Предлагаемое изобретение относится к области измерения статистических характеристик гидрофизических полей жидкости, в частности к датчикам измерения мгновенных значений гидрологических характеристик и может быть использовано в системах гидролокации для обнаружения движущихся в погруженном положении в режиме полного молчания объектов, например, типа подводных диверсионных средств и сил /ПДСС/, в состав которых входят боевые пловцы /БД/, средства их доставки, малые /МПЛ/ и сверхмалые /СМПЛ/ подводные лодки и другие морские малые боевые средства, движущиеся в погруженном положении.
Известны устройства измерения различных характеристик жидкости:
1) основанные на определении водорода, образующегося в морской воде при работе атомных реакторов подводных лодок;
2) датчики поля радиоактивности;
3) датчики температуры;
4) датчики пульсаций давления;
5) основанные на измерении малых изменений импульса переноса - гидрофизический преобразователь.
Все эти устройства объединяет то, что они измеряют либо регулярные, либо нерегулярные составляющие гидродинамических характеристик жидкости.
В то же время всем этим устройствам присущи и общие недостатки.
Основным недостатком первых двух типов датчиков является то, что они применимы в системах обнаружения только атомных подводных лодок.
Основным недостатком датчиков третьего типа является то, что они не эффективны при волнении моря из-за резких уменьшений и искажений регистрируемых локальных аномалий в силу их диссипации, вызванной морским волнением.
Датчики IV типа применимы на подводных лодках для измерения фоновой турбулентности морской воды, а также в системах обнаружения и измерения параметров турбулентности в кильватерном следе подводной лодки и не могут быть использованы в интересах обнаружения ПДСС.
Устройство V типа относится к измерительным приборам, применяемым только в стационарных системах гидролокации, не подверженных воздействию механических вибраций и предназначенных для обнаружения подводных целей типа ПДСС в прибрежной зоне континентального шельфа.
Известно также гидрофизическое устройство /ГФУ/.
Это устройство по своему функциональному назначению наиболее близко к предполагаемому изобретению и выбрано в качестве прототипа. Устройство имеет герметичный корпус с крышкой, в котором размещены взаимосвязанные электронный блок, блоки адаптации, измерительный преобразователь и компенсационный преобразователь с жидкостной компенсационной камерой, каждый из преобразователей включает измерительный блок с резонатором и чувствительным элементом, чувствительный элемент измерительного блока каждого преобразователя расположен в полости корпуса устройства и соединен с выполненным в виде мембраны днищем резонатора, который размещен на внутренней поверхности упомянутой полости корпуса и заполнен инертной жидкостью /более плотная фаза/, например, составом, изготовленным на основе полиметилсилоксановой жидкости типа ПМС ГОСТ 13032-77 или на основе кремнийорганической жидкости типа ПЭС-В ГОСТ 16480-70, не перемешиваемой с окружающей средой /менее плотная фаза/, при этом полость резонатора измерительного преобразователя соединена с внешней жидкой средой /менее плотная фаза/, а компенсационного - с жидкой средой /идентичной внешней жидкой среде/, заключенной в жидкостной компенсационной камере, через капилляры, выполненные в плоскости нормальной плоскостям мембран.
Устройство работает следующим образом.
На поверхности раздела двух фаз /две несмешиваемые жидкости/ в результате различного межмолекулярного взаимодействия в соприкасающихся фазах обнаруживается направленная внутрь более плотной фазы равнодействующая сил, приложенных к площади слоя раздела. А на поверхности раздела между этими жидкостями и твердым телом свойства поверхности натяжения вызывают особые явления, которые проявляются в образовании капиллярных волн при возмущениях внешней среды. В этом случае существование устойчивости и равновесия зависит от величины натяжений на поверхностях раздела и от степени смачивания. При этом внутри жидкости более плотной фазы, заключенной в капиллярах, формируются жидкостные линзы.
Воздействие структурных шумов, обусловленных вибрациями корпуса корабля, которые вызываются работой силовых установок, обеспечивающих жизнедеятельность корабля во время стоянок, например, в акваториях внутренних и внешних рейдов и передаваемых через шток поворотно-выдвижного устройства /ПВУ/ непосредственно на ГФУ, приводит к значительному ухудшению отношения сигнал/шум, снижению точности измерений малых изменений импульса переноса в жидкой, окружающей ГФУ, среде и приводит к изменению импульса переноса в жидкостной компенсационной камере. Это приводит к созданию градиента импульса переноса над квазинеподвижной поверхностью раздела в последней. Вследствие этого движение у поверхности раздела станет неустойчивым и распадется на отдельные вихри, которые создают пульсационный ход давления над поверхностью раздела, что приводит к образованию в более плотной фазе жидкости первичных капиллярных волн и изменению энергонасыщенности коротких волн в жидкостных линзах, сформированных внутри жидкости более плотной фазы, заключенной в капиллярах. Наведенные в резонаторе под воздействием структурных шумов волны, воздействуя на чувствительный элемент, вызывают его колебания, что приводит к изменению выходного сигнала измерительного блока, который подается на соответствующий дифференциальный каскад электронного блока.
Вследствие идентичности конструкции измерительного и компенсационного преобразователей выходные сигналы, обусловленные структурными шумами, будут равны. Для выделения из смеси сигнал + шум составляющей, обусловленной структурными шумами, сигналы с выходов дифференциальных каскадов измерительного и компенсационного преобразователей подают на вход выходного дифференциального каскада, в котором производится компенсация вибрационных помех, обусловленных структурными шумами.
Данное устройство относится к измерительным приборам, применяемым в составе бортовых корабельных средств гидролокации для обнаружения подводных целей типа ПДСС в условиях воздействия структурных шумов, обусловленных вибрациями корпуса корабля. Однако, повышенное выходное сопротивление />1,5 кОм/ измерительных блоков обоих преобразователей приводит к росту тепловых шумов и к сужению динамического диапазона в области малых /пороговых/ сигналов. Кроме того, трудности изготовления полностью идентичных упомянутых измерительных блоков снижают возможность полной компенсации помех, обусловленных структурными шумами, а упругие свойства механических элементов измерительных блоков /например, чувствительных элементов, мембран и т.п./, выполненных из поликристаллических материалов, порождают явления гистерезиса /в частности, отставание выходного сигнала от входного воздействия/ и упругого последействия. Это приводит к значительному ухудшению отношения сигнал/шум, существенному снижению класса точности измерения бортовыми корабельными средствами малых изменений импульса переноса, обусловленных движущимся в погруженном положении объектом типа ПДСС, особенно в области пороговых сигналов в условиях воздействия структурных шумов.
Целью предлагаемого изобретения является повышение точности измерения малых изменений импульса переноса в условиях воздействия структурных шумов.
Поставленная цель достигается за счет того, что в гидрофизическом устройстве, имеющем герметичный корпус с крышкой и содержащем взаимосвязанные электронный блок, блоки адаптации, измерительный преобразователь и компенсационный преобразователь с жидкостной компенсационной камерой, а каждый из преобразователей включает измерительный блок с резонатором и чувствительным элементом, чувствительный элемент измерительного блока расположен внутри полости корпуса и соединен с выполненным в виде мембраны днищем резонатора, размещенным на внутренней поверхности корпуса и заполненным инертной жидкостью /более плотная фаза/, при этом полость измерительного преобразователя соединена с внешней жидкой средой /менее плотная фаза/, а компенсационного - с жидкой средой, заключенной в жидкостной компенсационной камере, через капилляры, выполненные в полости, нормальной плоскостям мембран, измерительные блоки измерительного и компенсационного преобразователей размещены диаметрально противоположно в одной полости, в едином корпусе с которой выполнена упомянутая жидкостная компенсационная камера, заполненная жидкостью идентичного с окружающей средой фазового состояния так, чтобы в ее полости оставался некоторый объем воздуха, при этом полости измерительных блоков и жидкостной компенсационной камеры разделены на две части, каждая, сетчатыми защитно-ограничительными перегородками, а в верхних частях упомянутых полостей на их торцах герметично установлены упомянутые блоки адаптации. Электронный блок расположен в изолированной герметичной полости, выполненной в нижней части корпуса.
Такое построение устройства обеспечивает повышение точности измерения малых изменений импульса переноса бортовыми корабельными системами в условиях воздействия структурных шумов, обусловленных вибрациями корпуса корабля, во всем диапазоне рабочих глубин благодаря тому, что измерительные блоки измерительного и компенсационного преобразователей размещены в одной полости и в единой конструкции, что обеспечивает надежную идентификацию условий работы обоих измерительных блоков, в том числе и в период адаптации, и в конечном итоге приводит к повышению точности измерений.
Объединение электронных блоков измерительного и компенсационного преобразователей и выходного дифференциального каскада в едином электронном блоке, выполненном на одной плате, устраняет помехи, обусловленные межблочными и межплатными связями по электрическим и сигнальным цепям, также приводит к повышению точности измерений.
Данное техническое решение соответствует критериям ″существенные отличия″ и ″новизна″, так как все перечисленные выше признаки в этой совокупности органически связаны, существенны, необходимы и достаточны для обеспечения поставленной задачи.
Все признаки в заявляемом устройстве известны порознь, но в той совокупности, в которой они заявлены в предложенном техническом решении, не встречаются ни в аналогах, ни в прототипе, ни в других источниках информации, доступных заявителю и авторам. При этом заявляемая совокупность признаков проявляет новое свойство, которое не обнаруживается ни в одном из известных объектов, а именно: измерять малые изменения импульса переноса, обусловленные локальными возмущениями, возбуждаемыми движущимися в погруженном положении объектами типа ПДСС, в условиях воздействия структурных шумов с повышенной точностью измерений при одновременном упрощении конструкции, увеличении долговечности, снижении энергопотребления и массо-габаритных характеристик устройства.
Подобные технические решения с заявляемой совокупностью признаков авторам и заявителю не известны и поэтому предложенное техническое решение соответствует критериям ″существенные отличия″ и ″новизна″.
Сущность изобретения поясняется чертежами, на которых изображены:
на фиг. 1 - общий вид устройства;
на фиг. 2 - корпус устройства с электронным блоком;
на фиг. 3 - корпус конструкции измерительного блока;
на фиг. 4 - резонатор измерительного блока компенсационной части;
на фиг. 5 - блок адаптации;
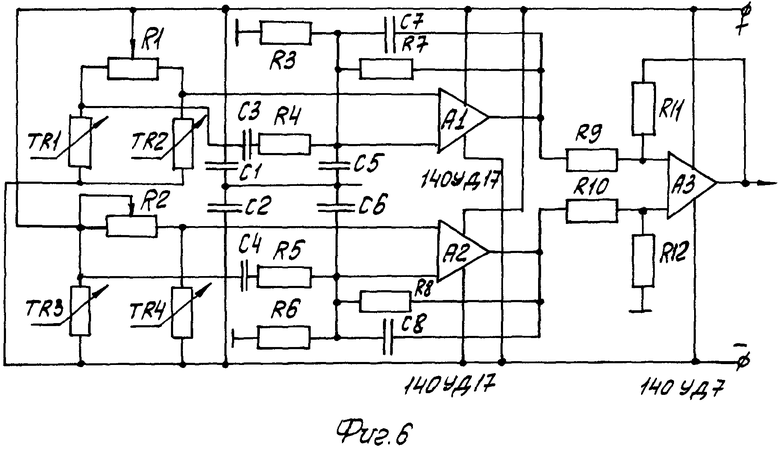
на фиг. 6 - электронный блок, схема электрическая;
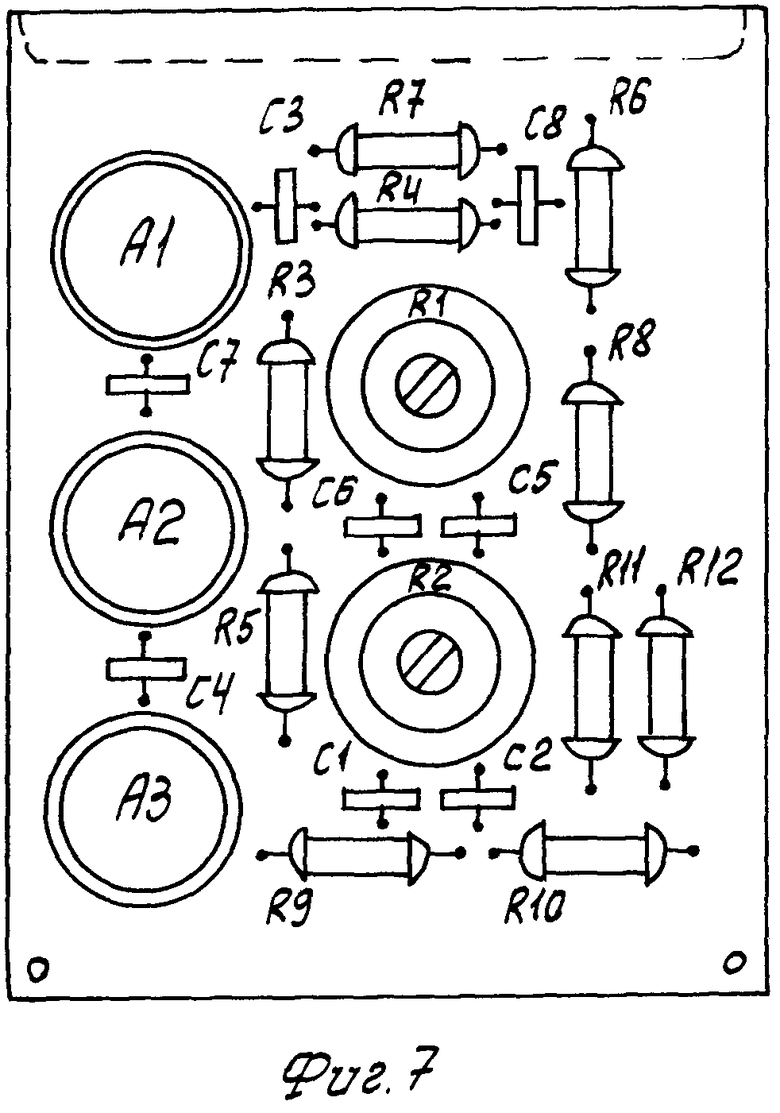
на фиг. 7 - электронный блок, схема монтажная.
Гидрофизическое устройство /см. фиг. 1, 2/ состоит из герметичного корпуса 1 с крышкой 2, в котором выполнены три полости: полость 3 в нижней части и полости 4 и 5 в верхней части, и который содержит взаимосвязанные: в полости 3 - плату 6 электронного блока 7, в полости 4 - измерительный и компенсационный преобразователи с идентичными измерительными блоками 8 и 9, которые расположены диаметрально противоположно друг к другу, а в полости 5 - жидкостную компенсационную камеру. Полость 3 с помощью уплотнительной прокладки 10 герметично закрыта крышкой 2, в центре которой герметично закреплена приборная вилка 11 типа 2РМГД24Б10Ш5Е2. Полости 4 и 5 разделены на две части каждая сетчатыми защитно-ограничительными перегородками, а на их торцах установлены идентичные блоки адаптации 12 и 13 к изменяющимся внешним гидрологическим условиям при изменении рабочей глубины.
Измерительные блоки 8 и 9 состоят из идентичных резонаторов 14 и 15 и чувствительных элементов 16 и 17.
Чувствительные элементы 16 и 17 измерительных блоков 8 и 9 соответственно расположены внутри полости 4 и соединены с выполненными в виде мембран днищами соответствующих резонаторов 14 и 15. Чувствительный элемент 16 выполнен [1] на основе кремниевого полупроводникового монокристаллического сдвоенного тензорезистора с коэффициентом тензочувствительности К=/1÷1,2/×102 в виде тонкой струны диаметром 12-30 мкм с выводом от средней точки с утолщениями по концам и в середине для создания на них омических контактов с малой плотностью тока и состоит из двух симметричных рабочих частей - измерительной и термокомпенсационной. Одним из двух утолщений на концах чувствительный элемент 16 /17/ жестко укреплен в центре днища резонатора 14 /15/, выполненного в виде плоской прецизионной мембраны 18 /19/ радиусом порядка 8 мм перпендикулярно плоскости последней, а утолщением на другом конце /термокомпенсационной части/ на жесткой опоре 20 /21/ без растяжения-сжатия /см. фиг. 3/. Средний вывод /утолщение/ укреплен на контактной площадке 22 /23/.
Резонатор 15 измерительного блока 9 выполнен в едином корпусе /см. фиг. 4/ с блоком капилляров 24. Для предотвращения разрушения чувствительных элементов 16 и 17 во всем диапазоне измеряемых величин переходы между их рабочими частями и утолщениями выполнены по принципу стержня равного сопротивления. Такое выполнение переходов при недопустимых /аварийных/ перегрузках вызывает плавный по определенному радиусу изгиб чувствительного элемента 16 /17/ /точнее его измерительной части/ без разрушения. Упругие силы возвращают чувствительный элемент 16 /17/ после снятия упомянутых перегрузок в исходное положение без остаточных деформаций.
Резонаторы 14 и 15 размещены в полости 4 диаметрально противоположно на внутренней поверхности верхней части 25 корпуса 1. Внутренние полости резонаторов 14 и 15 заполнены инертной жидкостью /более плотная фаза/, например, составом, изготовленным на основе полиметилсилоксановой жидкости типа ПМС ГОСТ 13032-77 или на основе кремнийорганической жидкости типа ПЭС-В ГОСТ 16480-70 не перемешиваемой с окружающей жидкой средой /менее плотной фазой/ и идентичной с ней жидкостью, заключенной в жидкостной компенсационной камере, расположенной в полости 5. При этом полость резонатора 14 соединена с окружающей средой через капилляры 26, выполненные в корпусе 1 в плоскости, нормальной к плоскости мембраны 18, а полость резонатора 15 соединена с жидкостной компенсационной камере через капилляры 24.
Блоки адаптации 12 /13/ состоят /см. фиг. 5/ из сильфона 27, закрытого с одного торца герметично, а с другого - фигурным фланцем 28 со штуцером 29, с помощью которого полость сильфона 27 соединена с внешней средой, цилиндра 30, с одного торца закрытого глухим днищем, а на другом торце с внутренней стороны жестко установлены направляющие 31, внутренний радиус которых равен радиусу наружной окружности гофров сильфона 27, а длина равна не менее двум периодам гофров сильфона 27, достаточная для плавного скольжения цилиндра 30 вдоль упомянутых гофров, на цилиндр 30 свободно одета герметичная с одного торца высокоэластичная манжета 32, а отбортовка манжеты 32 на противоположном торце служит для установки на торцах полостей 4 и 5 блоков адаптации соответственно 12 и 13 и герметизации их при помощи фигурного фланца 28 и гайки 33 с отверстием в ее центре для вывода штуцера 29 сильфона 27.
В качестве сильфона 27 использованы стандартные сильфоны, например, из серии НС ГОСТ 11915-72, рассчитанные на работу в различных диапазонах рабочих глубин /давлений/. При этом фланец 28, штуцер 29, цилиндр 30 и направляющие 31 также как и сильфон 27 изготовлены из нержавеющей стали 36НХТЮ /ЭН-702/, что обеспечило высокое качество сварных соединений деталей блока адаптации 12 /13/. Кроме того, применение упомянутого материала повышает стойкость блока адаптации 12 /13/ к воздействию морской воды и увеличивает его долговечность. Манжета 32 изготовлена методом вулканизации в форме из высокоэластичных резиновых смесей, например, марки Ш-1б-23 /НО-68-1/ ТУ38-10510-82 или ИРП ТУ38-103321-76. Связь между радиусом r поршня 30 с учетом толщины стенки манжеты 32 и свободным ходом l поршня 30 определяется выражением
где V0 - свободный объем внутренней полости;
Pu(hi) - дополнительное давление внешней среды, определяемое диапазоном рабочих глубин;
hi - рабочая глубина;
P0 - давление над свободной поверхностью моря.
Максимальное значение величины lmax определяется максимальным удлинением сильфона 27, - Δlmax. Значение величины lmax может быть увеличено на величину Δl′ сжатием сильфона 27 с помощью манжеты 32 при его установке. Тогда максимальное значение свободного хода поршня 30 определяется как
lmax=Δl+Δl′.
Но в этом случае на эту же величину должна растягиваться и манжета 32 без остаточной деформации /с учетом ее установочного растяжения/.
Электронный блок 7 /см. фиг. 6, 7/ состоит из схем включения чувствительных элементов 16 и 17 /TR1-TR2 и TR3-TR4/, собранных по мостовой схеме, интеграторов, выполненных на операционных усилителях А1 и А2 типа 140УД17 с активными /С7-R7 и С8-R8/ и пассивными /C5-R4 и С6-R5/ цепями интеграции, входы которых соединены с выходами соответствующих схем включения, а выходы - со входами выходного дифференциального каскада, собранного на микросхеме A3 типа 140УД7, в котором производится компенсация вибрационных помех, обусловленных структурными шумами и выход которого является выходом ГФУ.
Форма корпуса 1 выбрана из условия обеспечения устранения возникновения дополнительных помех в виде вихревых образований в месте контакта внешней среды через капилляры 26 с жидкостью, заключенной в полости резонатора 14 измерительного блока 8.
Связь гидрофизического устройства с постом регистрации, индикации и управления осуществляется с помощью герметичной, водонепроницаемой приборной вилки 11, например, типа 2РМТД24Б10Ш5Е2, которая связана с электронным блоком 7 и герметично укреплена на крышке 2.
Сборку ГФУ осуществляют следующим образом /см. фиг. 1, 2, 3, 4/.
В ячейки 34 и 35 корпуса конструкции измерительных блоков 8 и 9 герметично и жестко вставляют резонаторы 14 и 15. В центре днищ последних с помощью, например, эпоксидного клея типа ″Спрут″ и др., укрепляют омические контакты измерительных частей чувствительных элементов 16 и 17, средние точки которых также с помощью клея укрепляют на соответствующих им контактных площадках 22 и 23 так, чтобы измерительные части чувствительных элементов 16 и 17 были перпендикулярны взаимнопараллельным плоскостям, выполненных в виде прецизионных мембран 18 и 19 днищ резонаторов 14 и 15. Свободные омические контакты термокомпенсационных частей чувствительных элементов 16 и 17 без сжатия-растяжения укрепляют на контактных площадках жестких опор 21 и 22. Выводы от всех омических контактов чувствительных элементов 16 и 17 выводят через фланец 36, а место вывода герметизируют с помощью герметика, например, типа УТ-32 ТУ38.1051386-8. С помощью направляющих 37 измерительные блоки 8 и 9 в сборе устанавливают в специальном пазе в полости 4 корпуса 1, закрепляют и заполняют упомянутой жидкостью полости резонаторов 14 и 15 и капилляры 24 и 26. На кронштейне 38, укрепляемом в полости 3, устанавливают вилку 39 /например, типа МРН14-1/ и с помощью однотипной с ней розетки 40 устанавливают плату 6 электронного блока 7, а свободную грань ее фиксируют на кронштейне 41. Полость 3 при помощи уплотнительной прокладки 10 и крышки 2, в которой предварительно жестко и герметично устанавливают приборную вилку 11 типа 2РМГД24Б10Ш5Е2, герметично закрывают. Заполняют жидкостную компенсационную камеру жидкостью, идентичной с жидкостью ожидаемой окружающей среды, и устанавливают сетчатую защитно-ограничительную перегородку 42, закрепляют ее с помощью разрезного пружинного кольца 43 /Аналогичная перегородка 44 в полости 4 изготовлена непосредственно, в полости 4/. Затем на торцах полостей 4 и 5 устанавливают идентичные блоки адаптации 12 и 13 и герметично закрепляют их с помощью гаек 45 и 46 с отверстиями в их центрах для вывода штуцеров 29. Дополнительно места всех соединений герметизируют герметиком.
Параллельно со сборкой ГФУ соединяют его элементы по электрическим цепям и настраивают. Проверяют работоспособность всех блоков, элементов и ГФУ в целом.
Устройство работает следующим образом /см. фиг. 1, 2, 3, 4, 5, 6, 7/.
При изменении импульса переноса во внешней среде над квазинеподвижной поверхностью раздела создается вертикальный градиент импульса. Вследствие этого движение во внешней среде у поверхности раздела станет неустойчивым и распадется на отдельные вихри, которые создают пульсационный ход давления над поверхностью раздела, что приводит к образованию в более плотной фазе жидкости первичных капиллярных волн и изменению энергонасыщенности коротких волн в жидкостных линзах. Это, в свою очередь, приводит к образованию в резонаторе 14 волн, которые через мембрану 18 воздействуют на измерительную часть чувствительного элемента 16, что приводит к изменению выходного сигнала мостовой схемы включения чувствительного элемента 16, то есть измерительного блока 8. Под действием пульсационного хода давления над поверхностью раздела в 1 Па измерительная часть чувствительного элемента 16 испытывает относительную деформацию ε=5·10-6. Это приводит к относительным изменениям сопротивления и выходного, сигнала порядка 5·10-4, что соответствует выходному сигналу, равному 500 мкВ/Па и независимому от выходного сопротивления. В то же время воздействие структурных шумов приводит к изменению гидрологических характеристик, в том числе и импульса переноса, гидрофизического поля как в жидкой среде у упомянутой поверхности раздела, так и в жидкости, заключенной в жидкостной компенсационной камере в полости 5. Это приводит к созданию градиента импульса над квазинеподвижной поверхностью в жидкостной компенсационной камере и увеличивает величину градиента импульса во внешней среде у поверхности раздела и величину сигнала на выходе интегратора А1 электронного блока 7. Вследствие возникшего в жидкостной компенсационной камере в полости 4 градиента импульса движение у поверхности раздела станет неустойчивым и распадется на отдельные вихри, которые создают пульсационный ход давления над поверхностью раздела, что приводит к образованию в более плотной фазе жидкости первичных капиллярных волн и изменению энергонасыщенности коротких волн в жидкостных линзах. Наведенные в резонаторе 15 под воздействием структурных шумов волны, воздействуя через мембрану 19 на измерительную часть чувствительного элемента 17, вызывают изменение выходного сигнала мостовой схемы чувствительного элемента 17, то есть измерительного блока 9. В результате этого на выходе интегратора А2 электронного блока 7 возникнет сигнал, величина которого определяется только лишь уровнем структурных шумов.
Вследствие идентичности элементов 16 и 17, в частности, и измерительных блоков 8 и 9 вообще выходные сигналы интеграторов А1 и А2, обусловленные структурными шумами, будут равны.
Для выделения из смеси сигнал + шум составляющей структурных шумов на выходе интегратора А1, сигналы с выходов обоих интеграторов /А1 и А2/ подают на входы выходного дифференциального каскада A3 электронного блока 7, в котором производят компенсацию помех, обусловленных структурными шумами.
При изменении рабочих глубин в окружающей ГФУ среде происходит перераспределение гидрологических условий, обусловленное характером распределения различных параметров среды. Это приводит к снижению точности измерений малых изменений импульса переноса и ухудшению чувствительности ГФУ. Повышение точности измерений упомянутых величин без ухудшения чувствительности в период адаптации к внешним гидрологическим условиям достигается следующим образом.
При равенстве давлений в полости 4, например, Р1 /в полости 5 процесс адаптации протекает аналогично/ и внешней среды Р2, то есть при Р1=Р2 устройство адаптации 12 находится в ненагруженном состоянии /в нулевом положении/.
При P1<P2 /рабочая глубина увеличивается/ давление Р2 через штуцер 29 передается в полость сильфона 27, вызывая его перемещение. Это перемещение передается поршню 30, который вызывает растяжение /удлинение по образующей/ манжеты 32, одновременно ограничивая ее сужение по диаметру. Так как полость 4 герметизирована, то давление Р1 будет расти и достигнет значения P2. В этом случае /то есть при Р1=Р2/ перемещения сильфона 27 и поршня 30, а также растяжение манжеты 32 прекратятся. При понижении давления Р2 /рабочая глубина уменьшается/, то есть при Р1>Р2, под влиянием давления Р1 манжета 32 стремится восстановить свое первоначальное положение, вызывая тем самым перемещения в исходное /нулевое/ положение поршня 30 и сильфона 27 до тех пор, пока давления в полости 4 и во внешней среде не уравновесятся, то есть Р1=P2. Поскольку манжета 32 выполнена из высокоэластичного материала, в ней явления остаточной деформации практически не наблюдаются. Для ограничения перемещения блока адаптации 12 при недопустимых /аварийных/ перегрузках, что может вызвать разрыв элементов блока адаптации 12 и разгерметизацию полости 4, служат сетчатая защитно-ограничительная перегородка 44.
Сигналы с выхода дифференциального каскада 43 подают, например, на пост регистрации, индикации и управления для дальнейшей обработки и использования.
Предлагаемое ГФУ по сравнению с прототипом обладает следующими основными параметрами:
Таким образом, предлагаемое гидрофизическое устройство обеспечивает повышение точности измерения малых изменений импульса переноса в условиях воздействия структурных шумов по сравнению с прототипом, особенно в области малых /пороговых/ сигналов в 50-250 раз, предназначено для использования в системах обнаружения подводных целей типа ПДСС в условиях вибрационного воздействия корпуса корабля на заявляемое устройство за счет измерений структурных шумов, обусловленных упомянутыми вибрациями и их компенсации.
Заявляемое гидрофизическое устройство конструктивно просто, обладает улучшенными массо-габаритными характеристиками, технологично в изготовлении, в нем использованы элементы и узлы, серийно выпускаемые промышленностью. Изготовление составных элементов, например, чувствительных элементов, резонаторов, платы электронного блока не представляет технических трудностей.
Источники информации
1. Авторское свид. СССР № 1841054, заявка 3199887 от 17.05.1988 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИДРОФИЗИЧЕСКОЕ УСТРОЙСТВО | 1988 |
|
SU1841089A1 |
| ГИДРОФИЗИЧЕСКОЕ УСТРОЙСТВО | 1988 |
|
SU1841094A1 |
| ГИДРОФИЗИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ | 1987 |
|
SU1841084A1 |
| ГИДРОФИЗИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ | 1988 |
|
SU1841054A1 |
| ОБНАРУЖИТЕЛЬ ГИДРОЛОКАЦИОННЫХ СИГНАЛОВ | 1988 |
|
SU1841095A1 |
| Манометрический жидкостный термометр | 1986 |
|
SU1428941A1 |
| Камертонный плотномер для жидких сред | 1983 |
|
SU1087830A1 |
| Гидростатический датчик уровня жидкости | 1991 |
|
SU1793247A1 |
| МИКРОЭЛЕКТРОННЫЙ СКВАЖИННЫЙ ДАТЧИК АБСОЛЮТНОГО ДАВЛЕНИЯ | 2019 |
|
RU2726908C1 |
| ЧАСТОТОРЕЗОНАНСНЫЙ ЧУВСТВИТЕЛЬНЫЙ ЭЛЕМЕНТ ДИФФЕРЕНЦИАЛЬНОГО ДАВЛЕНИЯ И ЧАСТОТОРЕЗОНАНСНЫЙ ДАТЧИК ДИФФЕРЕНЦИАЛЬНОГО ДАВЛЕНИЯ | 2017 |
|
RU2690699C1 |

Изобретение относится к области измерения статистических характеристик гидрофизических полей жидкости и может быть использовано в системах гидролокации для обнаружения движущихся в погруженном положении в режиме полного молчания целей. Сущность: устройство состоит из герметичного корпуса (1) с крышкой (2), в котором выполнены три полости: полость (3) в нижней части и полости (4, 5) в верхней части. В полости (3) размещена плата (6) электронного блока, в полости (4) - измерительный и компенсационный преобразователи, а в полости (5) - жидкостная компенсационная камера, частично заполненная жидкостью, идентичной жидкости окружающей среды. Полости (4, 5) разделены на две части каждая сетчатыми перегородками, а на их торцах установлены идентичные блоки (12, 13) адаптации к изменяющимся внешним гидрологическим условиям. Измерительный и компенсационный преобразователи выполнены в виде измерительных блоков (8, 9), установленных диаметрально противоположно друг к другу. Измерительные блоки (8, 9) состоят из резонаторов (14, 15), заполненных инертной жидкостью, и чувствительных элементов (16, 17), соединенных с выполненными в виде мембран (18, 19) днищами соответствующих резонаторов (14, 15). Полость резонатора (14) соединена с окружающей средой через капилляры (26), а полость резонатора (15) соединена с жидкостью компенсационной камеры через капилляры, расположенные в плоскости, нормальной плоскостям мембраны (19). Электронный блок размещен в дополнительной герметичной камере, выполненной в корпусе (1) со стороны крышки (2). Технический результат: повышение точности измерения малых изменений импульса переноса в условиях воздействия структурных шумов. 7 ил.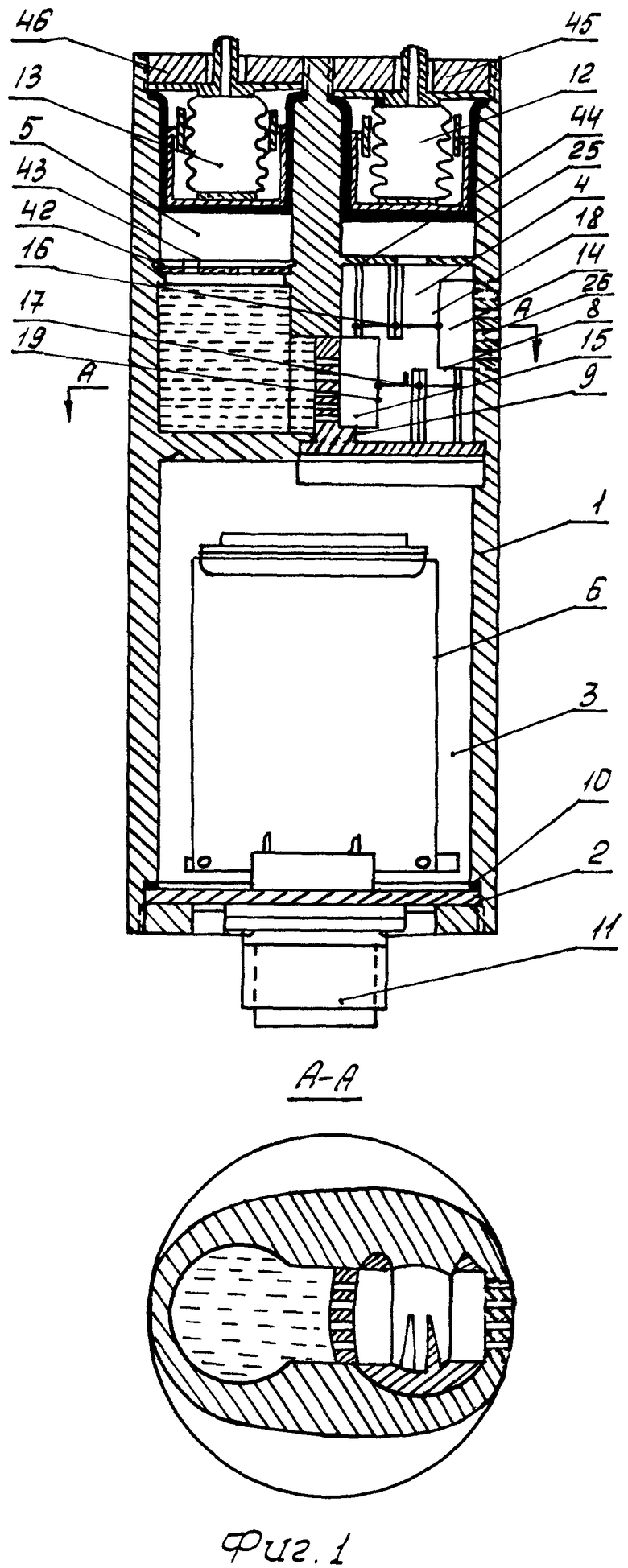
Гидрофизическое устройство, содержащее герметичный корпус с крышкой, электрически связанные между собой электронный блок, блоки адаптации, измерительный преобразователь и компенсационный преобразователь с жидкостной компенсационной камерой, а каждый преобразователь выполнен в виде измерительного блока с резонатором и чувствительным элементом, который расположен внутри полости корпуса и соединен с выполненным в виде мембраны днищем резонатора, размещенным на внутренней поверхности корпуса и заполненным инертной жидкостью, при этом полость резонатора измерительного преобразователя соединена с внешней средой, а компенсационного - с жидкой средой компенсационной камеры, через капилляры, расположенные в плоскости, нормальной плоскостям мембраны, отличающееся тем, что, с целью повышения точности измерения малых изменений импульса переноса в условиях воздействия структурных шумов, в нем измерительные блоки обоих преобразователей размещены в одной полости корпуса диаметрально противоположно, а компенсационная камера частично заполнена жидкостью, идентичной жидкости окружающей среды, при этом полости измерительных блоков и компенсационной камеры разделены каждая с одной стороны на две части сетчатыми перегородками, а с другой стороны в полостях установлены блоки адаптации, причем электронный блок размещен в дополнительной герметичной камере, выполненной в корпусе со стороны крышки.

