Данное изобретение относится к области радиотехники и может быть использовано в радиотехнических системах связи с шумоподобными сигналами.
Известны устройства поиска шумоподобных сигналов, описанные в книгах: ″Шумоподобные сигналы в системах передачи информации″. Под редакцией В.Б.Пестрякова. М.: "Советское радио", 1973. "Статистическая теория приема сложных сигналов". Тузов Г.И. М.: "Советское радио", 1977. "Системы связи с шумоподобныма сигналами" Н.Т.Петрович, М.К.Разглахнин. М.: "Советское радио", 1969.
В авторских свидетельствах:
Аппаратура для передачи дискретной информации. Авторское свидетельство №300946.
Устройство для обеспечения случайного поиска псевдошумовых сигналов по задержке".
Авторское свидетельство №264489, класс 21а6 60.
Устройство поиска псевдошумовых сигналов. Авторское свидетельство №614543.
Сидящий приемник шумоподобных сигналов с многоканальным устройством поиска. Авторское свидетельство №439928.
Для обработки шумоподобных сигналов на приемной стороне используются псевдослучайные последовательности (ПСП), совпадающие по кодовой структуре с видео-ПСП передающего устройства. В случае использования в шумоподобном сигнале пилот- и информационных псевдослучайных последовательностей в приемном устройстве осуществляется режим вхождения в синхронизм по пилот-сигналу, а затем по информационному сигналу.
Известно, что в режиме поиска сигнала с выхода корреляционных каналов в решающем устройстве сравнивается с пороговым сигналом и что обнаружение шумоподобного сигнала с использованием пилот- и информационных сигналов в известных устройствах происходит с потерями в 3 дБ.
Для уменьшения вероятности пропуска ложного обнаружения необходимо увеличить время накопления сигнала.
Время поиска шумоподобного сигнала при больших базах пилот- и информационных сигналов будет соответственно большим даже при использовании многоканального корреляционного устройства поиска.
Нами предлагается многоканальное устройство поиска шумоподобного сигнала, которое позволяет повысить помехозащищенность поиска до 3 дБ с незначительным увеличением времени поиска. Прототипом предлагаемого устройства является "Устройство поиска щумоподобного сигнала" (авторы Козленко Н.И., Сидоренко Г.Г.).
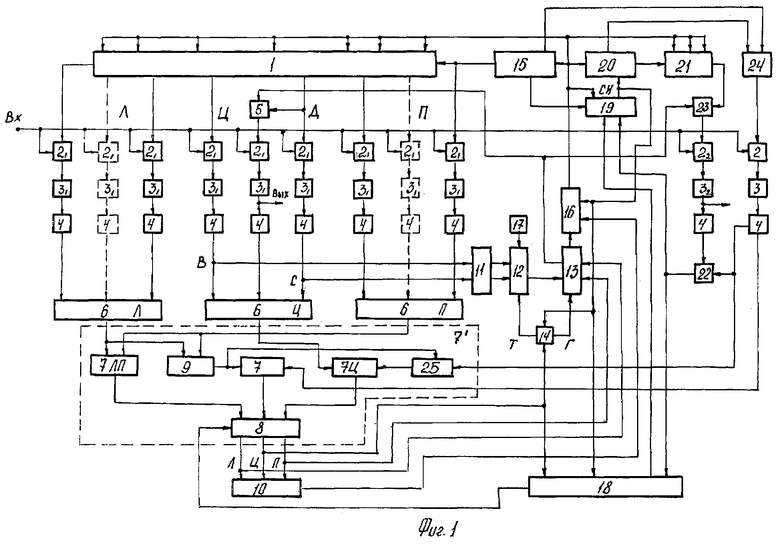
На фиг.1 показана блок-схема прототипа.
Устройство (прототип) содержит:
1 и 21 - регистры сдвига,
2, 21, 22 - перемножитель,
3, 31, 32 - интегратор,
4 - амплитудный детектор,
5 и 23 - сдвигающие триггеры,
6Л, 6Ц и 6П - схема выбора максимальных значений сигналов,
7' - двухпороговую решающую схему, которая в качестве примера может содержать:
а) схему выбора максимального значения сигнала левой и правой групп (9);
б) схему сравнения максимального значения сигнала левой и правой групп корреляционных каналов со значением порогового сигнала, равным Uпор.1, обеспечивающего минимальную вероятность пропуска сигнала (7);
в) схему сравнения максимальных значений сигналов левой и правой групп корреляционных каналов (7ЛП);
г) схему выбора максимального значения сигнала между выбранным максимальным значением сигнала левой и правой групп корреляционных каналов с пороговым (25);
д) схему сравнения максимального значения сигнала центральной группы корреляционных каналов со значением сигнала выбранного схемой выбора максимального значения сигнала между выбранным максимальным значением сигнала левой и правой групп, корреляционных каналов и пороговым значением, равным Uпор.2 (7Ц);
е) устройство, состоящее из схемы совпадения, обеспечивающих выдачу команд нахождения максимального сигнала в левой, в правой или центральной группах корреляционных каналов соответственно (8),
10 - сумматор,
11 - схема сравнения,
12 - управляемый делитель точной дискретной системы ФАП,
13 - управляемый делитель грубой дискретной системы ФАЛ,
14 - устройство управления работой, точной и грубой, систем ФАП,
15 - генератор псевдослучайной последовательности (ГПСП) пилот-сигнала,
16 - схема управления перестройкой ГПСП,
17 - опорный генератор,
18 - схема принятия решения,
19 - устройство фазирования по задержке генератора ПСП информационного сигнала,
20 - генератор псевдослучайной последовательности информационного сигнала.
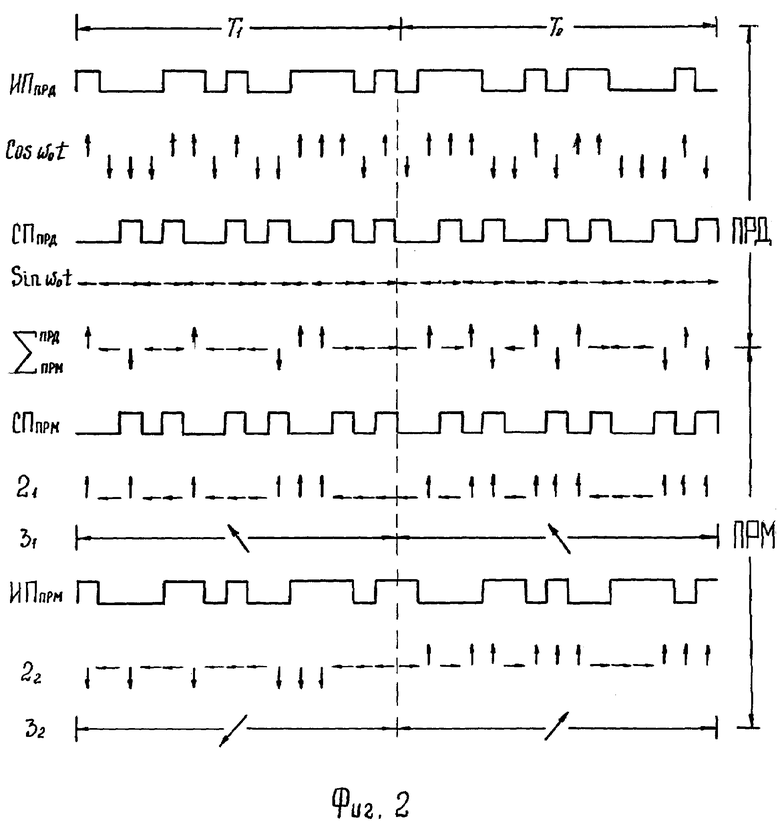
В основу данного устройства (прототипа) положена многоканальная параллельно-последовательная система поиска шумоподобного сигнала,  сформированного согласно фиг.2 - ПРД, при которой поисковые корреляционные каналы пилот-сигнала распределены на три группы таким образом, что на входа корреляторов первой (левой) и третьей (правой) групп поступают опорные ПСП, сдвинутые друг относительно друга на τ0 (τ0 - длительность элементарной посылки ПСП), на входы корреляторов второй (центральной) группы поступают опорные ПСП, сдвинутые друг относительно друга на τ0/2, а сдвиг опорных ПСП, поступающих на рядом стоящие корреляторы первой и второй, второй и третьей групп, равен τ0.
сформированного согласно фиг.2 - ПРД, при которой поисковые корреляционные каналы пилот-сигнала распределены на три группы таким образом, что на входа корреляторов первой (левой) и третьей (правой) групп поступают опорные ПСП, сдвинутые друг относительно друга на τ0 (τ0 - длительность элементарной посылки ПСП), на входы корреляторов второй (центральной) группы поступают опорные ПСП, сдвинутые друг относительно друга на τ0/2, а сдвиг опорных ПСП, поступающих на рядом стоящие корреляторы первой и второй, второй и третьей групп, равен τ0.
Устройство (прототип) работает следующим образом.
Входной шумоподобный сигнал  с выхода высокочастотного тракта приемного устройства подается на входы перемножителей корреляционных каналов. На вторые входы перемножителей корреляционных каналов обнаружения пилот-сигнала (кроме центральной группы) поступают опорные видео-ПСП с регистра сдвига 1, сдвинутые друг относительно друга по времени на длительность элементарного импульса τ0. При этом опорные ПСП, подаваемые на перемножители 2 центральной группы корреляционных каналов, сдвинуты друг относительно друга на τ0/2 с помощью сдвигающего триггера 5, управляемого тактовыми импульсами, сдвинутыми по времени на τ0/2 относительно тактовых импульсов, подаваемых на генератор ПСП-15 и регистр сдвига 1 со схемы управляемого делителя грубой дискретной системы ФАП-13. На второй вход перемножителя 22 корреляционного канала обнаружения информационного сигнала поступает опорная видео-ПСП с регистра сдвига 21, причем фазированне по задержке с видео-ПСП пилот-сигнала центрального канала корреляторов центральной группы осуществляется сдвигающим триггером 23, на второй вход которого поступают сдвинутые тактовые импульсы со схемы управляемого делителя грубой дискретной системы ФАП-13. На второй вход перемножителя - 2 порогового корреляционного канала поступает опорная видео-ПСП с сумматора по модулю два - 24, на вход которого поступают две видео-ПСП - пилот- и информационных сигналов. С ГПСП-15 и 20 сигналы, подаваемые на вход сумматора по модулю два - 24, должны быть сдвинуты по времени относительно видео-ПСП, подаваемых на регистры сдвига 1 и 21, так, чтобы обеспечить минимальную корреляционную зависимость между сигналом порогового корреляционного канала и сигналами пилот- и информационного корреляционного канала.
с выхода высокочастотного тракта приемного устройства подается на входы перемножителей корреляционных каналов. На вторые входы перемножителей корреляционных каналов обнаружения пилот-сигнала (кроме центральной группы) поступают опорные видео-ПСП с регистра сдвига 1, сдвинутые друг относительно друга по времени на длительность элементарного импульса τ0. При этом опорные ПСП, подаваемые на перемножители 2 центральной группы корреляционных каналов, сдвинуты друг относительно друга на τ0/2 с помощью сдвигающего триггера 5, управляемого тактовыми импульсами, сдвинутыми по времени на τ0/2 относительно тактовых импульсов, подаваемых на генератор ПСП-15 и регистр сдвига 1 со схемы управляемого делителя грубой дискретной системы ФАП-13. На второй вход перемножителя 22 корреляционного канала обнаружения информационного сигнала поступает опорная видео-ПСП с регистра сдвига 21, причем фазированне по задержке с видео-ПСП пилот-сигнала центрального канала корреляторов центральной группы осуществляется сдвигающим триггером 23, на второй вход которого поступают сдвинутые тактовые импульсы со схемы управляемого делителя грубой дискретной системы ФАП-13. На второй вход перемножителя - 2 порогового корреляционного канала поступает опорная видео-ПСП с сумматора по модулю два - 24, на вход которого поступают две видео-ПСП - пилот- и информационных сигналов. С ГПСП-15 и 20 сигналы, подаваемые на вход сумматора по модулю два - 24, должны быть сдвинуты по времени относительно видео-ПСП, подаваемых на регистры сдвига 1 и 21, так, чтобы обеспечить минимальную корреляционную зависимость между сигналом порогового корреляционного канала и сигналами пилот- и информационного корреляционного канала.
В каждом корреляционном канале (см. фиг.2 ПРМ) с помощью перемножителя 2, 21 и 22 интеграторе 3, 31 и 32 и амплитудного детектора 4 вычисляется взаимокорреляционная функция между входным сигналом  и видео-ПСП пилот-, информационного и порогового сигналов соответственно.
и видео-ПСП пилот-, информационного и порогового сигналов соответственно.
Результат вычисления корреляционных каналов обнаружения пилот-сигнала поступает на схемы выбора максимальных значений 6Л, 6Ц и 6П, где осуществляется выбор максимального сигнала корреляционных каналов соответствующих групп.
Со схем 6Л, 6П и 6Ц максимальные сигналы поступают на двухпороговую решающую схему, в которой осуществляется выбор максимального сигнала с учетом того, что для левой и правой групп пороговое значение сигнала равно Uпор.1, а для центральной группы Uпор.2,причем Uпор.1<Uпор.2.
Значение и соотношения между пороговым сигналами Uпор.1 и Uпор.2 выбираются из условия минимальной вероятности пропуска и минимальной вероятности ложного обнаружения.
Сначала рассмотрим случай, когда максимальные значения сигналов меньше соответствующих пороговых значений в двух пороговой решающей схеме. В этом случае на выходах схемы 7': 7'Л, 7'Ц и 7'П, а следовательно, и на выходе схемы объединения 10, сигнал отсутствует.
Поэтому схема управления 14 переключением управляемых делителей ФАП-12, ФАП-13 находится в исходном состоянии, при котором с выхода Г схемы 14 подается сигнал подготовки схемы 13 к работе, при условии поступления на вход схемы 14 стробирующего импульса с выхода СИ, вырабатываемого устройством фазирования по задержке 19 в течение одного периода информационной ПСП. Схема принятия решения 18 находится в исходном состоянии и не выдает запрещающего сигнала на устройство 8 и на схему фазирования по задержке 19 генератора ПСП-20, при этом со схемы объединения 10 на схему управления по задержке 16, при условии поступления с выхода схемы 19 стробирующего импульса, подается команда на продолжение поиска.
Во время поступления команды продолжения поиска на вход схемы 16, тактовые импульсы с выхода которой "вырезаются" таким количеством, чтобы опорные ПСП пилот-сигнала, поступающие на входы перемножителей 2, сдвинулись на время τ0(m-1) относительно ПСП, генерируемых до поступления команды на продолжение поиска в момент действия стробирующего импульса СИ.
Таким образом, осуществляется параллельно-последовательный поиск шумоподобного пилот-сигнала на всех временных позициях существования ПСП пилот-сигнала.
Если максимальное значение сигнала больше соответствующего порогового значения в двухпороговой решающей схеме, и сигнал появится на выходах устройства 7': 7'Л или 7'П, а следовательно, и на выходе схемы 10. Так как на выходе 7'Ц сигнал отсутствует, то схемы 13, 14 и 18 находятся в исходном состоянии, описанном выше.
При появлении сигнала на входе схемы 16 с выхода схемы 10 схема 16 не вырабатывает команды на продолжение поиска для ГПСП-15.
Если на выходе 7'Л или 7'П двухпороговой решающей схемы появится сигнал, то делители грубой дискретной системы ФАП-13 укорачивают или удлиняют период опорных ПСП на τ0 при условии поступления стробирующего импульса на вход схемы 14 (а следовательно, на вход схемы ФАП-13 с выхода Г схемы 14) до тех пор, пока не появится сигнал на выходе схемы 7'Ц, а на выходах 7'Л или 7'П сигнал пропадет.
Синхронно с ГПСП-15 перестраивается и ГПСП-20 во время поиска и обнаружения шумоподобного сигнала.
При появлении сигнала на выходе 7'Ц схема управления 14 включает схему управляемого делителя точной дискретной системы ФАП-13 путем переключения сигнала с выхода Г на выход Т схемы 14 в момент появления стробирующего импульса на другом входе схемы 14 с выхода СИ схемы 19.
Появление сигнала на выходе 7'Ц также включает устройство принятия решения 18, на другой вход которого поступают стробирующие импульсы с выхода СИ схемы 19. С выхода схемы 18 на вход схемы 19 при появлении сигнала на выходе 7'Ц подается команда на продолжение поиска информационного сигнала.
Таким образом, на первом этапе осуществляется параллельно-последовательный поиск структуры ПСП пилот-сигнала, при котором принятие решения о его обнаружении производятся за время, равное периоду информационной структуры ПСП.
Далее начинается последовательный поиск шумоподобного информационного сигнала, база которого (В1) больше базы (B2) пилот-сигнала, корреляционным каналом информации путем удлиннения периода видео-ПСП канала информации на один период Тγ видео-ПСП пилот-сигнала до тех пор, пока не будет обнаружен шумоподобный сигнал в канале информации.
Период видео-ПСП информационного сигнала равен Т=d·Tγ
(d - только целая часть результата деления  ).
).
Схема управляемого делителя точной дискретной системы ФАП-13 через схему 16 осуществляет перестройку ГПСП-15 и 20 с шагом τ0/n (n - любое целое число, определяемое заданной точностью удержания значения обнаруженного сигнала).
Сигнал ошибки рассогласования для управляемого делителя дискретной системы ФАП-13 вырабатывается схемой сравнения 11 с выходов В и С корреляционных каналов центральной группы.
При появлении сигнала на выходе схемы сравнения 22 выдается команда в устройство 19 на прекращения поиска информационного сигнала, т.е. период стробимпульсов со схемы 19 будет равен Т.
Одновременное появлением сигнала на выходе схемы 22 устройство принятия решения 18, при условии совпадения подряд К стробирующих импульсов (К - любое целое число) с сигналом с выхода 7'Ц устройства 7', принимает решение об обнаружении шумоподобного сигнала, состоящего из информационного и пилот-сигналов и блокирует выдачу сигналов с выходов 7'Л и 7'П по команде схемы принятия решения 18, тем самым повышается помехозащищенность системы синхронизации во время приема информации. Если число совпадений подряд меньше К и равно Р, и после р-го совпадения не произойдет подряд j совпадений стробирующих импульсов (j - целое число) с сигналом на выходе 7'Ц и схемы сравнения 22, то схема 18 принимает решение на продолжение поиска шумоподобного сигнала, выдавая команду на устройство управления поиском схемам 16 и 19.
Режим поиска описан выше.
Так как проверка наличия шумоподобного пилот- и информационного сигналов осуществляется периодически с длительностью, равной длительности периода информационной ПСП, то при больших базах псевдослучайных последовательностей значительно возрастет время поиска, а потери по помехозащищенности составляют 3 дБ по сравнению с поиском шумоподобного сигнала без пилот-сигнала. Предлагается устройство поиска шумоподобного сигнала, которое не имеет указанного выше недостатка, с незначительным увеличением времени поиска без увеличения вероятности пропуска и ложного обнаружения сигнала и с увеличением помехозащищенности режима поиска и обнаружения до 3 дБ. Эта цель достигается тем, что в схему прототипа введены:
- сумматор по модулю два выходных сигналов генераторов ПСП-пилот и информационного,
- регистр сдвига сигнала с сумматора по модулю два,
- два перемножителя на 0-90° на выходе перемножителя 0-180° корреляционного канала,
- интегратор (полосовой фильтр), на выходе перемножителя 0-90°,
- амплитудный детектор на выходе интегратора,
- интегратор со сбросом на выходе каждого корреляционного канала.
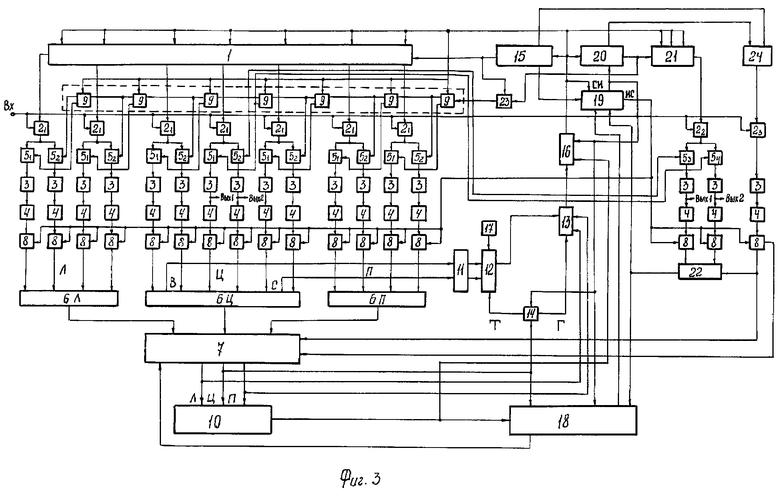
На фиг.3 приведена функциональная схема предлагаемого устройства поиска шумоподобного сигнала.
Устройство содержит задающий генератор тактовых импульсов 17, соединенный со схемой управляемого делителя точной дискретной ФАП-12, выход которого соединен с одним из входов схемы управляемого делителя грубой дискретной ФАП-13, тактовый выход которой соединен со схемой управления по задержке 16, а выход ее соединен с опорными генераторами ПСП-15, 20 и соответственно, с регистрами сдвига ПСП-1, 9 и 21; выходы регистра сдвига соединены со входами перемножителей 2 корреляционных каналов обнаружения пилот-сигналов, а вторые входы всех перемножителей корреляционных канатов соединены вместе и являются общим входом устройства поиска шумоподобного сигнала.
Пилот- и информационные корреляционные каналы состоят из перемножителя на 0-180° (21, 22), к выходу которого подсоединены два перемножителя на 0-90° (51, 52 и 53, 54), к выходам каждого подсоединен интегратор 3, амплитудный детектор 4, интегратор со сбросом 8, которые соединены последовательно. Пороговый корреляционный канал состоит из перемножителя на 0-180° (2), к выходу которого подсоединены интегратор (3), амплитудный детектор 4, интегратор со сбросом 8, соединенные последовательно.
Выход сумматора по модулю два 23 через соответствующие выходы регистра сдвига 9 соединен с соответствующими входами перемножителей 0-90° (5) каждого пилот и информационного корреляционных каналов.
Корреляционные каналы обнаружения пилот-сигнала функционально разделены на три группы таким образом, что на входы корреляторов первой (левой) и третьей (правой) групп поступают опорные ПСП, сдвинутые друг относительно друга на τ0 (τ0 - длительность элементарной посылки ПСП), на входы корреляторов второй (центральной) группы поступают опорные ПСП, сдвинутые друг относительно друга на τ0/2, а сдвиг опорных ПСП, поступающих на рядом стоящие корреляторы первой и второй, второй и третьей групп, равен τ0.
Выходы корреляционных каналов каждой группы соединены с соответствующими входами схем выбора: максимальных значении 6Л, 6Ц и 6П, а выходы схем выбора максимальных значений 6Л, 6Ц и 6П соединены с соответствующими входами двухпороговой решающей схемы 7, два другие входа которой соединены с соответствующими выходами интегратора со сбросом 8 порогового корреляционного канала, следующий вход схемы 7 соединен со схемой принятия решения 18.
Выходы схемы 7 - 7Л и 7П соединены со схемой управляемого делителя грубой дискретной системы ФАП-13, а 7Ц - со схемой 14 управления переключением делителей точной и грубой дискретных ФАП соответственно 12 и 13 и схемой принятия решения 18.
Одновременно выходы схемы 7: 7Л, 7Ц и 7П соединены с сумматором 10, который подсоединяется к следующему входу схемы управления по задержке 16 и схемы принятия решения 18.
Выходы генераторов ПСП 15 и 20 соединены со вторыми входами регистра сдвига 1, 21 и сумматорами по модулю два 23 и 24 соответственно. Следующий выход ГПСП-15 соединен через устройство фазирования по задержке 19 с генератором ПСП-20, схемой управления по задержке 16, схемой управления переключением делителей точной и грубой дискретных ФАП-14, схемой принятия решения 18, следующий выход схемы 18 соединен с устройством фазирования по задержке 19, следующий выход которой соединен со всеми интеграторами всех корреляционных каналов.
Выходы информационного корреляционного канала соединены с соответствующими входами схемы сравнения 22, следующий вход которой подсоединен к одному выходу интегратора со сбросом 8 порогового корреляционного канала, выход схемы сравнения подсоединен ко входам схем 18 и 19. Первый вход перемножителя порогового корреляционного канала соединен с сумматором по модулю два 24.
Выходы левого и правого корреляционных каналов центральной группы соединены через схему выбора максимума 6Ц со схемой сравнения 11, выходы которой соединены со схемой управляемого делителя точной дискретной системы ФАП-12.
Выход Т схемы управления 14 соединен с другими выходами схемы управляемого делителя точной дискретной системы ФАП-12, а другой выход Г схемы управления 14 соединен со входами схемы управляемого делителя грубой дискретной системы ФАП-13.
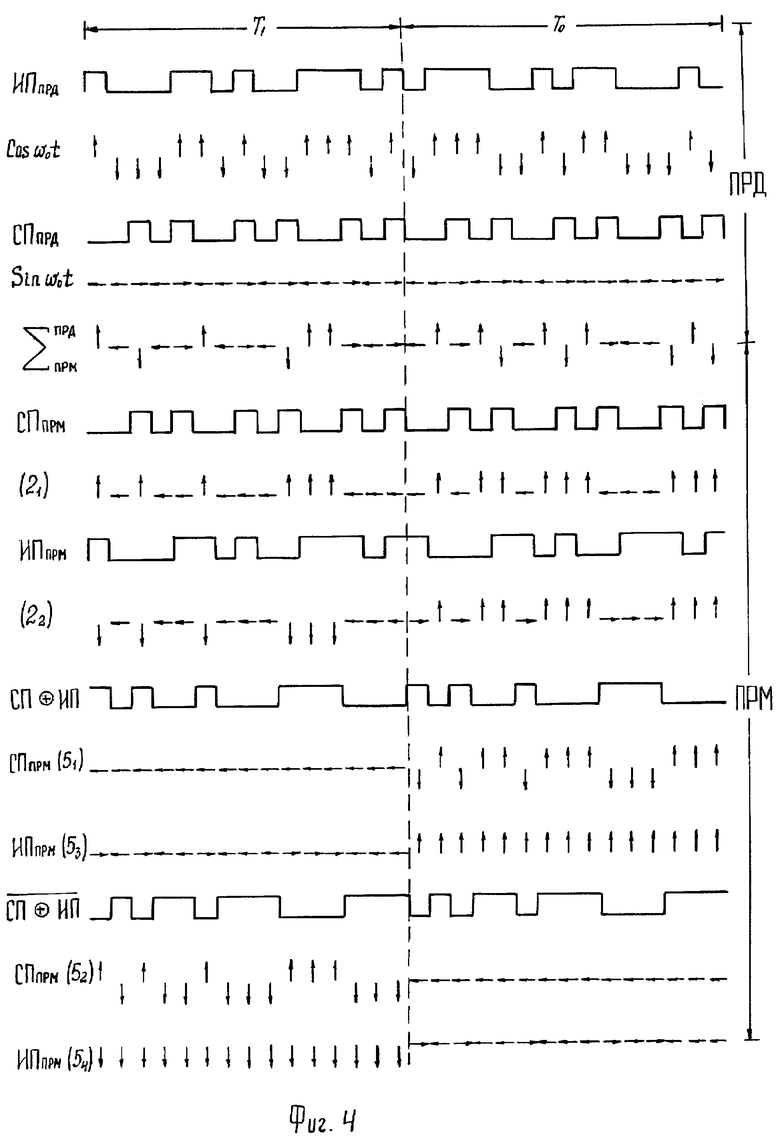
Предлагаемое устройство в начале осуществляет параллельно-последовательный поиск шумоподобного пилот-сигнала, выделяемого с сигнала , сформированного согласно фиг.4 - ПРД, при котором перемножителем (0-180)°-21, а затем перемножителями (0-90°)-51, 52 согласно фиг.4 - ПРМ с последующим наполнением на интеграторах 3 и интеграторах со сбросом 8 производится вычисление взаимокорреляционной функции между входным сигналом и видео-ПСП пилот-сигнала и видео-ПСП, образованной суммой по модулю два сигналов видео-ПСП пилот- и информационного сигнала, как прямого, так и инверсного. Поисковые корреляционные каналы пилот-сигнала распределены на три группы таким образом, что на входы перемножителей 21, 51 и 52 корреляторов первой (левой) и третьей (правой) групп поступают опорные ПСП, сдвинутые друг относительно друга на τ0 (τ0 - длительность элементарной посылки ПСП), на входы перемножителей 21, 51 и 52 корреляторов второй (центральной) группы поступают опорные ПСП, сдвинутые друг относительно друга на τ0/2, а сдвиг опорных ПСП, поступающих на рядом стоящие корреляторы первой и второй, второй и третьей групп, равен τ0.
Устройство работает следующим образом.
Входной шумоподобный сигнал с выхода высокочастотного тракта приемного устройства подается на входы перемножителей 21 корреляционных каналов обнаружения пилот-сигнала.
На вторые входы перемножителей 21 поступают опорные ПСП с регистра сдвига 1. Опорные ПСП, подаваемые на перемножители 51 и 52 корреляционных каналов обнаружения пилот-сигнала, подаются с регистра сдвига 9 соответственно.
На вторые входы перемножителей 22 и 23 поступают опорные ПСП с генератора ПСП информационной последовательности и сумматора по модулю два соответственно. Опорные ПСП, подаваемые на перемножители 53 и 54 корреляционного информационного канала, подаются с регистра сдвига 9 прямая и инверсная.
Результат вычисления корреляционных каналов обнаружения пилот-сигнала поступает с интеграторов со сбросом 8 на схемы выбора максимальных значений 6Л, 6Ц и 6П, где осуществляется выбор максимального сигнала в данном корреляционном канале, а соответственно, в группе. Амплитуда максимального сигнала в данном корреляционном канале на 3 дБ больше, чем на выходе устройства прототипа - смотри фиг.2 ПРМ (31) и фиг.4 ПРМ (51 и 52 для Т1 и T2 соответственно, где Т1 - временной интервал передачи информации - 1, Т0 - временной интервал передачи информации - 0).
Со схем 6Л, 6П и 6Ц максимальные сигналы поступают на двухпороговую решающую схему, в которой осуществляется выбор максимального сигнала с учетом того, что для левой и правой групп пороговое значение сигнала равно Uпор.1, а для центральной группы Uпор.2, причем Uпор.1<Uпор.2.
Значение и соотношение между пороговыми сигналами Uпор.1 и Uпор.2 выбираются из условия минимальной вероятности пропуска и минимальной вероятности ложного обнаружения.
Сначала рассмотрим случай, когда максимальное значение сигналов меньше соответствующих пороговых значений в двухпороговой решающей схеме 7. В этом случае на выходах схемы 7: 7Л, 7Ц и 7П, а следовательно, и на выходе схемы объединения 10, сигнал отсутствует.
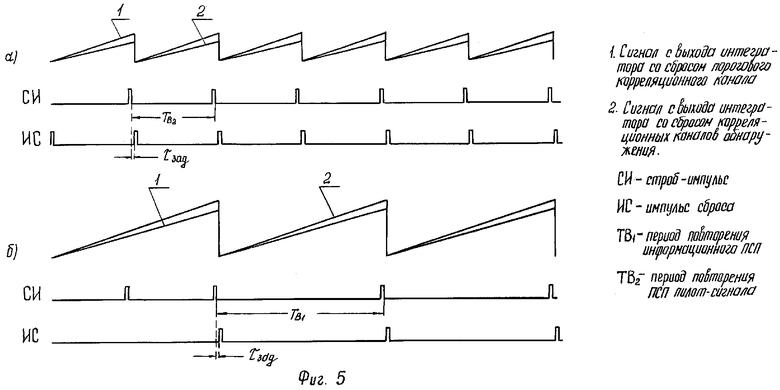
Поэтому схема управления 14 переключением управляемых делителей ФАП-12, ФАП-13 находится в исходном состоянии, при котором с выхода Г схемы 14 подается сигнал подготовки схемы 13 к работе, при условии поступления на вход схемы 14 стробирующего импульса с выхода СИ, вырабатываемого устройством фазирования по задержке 19 с периодом повторения равного длительности периода ПСП пилот-сигнала (см. фиг.5а). На соответствующие входы всех интеграторов со сбросом 8 подаются импульсы сброса с другого выхода устройства фазирования по задержке 19 с периодом повторения стробирующего импульса, но задержан на τзад (τзад - время задержки, выбираемое из условия обеспечения работоспособности устройства). Схема принятия решения 18 находится в исходном состоянии и не выдает запрещающего сигнала на схему фазирования по задержке 19 генератора ПСП-20, при этом со схемы объединения 10 на схему управления по задержке 16, при условии поступления с выхода схемы 19 стробирующего импульса, подается команда на продолжение поиска.
Во время поступления команды продолжения поиска на вход схемы 16, тактовые импульсы с выхода которой "вырезаются" таким количеством, чтобы опорные ПСП пилот-сигнала, поступающие на входы перемножителей 21 сдвинулись на время (m-1)·τ0 относительно ПСП, генерируемых до поступления команды на продолжение поиска в момент действия стробирующего импульса СИ. Таким образом, осуществляется параллельно-последовательный поиск шумоподобного пилот-сигнала на всех временных позициях существования информационного ПСП.
Если максимальное значение сигнала больше соответствующего порогового значения в двухпороговой решающей схеме, и сигнал появится на выходах устройства 7: 7Л или 7П, а следовательно, и на выходе схемы 10. Так как на выходе 7Ц сигнал отсутствует, то схемы 13, 14 и 18 находятся в исходном состоянии, описанном выше.
При появлении сигнала на выходе схемы 10 схема 16 не вырабатывает команды на продолжение поиска, и выдается запрет на выдачу импульса сброса с периодом повторения, равным периоду ПСП пилот-сигнала, и разрешает выдачу стробирующего импульса и импульса сброса [ИС с периодом повторения, равным длительности одного периода информационной ПСП (см. фиг.5б)]. При наличии сигнала на входе схемы 16 со схемы 10 в момент действия стробирующего импульса схема 16 не вырабатывает команды на продолжение поиска для ГПСП-15. В случае отсутствия сигнала на входе 16 со схемы 10 схема 16 вырабатывает команду на продолжение поиска с перестройкой ГПСП-15, описанной выше.
Одновременно схема 18 из-за отсутствия сигнала со схемы 10 выдает запрет на выдачу строб-импульса и импульса сброса со схемы 19 с периодом повторения, равным длительности одного периода информационной ПСП, а разрешает выдачу стробирующего импульса и импульса сброса с периодом повторения, равным длительности одного периода ПСП пилот-сигнала. Поиск сигнала описан выше.
Таким образом, использование строб-импульса и импульса сброса с переменным периодом повторения в процессе поиска позволяет сократить время поиска.
При наличии на выходе 7Л или 7П двухпороговой решающей схемы появится сигнал, то делители грубой дискретной системы ФАП-13 укорачивают или удлиняют период опорных ПСП на τ0 при условии поступления стробирующего импульса на вход схемы 14 (а следовательно, на вход схемы ФАП-13 с выхода Г схемы 14) до тех пор, пока не появится сигнал на выходе схемы 7Ц, а на выходе 7Л или 7П сигнал пропадет.
Синхронно с ГПСП-15 перестраивается и ГПСП-20 во время поиска и обнаружения шумоподобного сигнала.
При появлении сигнала на выходе 7Ц схема управления 14 включает схему управляемого делителя точной дискретной системы ФАП-13 путем переключения сигнала с выхода Г на выход Т схемы 14 в момент появления стробирующего импульса на другом входе схемы 14 с выхода СИ схемы 19. Появление сигнала на выходе 7Ц также включает устройство принятия решения 18, на другой вход которого поступают стробирующие импульсы с выхода СИ схемы 19 с периодом повторения, равным длительности одного периода информационной ПСП. С выхода схемы 18 на вход схемы 19 при появлении сигнала на выходе 7Ц подается команда на обнаружение информационного сигнала. Таким образом, на первом этапе осуществляется параллельно-последовательный поиск структуры ПСП пилот-сигнала, при котором принятие решения о его обнаружении производится за время, равное периоду информационной структуры ПСП.
Обнаружение шумоподобного информационного сигнала, база которого (В1) больше базы (В2) пилот-сигнала, осуществляетсякорреляционным каналом информации с длительностью периода строб-импульса, равной длительности периода видео-ПСП канала информации.
Период видео-ПСП информационного сигнала равен Т=d·Тγ
(d - только целая часть результата деления  ).
).
Схема управляемого делителя точной дискретной системы ФАП-13 через схему 16 осуществляет перестройку ГПСП-15 и 20 с шагом τ0/n (n - любое целое число, определяемое заданной точностью удержания значения обнаруженного сигнала).
Сигнал ошибки рассогласования для управляемого делителя дискретной системы ФАП-13 вырабатывается схемой сравнения 11 с выходов В и С схемы выбора максимального сигнала 6Ц левого и правого корреляционных каналов центральной группы. При появлении сигнала на выходе схемы сравнения выдается команда в устройство 19 на обнаружение информационного сигнала, а длительность периода строб-импульсов со схемы 19 будет равна Т.
Одновременно с появлением сигнала на выходе схемы 22 устройство принятия решения 18, при условии совпадения подряд К стробирующих импульсов (К - любое целое число) с сигналом с выхода 7Ц устройства 7, принимает решение об обнаружении шумоподобного сигнала, состоящего из информационного и пилот-сигналов, и блокирует выдачу сигналов с выходов 7Л и 7П по команде схемы принятия решения 18, тем самым повышается помехозащищенность системы синхронизации во время приема информации. Если число совпадений подряд меньше К и равно Р, и после Р-го совпадения не произойдет подряд j совпадений стробирующих импульсов (j - целое число) с сигналом на выходе 7Ц и схемы сравнения 22, то схема 18 принимает решение на продолжение поиска шумоподобного сигнала, выдавая соответствующую команду на устройство управления поиском схемам 16 и 19, с выхода последней подаются строб-импульсы и импульс сброса с длительностью периода повторения, равной длительности периода ПСП пилот-сигнала.
Режим поиска описан выше.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО СИНХРОНИЗАЦИИ ШУМОПОДОБНОГО СИГНАЛА | 1975 |
|
SU1840645A1 |
| УСТРОЙСТВО ПОИСКА ШИРОКОПОЛОСНЫХ СИГНАЛОВ | 1981 |
|
SU1840149A1 |
| УСТРОЙСТВО ПОИСКА ШУМОПОДОБНОГО СИГНАЛА | 1976 |
|
SU1840434A1 |
| УСТРОЙСТВО ПОИСКА ШИРОКОПОЛОСНОГО СИГНАЛА | 1980 |
|
SU1840288A1 |
| УСТРОЙСТВО ДЛЯ ПОИСКА И СЛЕЖЕНИЯ ЗА ШИРОКОПОЛОСНЫМИ СИГНАЛАМИ | 1981 |
|
SU1840501A1 |
| УСТРОЙСТВО ПОИСКА ШУМОПОДОБНЫХ СИГНАЛОВ | 1983 |
|
SU1840127A1 |
| УСТРОЙСТВО ПОИСКА ШУМОПОДОБНОГО СИГНАЛА | 1980 |
|
SU1840270A1 |
| УСТРОЙСТВО ПОИСКА И СЛЕЖЕНИЯ ЗА ШИРОКОПОЛОСНЫМ СИГНАЛОМ | 1982 |
|
SU1840503A1 |
| УСТРОЙСТВО ПОИСКА ШУМОПОДОБНОГО СИГНАЛА | 1977 |
|
SU1840712A1 |
| УСТРОЙСТВО ДЛЯ ВВОДА В СИНХРОНИЗМ СИСТЕМЫ СВЯЗИ С ШУМОПОДОБНЫМИ СИГНАЛАМИ | 1980 |
|
SU1840128A1 |
Изобретение относится к области радиотехники и может быть использовано в радиотехнических системах связи с шумоподобными сигналами. Технический результат заключается в повышении помехозащищенности. Для этого устройство содержит регистр сдвига, группы корреляционных каналов обнаружения, блоки выбора максимальных значений, решающий блок, блок объединения, блок принятия решения, блок управления по задержке, блок управления точной и грубой системы ФАП, управляемый делитель грубой системы ФАП, управляемый делитель точной системы ФАП, первый и второй блоки сравнения, опорный генератор, входной регистр сдвига, блок фазирования по задержке, генераторы псевдослучайной последовательности (ПСП) пилот-сигнала и информационного сигнала, первый и второй сумматоры, пороговый корреляционный канал, корреляционный канал информационного сигнала, также введен дополнительный регистр сдвига. 1 з.п. ф-лы, 5 ил.