающей намагничивающей силы, создаваемой обмоткой возбуждения, приблизить к синусоиде. Для этого индуктор выполняется с пазами, которые располагаются с шагом, пропорциональным значению  а обмотка выполняется из секций, числа витков в которых выбираются пропорциональными величине
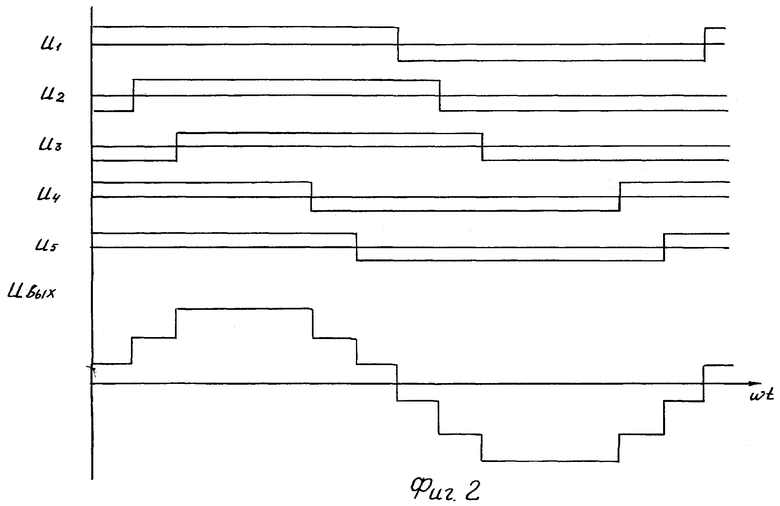
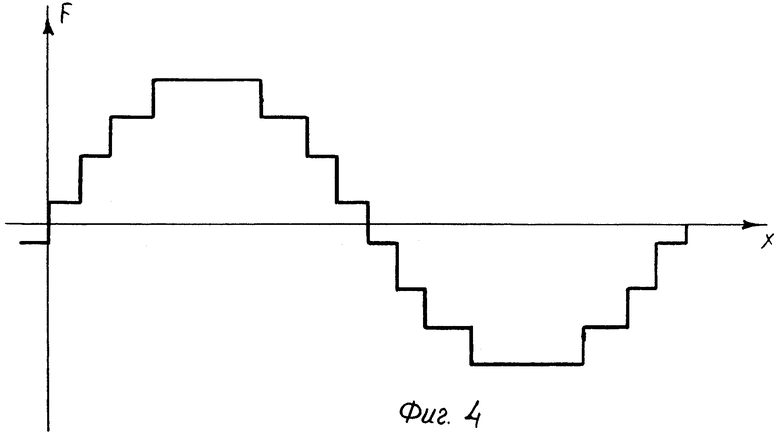
а обмотка выполняется из секций, числа витков в которых выбираются пропорциональными величине  т.е. индуктор выпоняется аналогично якорю преобразователя. Для уменьшения влияния гармоник индуктора на выходное напряжение число пазов в индукторе и якоре выбирают неодинаковым. На фиг.3 представлен индуктор с 14 пазами, а на фиг.4 - огибающая намагничивающей силы (F).
т.е. индуктор выпоняется аналогично якорю преобразователя. Для уменьшения влияния гармоник индуктора на выходное напряжение число пазов в индукторе и якоре выбирают неодинаковым. На фиг.3 представлен индуктор с 14 пазами, а на фиг.4 - огибающая намагничивающей силы (F).
Разложение в ряд Фурье огибающей дает следующий результат:
F=Fm(sinx+0,006sin3x-0,01sin5x+0,013sin7x-0,015sin9x+
+0,012sin11x+0,002sin13x-0,021sin15x+0,028sin17x+0,059sin19x+
+0,028sin21x+0,008sin23x+0,007sin25x+...)
Коэффициент гармоник кг≈8%. Синусная обмотка, размещенная в 12 равномерно расположенных пазах, обеспечивает коэффициент гармоник кг=13,5%.
Таким образом, предложенная конструкция преобразователя существенно улучшает форму выходного напряжения и намагничивающей силы по сравнению о известными конструкциями.
В целях получения многофазного (например, двухфазного) выхода используются два (в общем случае - m) пакета якоря с обмоткой (и при необходимости, два индуктора с обмоткой), которые размещают на оси с угловым сдвигом в 90° для двухполюсного преобразователя (или в 45° - для четырехполюсного и т.д.).
Источники информации
Ю.М.Пульер, Ю.А.Колесов, Э.Н.Асиновский, Индукционные электромеханические функциональные преобразователи "Энергия", М., 1969 г., стр.46, рис.3-4.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЯКОРЬ ЭЛЕКТРИЧЕСКОЙ МАШИНЫ ПЕРЕМЕННОГО ТОКА | 1979 |
|
SU1839915A1 |
| Электромеханический преобразователь | 1980 |
|
SU903936A1 |
| Электромеханический преобразователь | 1980 |
|
SU930331A1 |
| ПРЕОБРАЗОВАТЕЛЬНЫЙ ТРАНСФОРМАТОР | 2008 |
|
RU2353014C1 |
| СИНУСНАЯ ОБМОТКА ЭЛЕКТРИЧЕСКОЙ МАШИНЫ | 1991 |
|
RU2013845C1 |
| СИНХРОННАЯ МАШИНА С СОВМЕЩЕННЫМ МНОГОФУНКЦИОНАЛЬНЫМ БЕСЩЕТОЧНЫМ ВОЗБУДИТЕЛЕМ | 1994 |
|
RU2095923C1 |
| ПОЛЮСНЫЙ БАШМАК ЭЛЕКТРИЧЕСКИХ МАШИН ПОСТОЯННОГО И ПЕРЕМЕННОГО ТОКОВ ДЛЯ СИНУСОИДАЛЬНОГО РАСПРЕДЕЛЕНИЯ МАГНИТНОГО ПОТОКА НА ПОВЕРХНОСТИ ЯКОРЯ | 1922 |
|
SU4299A1 |
| ЭЛЕКТРИЧЕСКАЯ МАШИНА | 1998 |
|
RU2131637C1 |
| МНОГОХОДОВАЯ ПЕТЛЕВАЯ ОБМОТКА ЯКОРЯ ДЛЯ БЕСПАЗОВЫХ МАШИН ПОСТОЯННОГО ТОКА | 1994 |
|
RU2122270C1 |
| ТРАНСФОРМАТОР ИНВЕРТОРА | 2001 |
|
RU2192065C1 |
Изобретение относится к области приборостроения, в частности к преобразователям механических величин в электрические сигналы. Преобразователь содержит индуктор и якорь, в пазах которого размещена обмотка. Пазы на полюсном делении τ якоря вдоль расточки расположены неравномерно с шагом  а числа витков распределены по пазам пропорционально величине
а числа витков распределены по пазам пропорционально величине  причем взаимная фазировка секций, включенных последовательно в обмотку, определяется знаком
причем взаимная фазировка секций, включенных последовательно в обмотку, определяется знаком  . Техническим результатом является повышение точности формирования выходного сигнала. 4 ил.
. Техническим результатом является повышение точности формирования выходного сигнала. 4 ил.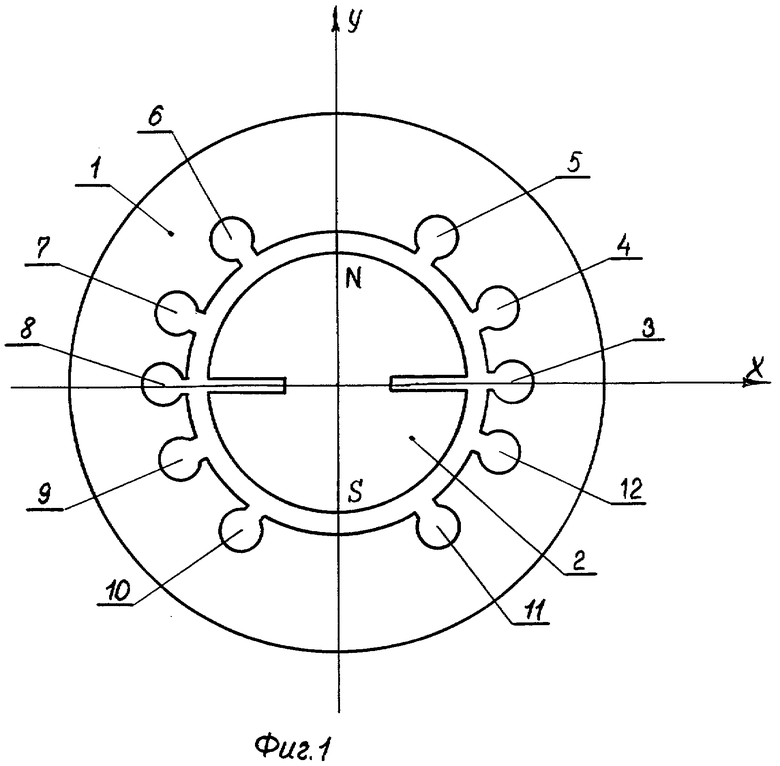
Электромеханический преобразователь, содержащий ротор и статор, в пазах которого размещена неравносекционная обмотка, отличающийся тем, что, с целью повышения точности формирования выходного сигнала за счет уменьшения коэффициента гармоник, пазы на каждой половине полюсного деления расположены неравномерно с угловым шагом
а числа витков распределены по пазам пропорционально величине  причем секции, для которых знак cosxn>0 включены в обмотку согласно, а секции, для которых знак cosxn<0 - встречно, при этом
причем секции, для которых знак cosxn>0 включены в обмотку согласно, а секции, для которых знак cosxn<0 - встречно, при этом
 - угловая координата n-го паза, отсчитанная от середины полюсного деления х1=0,
- угловая координата n-го паза, отсчитанная от середины полюсного деления х1=0,
Кα - коэффициент пропорциональности,
Z - число пазов,
τ - полюсное деление.

