Предлагаемое изобретение относится к области радиосвязи и может быть использовано преимущественно в радиотехнических системах с шумоподобными сигналами при наличии нестабильности несущей частоты за счет эффекта Допплера и других.
Известны устройства поиска и обнаружения шумоподобного сигнала, описанные в книгах: "Шумоподобные сигналы в системах передачи информации". Под редакцией В.Б.Пестрякова. М.: Сов. радио, 1973; Тузов Г.И. Статистическая теория приема сложных сигналов. М.: Сов. радио, 1977.
Однако описанные в этих книгах устройства обладают основным недостатком: низкой помехозащищенностью поиска шумоподобного сигнала при наличии нестабильности несущей частоты, которая может быть результатом наличия эффекта Допплера, нестабильности опорных генераторов передатчика и приемника, а также ретрансляторов искусственных спутников Земли, в случае использования шумоподобных сигналов для связи через ИСЗ.
Наиболее близким по физической сути к предлагаемому изобретению является "Устройство синхронизации шумоподобного сигнала" авторы Козленко Н.И., Сидоренко Г.Г., МКИ Н 04 В 1/10.
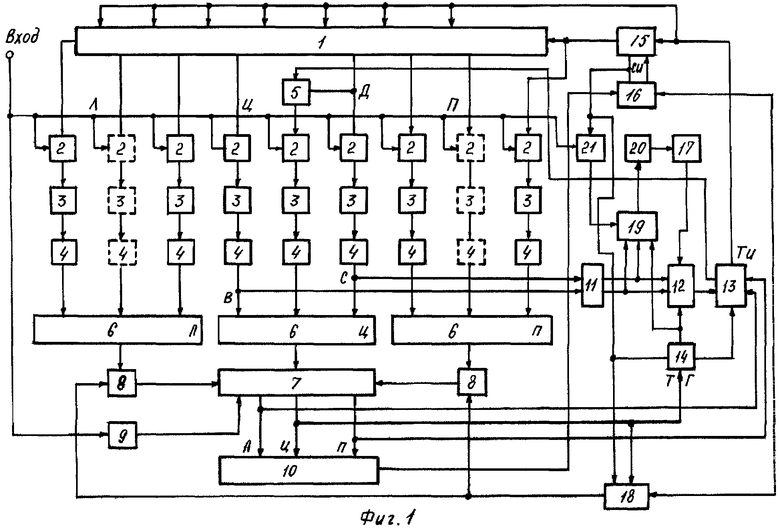
Блок-схема устройства (прототипа) приведена на фиг.1, для которой введены следующие обозначения.
1 - регистр сдвига,
2 - перемножитель,
3 - интегратор,
4 - амплитудный детектор,
5 - сдвигающий триггер,
6Л, 6Ц, 6П - схемы выбора максимальных значений сигналов,
7, 11 - схемы сравнения,
8 - ключи,
9 - формирователь порога,
10 - сумматор,
12 - управляемый делитель точной дискретной системы фазовой автоподстройки (ФАП),
13 - управляемый делитель грубой дискретной системы ФАП,
14 - устройство управления работой точной и грубой системой ФАП,
15 - генератор псевдослучайной последовательности (ГПСП),
16 - схема управления перестройкой ГПСП,
17 - опорный генератор тактовых импульсов,
18 - схема принятия решения,
19 - реверсивный счетчик ФАП,
20 - цифроаналоговый преобразователь (ЦАПФ),
21 - делитель стробимпульсов.
Для облегчения понимания физической сути работы прототипа, а также учитывая, что некоторые функциональные узлы выполняют аналогичные операции, укрупним блок-схему прототипа.
1. Схемы выбора максимальных значений сигналов 6Л, 6Ц, 6П, схема сравнения 7, ключи 8, формирователь порога 9, сумматор 10, схема принятия решения 18 выполняют функцию принятия решения об обнаружении входного шумоподобного сигнала и вырабатывают необходимые сигналы управления. Поэтому указанное соединение функциональных узлов объединим в блок принятия решения и управления.
2. Схема сравнения 11, управляемый делитель точной дискретной системы фазовой автоподстройки (ФАП) 12, управляемый делитель грубой дискретной системы ФАП 13, устройство управления работой точной и грубой систем ФАП 14, опорный генератор тактовых импульсов 17, реверсивный счетчик ФАП 19, цифроаналоговый преобразователь 20, делитель стробимпульсов 21 выполняют следующие функции: поиск входного шумоподобного сигнала на i-ом тактовом интервале длительностью 2(П+П)τ0, где - п - число корреляционных каналов в левой или правой группе, τ0 - длительность элементарного импульса кодовой структуры ПСП, грубую подстройку по фазе опорной ПСП с шагом τ0, точную подстройку по фазе опорной ПСП с шагом τ0/К, где К - целое число. Поэтому вышеуказанное соединение узлов объединим в блок синхронизации.
3. Генератор псевдослучайной последовательности 15, схема управления перестройкой ГПСП 16 выполняют функцию генерирования опорной ГПСП, изменяющейся по задержке. Поэтому функциональные узлы 15, 16 заменим на управляемый генератор ГПСП.
4. Регистр сдвига 1, сдвигающий триггер 5 объединим в блок регистров сдвига.
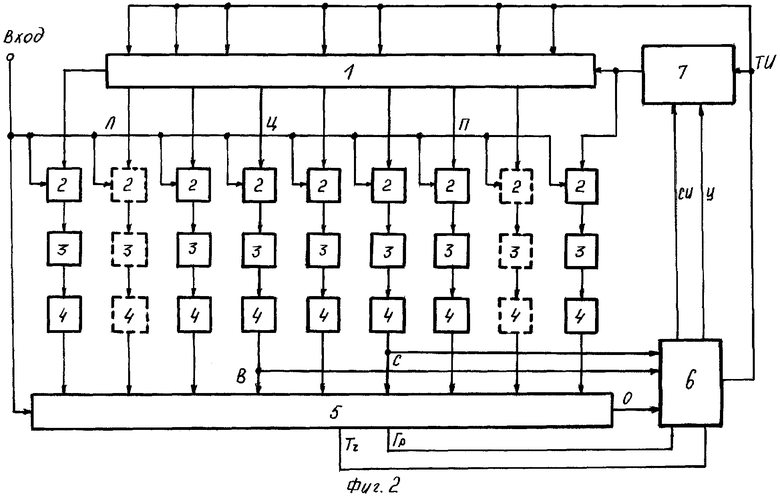
На фиг.2 приведена укрупненная блок-схема прототипа, для которой введены следующие обозначения:
1 - блок регистров сдвига,
2 - перемножитель,
3 - интегратор,
4 - амплитудный детектор,
5 - блок принятия решения и управления,
6 - блок синхронизации,
7 - управляемый генератор ПСП.
Прототип имеет следующие функциональные связи. Вход устройства соединен со входами перемножителей 2, другие входы которых соединены с блоком регистров сдвига 1, входы которого соединены с блоком синхронизации 6 и управляемым генератором 7, выход которого соединен с одним из входов блока регистров сдвига 1, далее выходы перемножителей 2 соединены с интеграторами 3, выходы которых через амплитудные детекторы 4 соединены с блоком принятия решения и управления 5, один из входов которого соединен со входом устройства, а выходы соединены с блоком синхронизации 6, входы которого соединены с выходами левого и правого корреляционных каналов центральной группы, а выходы соединены с блоком управляемого генератора ПСП.
Устройство (прототип) работает следующим образом. Входной шумоподобный сигнал подается на входы перемножителей 2, на другие входы которых подаются опорные псевдослучайные последовательности с блока регистров сдвига 1, сдвинутые друг относительно друга на τ0 для корреляторов левой и правой группы, и на τ0/2 для корреляторов центральной группы.
Результат перемножения с выхода каждого перемножителя 2 поступает на соответствующие интеграторы 3, в качестве которых используются обычные полосовые фильтры, полоса пропускания которых выбирается из требования обеспечения помехозащищенности.
Сигнал с выхода интегратора 3 поступает на амплитудный детектор 4, который осуществляет амплитудное детектирование, т.е. выделение огибающей.
Таким образом, на входах амплитудных детекторов 4 получаются отсчеты взаимокорреляционной функции между входным шумоподобным сигналом и опорной ПСП. С выходов детекторов сигнал подается на блок принятия решения и управления 5. Этот блок выполняет следующие функции:
- выбирает максимальные значения сигналов из всех корреляционных каналов, а также сравнивает выбранный максимальный сигнал с порогом, который формируется в этом блоке за счет приходящего сигнала;
- принимает решение об обнаружении входного шумоподобного сигнала;
- вырабатывает команды и сигналы управления для осуществления подстройки опорных псевдослучайных последовательностей по фазе.
В отсутствие превышения порога хотя бы одним сигналом с амплитудного детектора 4, на выходе блока принятия решения и управления 5 сигнал управления 0 отсутствует.
В этом случае блок синхронизации 6 по команде СИ перестраивает управляемый генератор 7 таким образом, что фаза опорной ПСП смещается на величину 2(n+1)τ0 и поиск входного шумоподобного сигнала осуществляется в (i+1) интервале времени длительностью 2(n+1)τ0
Число временных интервалов поиска N равно

где Тпсп - период псевдослучайной последовательности. Время поиска при этом составляет
Тпоиска=NTнак,
где Тнак - время накопления.
При превышении порога сигналом с любого детектора 4 блок принятия решения и управления 5 вырабатывает сигнал управления 0, которым запрещается перестройка управляемого генератора ПСП7 на 2(n+I)τ0 и одновременно с этим вырабатывается сигнал управления грубой подстройки Гр, по которому блок синхронизации 6 сменяет фазу управляемого генератора ПСП7 на τ0.
Таким образом, осуществляется грубая подстройка фазы с длительностью τ0, до тех пор, пока сигнал не окажется в центральной группе.
При появлении сигнала в центральной группе блок принятия решения и управления 5 принимает решение об обнаружении входного шумоподобного сигнала и вырабатывает сигнал управления точной подстройки Тч, согласно которой блок синхронизации 6 прекращает грубую подстройку и включает точную подстройку по фазе на τ0/К, где К - целое число, по управляющим сигналам В и С, которые поступают с левого и правого корреляторов центральной группы на блок синхронизации 6.
Однако описанное выше устройство (прототип) имеет следующий недостаток - низкую помехозащищенность, при наличии нестабильности частоты входного шумоподобного сигнала. Действительно, при наличии нестабильности несущей частоты входного шумоподобного сигнала полоса интегратора 3, в качестве которого применяется полосовой фильтр, должна выбираться с учетом нестабильности несущей частоты входного шумоподобного сигнала. Это приводит к снижению помехозащищенности устройства.
Этот недостаток можно устранить, например, путем осуществления поиска по частоте входного шумоподобного сигнала.
Однако указанный метод приводит к значительному увеличению времени поиска входного шумоподобного сигнала.
Нами предлагается устройство, свободное от вышеуказанного недостатка, и которое позволяет повысить помехозащищенность поиска при наличии нестабильности несущей частоты входного шумоподобного сигнала.
Блок-схема предлагаемого устройства поиска приведена на фиг.3, для которой введены следующие обозначения.
1 - блок регистров сдвига,
2 - перемножитель,
3 - интегратор,
4 - амплитудный детектор,
5 - блок принятия решения и управления,
6 - блок синхронизации,
7 - управляемый генератор псевдослучайной последовательности,
8 - управляемый усилитель,
9 - сумматор,
10 - линия задержки,
11 - блок смещения частоты,
12 - коммутатор,
13 - генератор сигнала смещения частоты,
14 - схема сравнения
15 - генератор эталонного напряжения,
16 - блок частотно-временного преобразования сигнала.
Предлагаемое устройство имеет следующие функциональные связи. Вход устройства соединен с радиочастотными входами перемножителей 2, видеочастотные входы которых соединены с выходами блока регистров сдвига 1, входы которого подключены к одному из выходов блока синхронизации 6 и к первому входу управляемого генератора псевдослучайной последовательности 7, выход которого соединен с другим входом блоков регистра сдвига 1. Выходы перемножителей 2 в каждом корреляционном канале через интеграторы 3 подключены к блоку частотно-временного преобразования сигнала 16, состоящего из последовательно соединенных управляемого усилителя 8, сумматора 9, линии задержки 10, блока смещения частоты 11, коммутатора 12, выход которого соединен со вторым входом сумматора 9. Второй выход сумматора 9 блока частотно-временного преобразования сигнала 16 подключен через амплитудный детектор 4 к блоку принятия решения и управления 5, выходы которого соединены с блоком синхронизации 6, второй и третий выходы которого подключены к другим входам управляемого генератора псевдослучайной последовательности 7, а четвертый выход соединен с одним из входов схемы сравнения 14. Выходы левого и правого корреляционных каналов центральной группы соединены с вторым и третьим входами блока синхронизации 6, пятый выход которого подключен ко вторым входом коммутатора 12 блоков частотно-временного преобразования сигналов 16, вторые входы управляемых усилителей 8 которых подключены к соответствующим выходам схемы сравнения 14, вход которой соединен с генератором эталонного напряжения 15, а остальные входы соединены с выходами соответствующих блоков частотно-временного преобразования сигналов 16, другие входы блока смещения которых соединены с генератором сигнала частоты смещения 13.
Предлагаемое устройство работает следующим образом. Входной шумоподобный сигнал подается на входы перемножителей 2, на другие входы которых подаются опорные псевдослучайные последовательности с блоков регистров сдвига - 1, сдвинутые друг относительно друга на длительность элементарного символа τ0 кодовой структуры ПСП. Результат перемножения с выхода каждого перемножителя поступает на соответствующие интеграторы - 3.
В отличие от прототипа ширина полосы пропускания интегратора выбирается равной не менее полосы нестабильности несущей частоты входного шумоподобного сигнала, то есть интегратор выполнен широкополосным. Однако, благодаря тому, что между интегратором 3 и амплитудным детектором 4 включен блок частотно-временного преобразования сигнала 16, то снижение помехоустойчивости не происходит. Это эквивалентно повышению помехозащищенности по сравнению с прототипом, у которого полоса пропускания интегратора 3 при наличии нестабильности несущей частоты входного шумоподобного сигнала расширяется на величину полосы этой нестабильности для осуществления поиска.
Поскольку, в предлагаемом устройстве проблему повышения помехозащищенности поиска шумоподобного сигнала при наличии нестабильности несущей частоты в основном решает блок частотно-временного преобразования сигнала 16, рассмотрим его работу более подробно.
В результате перемножения входного шумоподобного сигнала с опорной ПСП при совпадении фаз псевдослучайных последовательностей, образуется синусоидальный сигнал, частота которого отличается от несущей частоты на величину нестабильности. Поэтому, после перемножителя включен широкополосный интегратор 3. С выхода интегратора сигнал, поступающий на управляемый усилитель 8 и затем на линию задержки 10 через сумматор 9, имеет следующий вид:
l(t)=cos Ωt,
где Ω - угловая частота, равная сумме несущей частоты ω0 и величине нестабильности Δω0(ω0≫Δω0)
После прохождения через линию задержки 10 сигнал будет иметь вид:
l10(t)=cos Ω(t-T)=cos( Ωt- ΩT),
а после прохождения его через блок смещения частоты 11 сигнал получит сдвиг по частоте на ΔF
l11(t)=cos[( Ω+ΔF)t- ΩT]
Этот сигнал складывается с входным сигналом, и на выходе сумматора 9 имеем в течение времени T<t<2T
lg(t)=cos Ωt+cos[( Ω+ΔF)t- ΩT]
Сигнал lg(t) также проходит через сумматор, линию задержки, блок смещения частоты и в результате на выходе образуется сумма трех членов.
lg(t)1=cos Ωt+cos[( Ω+ΔF)t- ΩT]+cos[( Ω+2ΔF)t-ΔFT-2 ΩT,
при 2Т<t<3Т
Общее выражение для выходного сигнала после N циркуляций равно:

при NT<t<(N+1)T
При условии  после преобразований получим
после преобразований получим
при 0<t'<T
При ω0≫Δω0, ω0≫ΔF можно выделить огибающую функции lg(t)N
где U=ΔFt'-Δω0T
При U≪1 
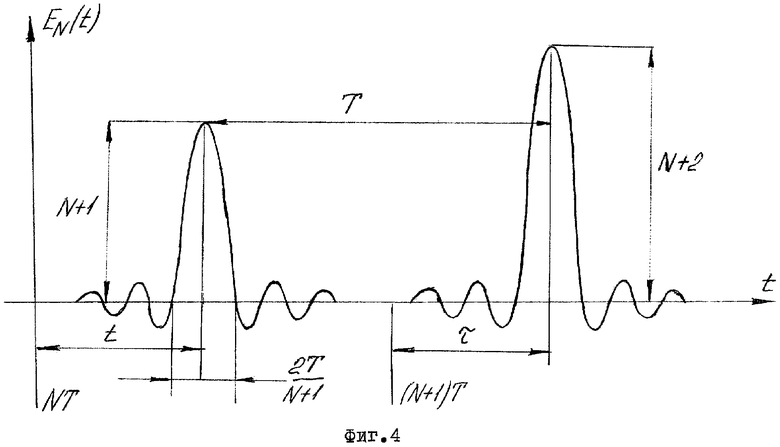
На фиг.4 построена зависимость EN(U).
Из условия ΔFτ-Δω0T=0 можно определить момент t'=τ, при котором огибающая выходного сигнала имеет максимум

Следовательно, существует прямая линейная зависимость между частотой смещения Δω0 и временем появления максимума огибающей.
Нетрудно показать, что действие схемы остается тем же, когда несущая частота ω0 отличается от ΔF не в целое число раз. То есть система действует как набор N фильтров с полосой пропускания 1/N, каждый из которых имеет полосу частот равну  . Спектр сигнала на выходе устройства расширяется в N раз за счет увеличения частоты каждой спектральной составляющей входного сигнала после одной циркуляции на 1/T. Таким образом осуществляется выделение несущей частоты при наличии нестабильности.
. Спектр сигнала на выходе устройства расширяется в N раз за счет увеличения частоты каждой спектральной составляющей входного сигнала после одной циркуляции на 1/T. Таким образом осуществляется выделение несущей частоты при наличии нестабильности.
Поскольку преобразование сигнала, производимое схемой линейны, то присутствие белого шума прошедшего до устройства, например, через идеальный полосовой фильтр с полосой от ω0- до +
до + не изменит хода преобразования сигналов и в момент оценки.
не изменит хода преобразования сигналов и в момент оценки.
NT<tN<(N+1)T.
его мощность составит
R2(tN)=(N+1)
Исходное соотношение сигнал/шум
 преобразуется схемой в
преобразуется схемой в
 при t=τ
при t=τ
Таким образом, из последнего выражения следует, что соотношение сигнал/шум улучшается с увеличением числа рециркуляции N.
С выхода блока частотно-временного преобразования сигнала 16 сигнал поступает на амплитудные детекторы 4, в которых выделяется огибающая и далее поступает на блок принятия решения и управления 5 для сравнения с порогом.
В отсутствии превышения порога, хотя бы одним из сигналов, сигнал управления 0 на выходе блока принятия решения и управления 5 отсутствует, что является разрешением для блока синхронизации 6 к перестройке фазы управляемого генератора псевдослучайной последовательности 7 по nτ0. Таким образом осуществляется поиск широкополосного сигнала в iой зоне, длительностью nτ0.
Цикл поиска входного шумоподобного сигнала повторяется для следующего i+1 интервала и т.д., до тех пор, пока не пройдет просмотр всего периода всех фаз шумоподобного сигнала.
В момент превышения порога сигналом с любого амплитудного детектора 4 блок принятия решения и управления 5 вырабатывает сигнал 0, которым запрещается перестройка управляемого генератора ПСП по nτ0, одновременно формируется сигнал грубой подстройки Гр, по которому блок синхронизации 6 меняет фазу управляемого генератора ПСП7, осуществляя грубую подстройку фазы по τ0 до тех пор, пока сигнал не окажется в центральном канале. При появлении сигнала в центральном канале блок принятия решения и управления 5 вырабатывает команду точной подстройки Тч, согласно которой блок синхронизации 6 прекращает грубую подстройку и включает точную подстройку по фазе τ0/K, где K - целое число, по управляющим сигналам В и С, которые поступают с левого и правого каналов центральной группы.
Отличительной особенностью от прототипа является то, что в конце каждого интервала времени накопления с блока синхронизации 6 формируются и подаются на блок принятия решения и управления 5 импульс считывания ИС, в котором происходит сравнение выборки сигнала с порогом, а на коммутатор 12 импульс гашения ИГ, передний фронт которого совпадает с задним фронтом импульса считывания. Длительности импульсов считывания и гашения соответствуют длительности времени задержки линии 10. В момент прихода импульса-гашения на коммутатор 12 кольцо обратной связи в блоке частотно-временного преобразования сигналов 16 разрывается и происходит подготовка частотно-временного преобразователя к новому интервалу накопления Тнак.
На блок смещения частоты 11 подается сигнал генератора частоты смещения 13, частота которого выбирается, исходя из параметров кольца обратной связи блока частотно-временного преобразования сигналов 16.

где Тл.з. - время задержки линии 10.
Кроме того, в данном устройстве введена система АРУ, позволяющая увеличить динамический диапазон блока частотно-временного преобразования сигналов 16. На схему сравнения 14 поступает сигнал постоянного уровня с генератора эталонного напряжения 15, на другие входы сигналы со всех линеек частотно-временного преобразования сигналов 16. Происходит выравнивание коэффициентов передачи во всех корреляционных линейках. В момент обнаружения сигнала с блока синхронизации 6 поступает сигнал, которым разрывается кольцо АРУ и прекращает поступать управляющее напряжение АРУ на управляемые усилители 8 во всех линейках одновременно. Таким образом, в момент приема входного шумоподобного сигнала коэффициенты передачи во всех линейках остаются приблизительно одинаковыми.
Оценим эффективность предлагаемого устройства. Для этого предположим, что полоса входного шумоподобного сигнала равна ΔfВХ=1000 Кгц, а полоса интегратора 3 выбранная из требования помехозащищенности ΔFп.=1 Кгц, тогда реализуемая база сигнала составляет 1000.
Пусть имеется нестабильность несущей частоты входного шумоподобного сигнала, вызванная, например, эффектом Допплера, равная Δfнест=100 кГц.
При этом реализуемая база сигнала составит 10. Таким образом, для прототипа, в случае наличия нестабильности несущей частоты входного шумоподобного сигнала, вызванного, например эффектом Допплера, происходит снижение помехозащищенности в 100 раз.
В нашем случае подобного снижения помехозащищенности не происходит.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ПОИСКА ШУМОПОДОБНОГО СИГНАЛА | 1985 |
|
SU1840282A1 |
| УСТРОЙСТВО СИНХРОНИЗАЦИИ ШУМОПОДОБНОГО СИГНАЛА | 1975 |
|
SU1840645A1 |
| УСТРОЙСТВО ПОИСКА ШУМОПОДОБНОГО СИГНАЛА | 1985 |
|
SU1840083A1 |
| УСТРОЙСТВО ПОИСКА И ОБНАРУЖЕНИЯ ШУМОПОДОБНОГО СИГНАЛА | 1979 |
|
SU1840447A1 |
| УСТРОЙСТВО ПОИСКА ШУМОПОДОБНОГО СИГНАЛА | 1979 |
|
SU1840118A1 |
| УСТРОЙСТВО ПОИСКА ШИРОКОПОЛОСНОГО СИГНАЛА | 1980 |
|
SU1840288A1 |
| УСТРОЙСТВО ДЛЯ ВВОДА В СИНХРОНИЗМ СИСТЕМЫ СВЯЗИ С ШУМОПОДОБНЫМИ СИГНАЛАМИ | 1980 |
|
SU1840128A1 |
| УСТРОЙСТВО ДЛЯ ПОИСКА И СЛЕЖЕНИЯ ЗА ШИРОКОПОЛОСНЫМИ СИГНАЛАМИ | 1981 |
|
SU1840501A1 |
| УСТРОЙСТВО СИНХРОНИЗАЦИИ ПРИЕМНИКА ШУМОПОДОБНЫХ СИГНАЛОВ | 1980 |
|
SU1840647A1 |
| ПРИЕМОПЕРЕДАЮЩАЯ АППАРАТУРА ШИРОКОПОЛОСНЫХ ПСЕВДОСЛУЧАЙНЫХ СИГНАЛОВ | 1979 |
|
SU1840119A1 |
Изобретение относится к области радиосвязи и может быть использовано в радиотехнических системах с шумоподобными сигналами при наличии нестабильности несущей частоты за счет эффекта Допплера. Техническим результатом изобретения является повышение помехозащищенности поиска при наличии нестабильности несущей частоты входного шумоподобного сигнала. Для чего в известное устройство дополнительно введены генератор сигнала смещения частоты, блок сравнения, генератор эталонного напряжения, блоки частотно-временного преобразования сигналов, состоящие из последовательно соединенных управляемого усилителя, сумматора, линии задержки, блока смещения частоты и коммутатора, выход которого соединен с другим входом сумматора, причем входы блоков частотно-временного преобразования подключены к выходам интеграторов, а выходы - к входам амплитудных детекторов, дополнительные выходы блока синхронизации подключены соответственно к входам коммутаторов и блоку сравнения, выходы которого соединены с входами управляемых усилителей, а другие входы блока сравнения соединены соответственно с выходом генератора эталонного напряжения и с выходами сумматоров, генератор сигнала смещения частоты соединен со входами блоков смещения частоты. 4 ил.
Устройство поиска шумоподобного сигнала, содержащее последовательно соединенные блок реестров сдвига, перемножители, интеграторы, амплитудные детекторы, блок принятия решения и управления, блок синхронизации, управляемый генератор псевдослучайной последовательности (ПСП), отличающееся тем, что, с целью повышения помехозащищенности поиска при наличии нестабильности несущей частоты входного шумоподобного сигнала, введены генератор сигнала смещения частоты, блок сравнения, генератор эталонного напряжения, блоки частотно-последовательного преобразования сигналов, состоящие из последовательно соединенных управляемого усилителя, сумматора, линии задержки, блока смещения частоты и коммутатора, выход которого соединен с другим входом сумматора, причем входы блоков частотно-временного преобразования подключены к выходам интеграторов, а выходы - к входами амплитудных детекторов, дополнительные выходы блока синхронизации подключены соответственно к входам коммутаторов и блоку сравнения, выходы которого соединены с входами управляемых усилителей, а другие входы блока сравнения соединены соответственно с входом генератора эталонного напряжения и с выходами сумматоров, генератор сигнала смещения частоты соединен со входами блоков смещения частоты.

