Предлагаемое изобретение относится к области измерения статистических характеристик гидрофизических полей жидкостей, в частности, к датчикам измерения мгновенных значений гидрологических характеристик жидкой среды и может быть использовано в системах гидролокации и навигационного обеспечения морских малых боевых средств, например, боевых пловцов (БП), движущихся в погруженном положении.
Известны устройства гидролокации и навигационного обеспечения боевых пловцов:
1. Оптические устройства /1/, например, прилагаемые к шлем-маске БП, подводные очки ночного видения (ПОНВ), которые состоят из двух входных оптических систем со скомпенсированными от преломления в воде оптических лучей сферическими стеклами на входе, двух электронно-оптических преобразователей и двух окуляров. Описанные ПОНВ осуществляют обзор пространства в угле, не превышающем 60°, и усиливают освещенность в зоне обзора в 104 раз. Рабочая глубина - не более 12 м. Дальность обзора - до 10 м. Электропитание - 1,3 В. Все элементы ПОНВ конструктивно жестко связаны.
Основным недостатком устройств данного типа является то, что в условиях ограниченной видимости (ночное время суток, сверхнизкая естественная освещенность и т.п.) они без подсвета практически не применимы. Кроме того, применение этих устройств ограничено рабочей глубиной и в условиях активного радиоэлектроакустического и оптического противодействия при ограниченной видимости невозможностью применения подсвета.
2. Портативные гидроакустические локаторы для боевого пловца.
Устройства данного типа состоят из антенной системы (АС), жестко укрепленной, например, на шлем-маске БП, звукового сигнализатора (ЗС), а также из заключенного в герметичный корпус блока обработки сигнала, состоящего из коммутатора приема-передачи (КПП), приемника сигналов (ПС), оконечного усилителя (ОУ) и генератора стандартных сигналов (ГСС). Дальность действия в активном режиме - не более 190 м. Гарантированное время работы по электропитанию в активном режиме - 10 ч, в пассивном - 20 ч. Наибольшая рабочая глубина - до 200 м, масса в воздухе - 45 кг. Рабочий диапазон частот - 200 кГц. В пассивном режиме описанный локатор позволяет улавливать шумы, издаваемые другими пловцами или подводными средствами движения, а также выйти на такие подводные объекты, которые либо являются источниками достаточно сильного шума, либо оборудованы гидроакустическими маяками.
Основным недостатком устройств данного типа является то, что при работе в пассивном режиме они не позволяют обнаружить нешумящие объекты, чем ограничивают возможности БП-носителя при ориентировании и выполнении боевых задач. При работе же этих устройств в активном режиме происходит демаскировка БП-носителя (что особенно опасно в условиях активного радиоэлектроакустического противодействия), что приведет к его обнаружению и в конечном счете лишает боевого пловца возможности выполнить поставленную перед ним задачу - нанесения ущерба атакуемому объекту или ведение разведки на необорудованной акватории (якорные стоянки, закрытые бухты, гавани и т.п.).
Общим недостатком устройств первого и второго типов является то, что они не обеспечивают в условиях активного радиоэлектроакустического и оптического противодействия возможности осуществлять обзор подводной обстановки в интересах решения боевым пловцом стоящих перед ним задач, особенно тогда, когда при указанных противодействиях БП вынужден ориентироваться и перемещаться в пространстве в режиме полного молчания, т.е. в режиме отсутствия излучения им энергии в ИК-, радио-, оптическом и акустическом диапазонах волн.
3. Гидрофизический локатор для боевого пловца. Устройство данного типа состоит из антенной системы (АС), выполненной на основе гидрофизического преобразователя по авт. свид. СССР №1841084, М.кл4 G01L 7/02, дата приоритета 05.01.1987 г., и жестко укрепленной на шлем-маске БП-носителя, блока обработки сигналов, размещенном в герметичном корпусе и укрепленном на нагрудном ремне гидрокостюма звукового сигнализатора (ЗС), расположенном внутри шлем-маски и связанном со слуховым аппаратом боевого пловца. Масса в воздухе - не более 550 г. Энергопотребление - не более 3,5 Вт, а в режиме адаптации - до 7 Вт. Неравномерность частотной характеристики выходного сигнала - не более 18 дБ. Коэффициент нелинейных искажений сигнала - не более 8%. Долговечность - 2000 ч. Дальность действия - не более 15 м. Срок работы по электропитанию - не менее 50 ч при использовании аккумуляторов типа СЦС-18. Рабочая глубина - не более 13,3 м для сильфонного датчика типа НС-14-10-01.
4. Гидрофизическое устройство (ГФУ). Это устройство имеет герметичный корпус с крышкой и тремя полостями - электронной, измерительной и компенсационной и содержит взаимосвязанные электронный блок, фронтальный и компенсационный измерительные блоки с чувствительными элементами, выполненными на основе полупроводникового кремниевого монокристалла, компенсационную жидкостную камеру и блоки адаптации, герметично установленные на торцах измерительной и компенсационной полостей. Фронтальный и компенсационный измерительные блоки содержат соответственно измерительный и компенсационный резонаторы, заполненные инертной жидкостью (более плотная фаза) и размещенные диаметрально противоположно на внутренней поверхности измерительной полости. Чувствительные элементы измерительных блоков соединены с выполненными в виде мембран днищами соответствующих резонаторов перпендикулярно плоскостям мембран. Полость измерительного резонатора соединена с внешней жидкой средой (менее плотная среда), а компенсационного - с жидкостью одного фазового состояния с внешней жидкой средой, заключенной в компенсационной жидкостной камере, через идентичные капилляры, выполненные в плоскостях, нормальных плоскостям мембран.
Устройство работает следующим образом.
В основу работы упомянутого устройства положено явление переноса импульса, которое наиболее полно описывает механизм силового взаимодействия твердого тела с жидкостью, а также гидрофизические особенности и закономерности явлений, возникающих на поверхностях раздела двух несмешиваемых жидкостей различных фазовых состояний и твердого тела.
При изменении импульса переноса во внешней среде, обусловленном локальными возмущениями, вызываемыми движущимся в погруженном положении объектом типа БП, в резонаторе фронтального измерительного блока под воздействием коротких волн, возбуждаемых в жидкостных линзах, наводятся колебания, которые воздействуют через мембраны на чувствительный элемент, что приводит к изменению выходного сигнала фронтального измерительного блока устройства. В то же время воздействие структурных шумов, обусловленных движением носителя, например, боевого пловца и работы его органов движения (ласты, ноги, туловище и т.п.), приводит к изменению гидрологических характеристик, в том числе и импульса переноса, гидрофизического поля как в окружающей устройство жидкой среде, так и в жидкости, заключенной в компенсационной камере. Это приводит к созданию вертикального градиента импульса над квазинеподвижной поверхностью в компенсационной камере и к образованию в более плотной среде жидкости первичных капиллярных волн и изменению энергонасыщенности волн в жидкостных линзах, сформированных в капиллярах. Наведенные в резонаторе компенсационного измерительного блока волны, воздействуя через мембрану на чувствительный элемент, вызывают изменение выходного сигнала компенсационного измерительного блока. Аналогичные дополнительные изменения выходного сигнала воздействие структурных шумов вызывает и на выходе фронтального измерительного блока. Оба сигнала подают на входы дифференциального каскада электронного блока, в котором производят компенсацию помех, обусловленных структурными шумами.
Устройства третьего и четвертого типов могут быть использованы в системах ориентирования боевых пловцов, поиска ими неподвижных подводных объектов, обнаружения в режиме полного молчания нешумящих движущихся целей в условиях активного радиоэлектроакустического и оптического противодействия.
Основным недостатком устройств третьего типа является зависимость их чувствительности и точности измерений от воздействия структурных шумов и др. факторов.
Практически упомянутыми недостатками устройство четвертого типа не обладает, но так же, как и устройства третьего типа, они не применимы для "водного счисления" пути боевого пловца путем измерения скорости его движения относительно окружающей среды. Это приводит в конечном счете к снижению эффективности средств навигационного обеспечения боевого пловца.
Однако устройства четвертого типа по своему функциональному назначению наиболее близко к предлагаемому и выбрано в качестве прототипа. Целью предлагаемого изобретения является повышение точности "водного счисления" пути боевым пловцом путем обеспечения возможности измерения его собственной скорости движения относительно окружающей среды в режиме полного молчания.
Поставленная цель достигается за счет того, что ГФУ, имеющее герметичный корпус с крышкой и с электронной, измерительной и компенсационной полостями и содержащее взаимосвязанные электронный, фронтальный (основной) и компенсационный измерительные блоки с чувствительными элементами, выполненными на основе полупроводникового кремниевого монокристалла, компенсационную жидкостную камеру и блоки адаптации, герметично установленные на торцах измерительной и компенсационной полостей, разделенных защитно-ограничительными перегородками, измерительные блоки содержат резонаторы, заполненные вязкой инертной жидкостью и размещенные диаметрально противоположно на внутренней поверхности измерительной полости, а чувствительные элементы соединены с выполненными в виде мембран днищами соответствующих резонаторов перпендикулярно плоскостям мембран, при этом полость резонатора фронтального измерительного блока соединена с внешней жидкой средой, а компенсационного - с заключенной в компенсационной жидкостной камере жидкостью одного фазового состояния с внешней жидкой средой, через капилляры, выполненные в плоскостях, нормальных плоскостям мембран, - к корпусу упомянутого ГФУ диаметрально противоположно плоскости открытых торцов капилляров резонатора фронтального измерительного блока, - перпендикулярно этой плоскости его наружной образующей корпуса жестко установлен боковой измерительный блок - измеритель статического давления во внешней жидкой среде, выполненный в виде пластины, закрытой сетчатой потокозащитной оболочкой так, что последняя составляет вместе с упомянутым корпусом общий корпус удлиненного симметричного профиля конечного размаха с постоянным отношением толщины к длине и с постоянным коэффициентом лобового сопротивления, в центре плоскости симметрии которого выполнено отверстие, в котором установлен с минимальным зазором воспринимающий элемент бокового измерительного блока, выполненный в виде плоской жесткой мембраны, и зафиксированный в этом отверстии с помощью упругих чувствительных элементов бокового измерительного блока, выполненных на основе полупроводникового кремниевого монокристалла и установленных взаимно перпендикулярно с противоположных сторон мембраны параллельно плоскости последней с предварительным натяжением, причем с одной стороны воспринимающий элемент с чувствительными элементами закрыт герметичным колпаком. Выходы схемы включения чувствительного элемента фронтального измерительного блока дополнительно подсоединены ко входам дифференциального усилителя, выход которого соединен со входом выходного дифференциального каскада, второй вход последнего подключен к выходу буферного каскада, соединенного своими входами с выходами бокового измерительного блока.
Такое построение устройства обеспечивает повышение точности "водного счисления" пути боевым пловцом путем обеспечения возможности измерения его собственной скорости движения относительно окружающей среды в режиме полного молчания благодаря тому, что чувствительный элемент фронтального измерительного блока воспринимает во время движения как составляющую всего воспринимаемого сигнала, содержащую информацию о динамическом давлении воды Pдин.
Сигналы чувствительных элементов бокового измерительного блока содержат информацию о статическом давлении жидкости Pстат. Разностные сигналы фронтального и бокового измерительных блоков пропорциональны квадрату скорости V движения боевого пловца-носителя относительно воды. Измерение скорости обеспечивает повышение точности "водного счисления" пути, чем достигается повышение надежности гидрологического восприятия окружающей жидкой внешней среды и повышает эффективность выполнения боевым пловцом стоящей перед ним боевой задачи.
Данное техническое решение соответствует критериям "существенные отличия" и "новизна", так как все перечисленные выше признаки в этой совокупности органически связаны, существенны, необходимы и достаточны для обеспечения поставленной задачи.
Все признаки в заявляемом устройстве известны порознь, но в той совокупности, в которой они заявлены в предложенном техническом решении, не встречаются ни в аналогах, ни в прототипе, ни в других источниках информации, доступных заявителю и авторам. При этом заявляемая совокупность признаков проявляет новое свойство, которое не обнаруживается ни в одном из известных объектов, а именно: измерять БП собственную скорость движения относительно окружающей среды в режиме полного молчания, что обеспечивает повышение точности "водного счисления" пути без уменьшения чувствительности и точности измерения других параметров, например, малых изменений импульса переноса в условиях воздействия структурных шумов, а также гидролокационных сигналов в области малых (пороговых) значений во всем диапазоне рабочих глубин.
Поэтому предложенное решение соответствует критериям "существенные отличия" и "новизна".
Сущность изобретения поясняется чертежами, на которых изображены:
на фиг. 1 - общий вид устройства;
на фиг. 2 - корпус устройства с электронным блоком;
на фиг. 3 - корпус конструкции фронтального и компенсационного измерительных блоков;
на фиг. 4 - резонатор компенсационного измерительного блока;
на фиг. 5 - блок адаптации;
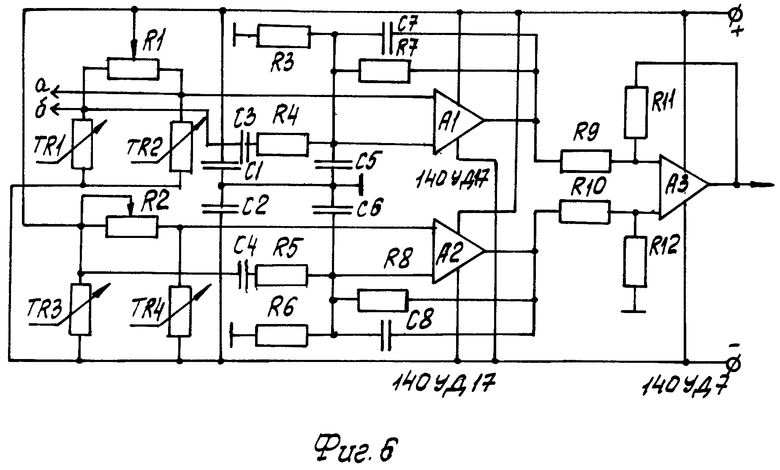
на фиг. 6 - электронный блок, схема принципиальная фронтального и компенсационного измерительных блоков;
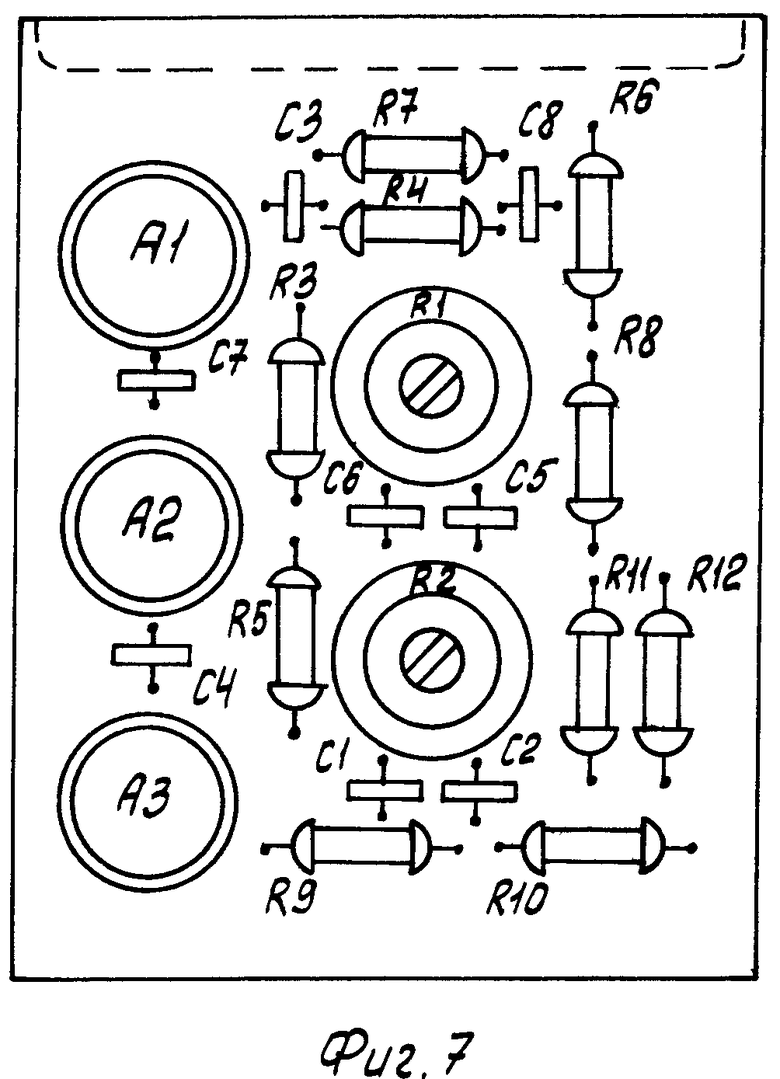
на фиг. 7 - электронный блок, схема монтажная фронтального и компенсационного измерительных блоков;
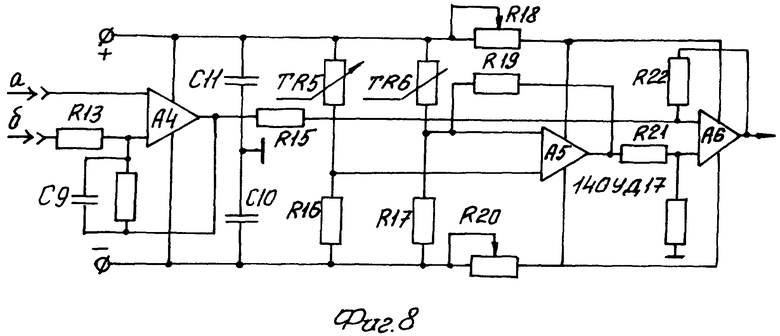
на фиг. 8 - электронный блок, схема принципиальная бокового измерительного блока с выходным каскадом;
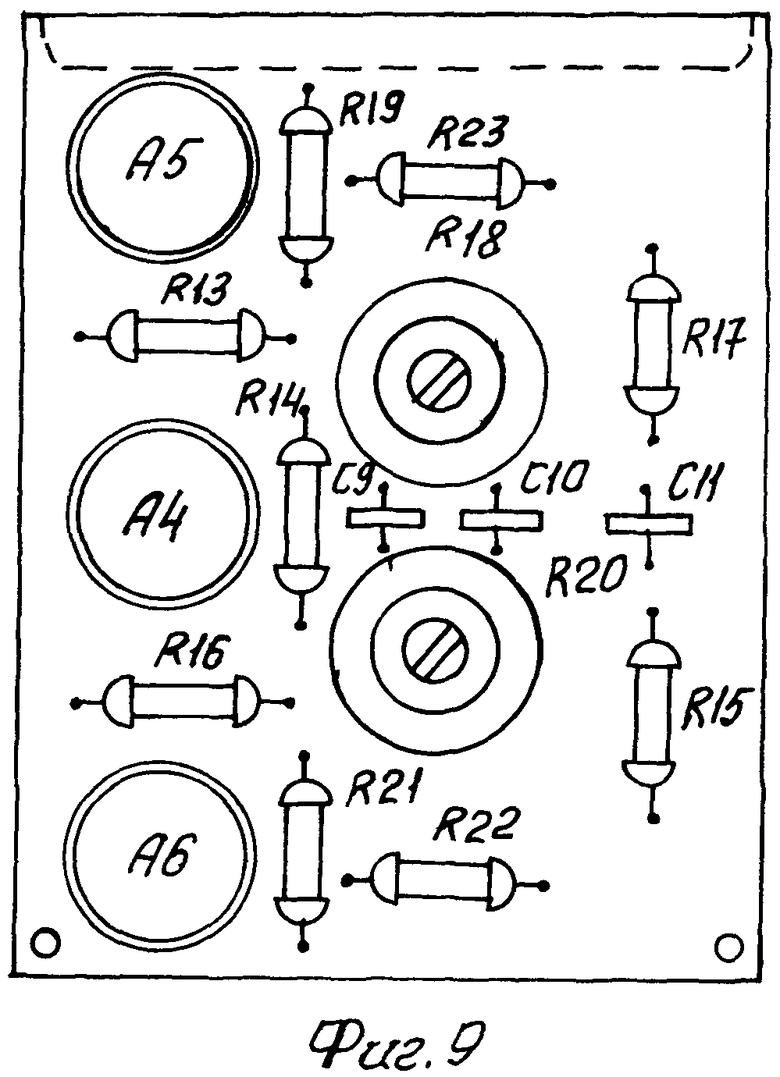
на фиг. 9 - электронный блок, схема монтажная бокового измерительного блока с выходным каскадом.
Гидрофизическое устройство (см. фиг. 1, 2) состоит из герметичного корпуса 1 с крышкой 2, в котором выполнены три полости 3, 4 и 5. В полости 3 размещены платы 6-1 и 6-2 электронного блока 7, в полости 4 размещены идентичные фронтальный 8 и компенсационный 9 измерительные блоки, а в полости 5 - компенсационная жидкостная камера. Полость 3 с помощью уплотнительной прокладки 10 герметично закрыта крышкой 2, в центре которой герметично закреплена приборная вилка 11 типа 2РМГД24Б10Ш5Е2. На торцах полостей 4 и 5 установлены идентичные блоки адаптации 12 и 13 к изменяющимся внешним гидрологическим условиям при изменении рабочей глубины. Диаметрально противоположно фронтальному измерительному блоку 8 по наружной образующей корпуса 1 жестко установлен боковой измерительный блок 14, закрытый сетчатой потокозащитной оболочкой 15 так, что последняя составляет вместе с корпусом 1 общий корпус 1А удлиненного симметричного профиля конечного размаха с постоянными отношением толщины к длине и с постоянным коэффициентом лобового сопротивления.
Фронтальный 8 и компенсационный 9 измерительные блоки состоят из идентичных резонаторов 16 и 17 и чувствительных элементов 18 и 19, выполненных на основе кремниевого полупроводникового монокристаллического сдвоенного тензорезистора с коэффициентом тензочувствительности K=(1÷1,2)·102 в виде тонкой струны диаметром 12-30 мкм с выводом от средней точки с утолщениями по концам и в середине для создания на них омических контактов с малой плотностью тока и состоят из двух симметричных рабочих частей - измерительной и термокомпенсационной. Одним из двух утолщений на концах чувствительный элемент 18 (а также и 19) жестко укреплен в центре днища резонатора 16 (17), выполненного в виде плоской прецизионной мембраны 20 (21) радиусом порядка 8 мм, перпендикулярно плоскости последней, а утолщением на другом конце (термокомпенсационной части) на жесткой опоре 22 (23) без растяжения-сжатия (см. фиг. 3). Средний вывод (утолщение) укреплен на контактной площадке 24 (25). Резонатор 17 компенсационного измерительного блока 9 выполнен в едином корпусе (см. фиг. 4) с блоком капилляров 26-1. Для предотвращения разрушения чувствительных элементов 18 и 19 во всем диапазоне измеряемых величин переходы между их рабочими частями и утолщениями выполнены по принципу стержня равного сопротивления. Такое выполнение переходов при недопустимых (аварийных) перегрузках вызывает плавный по определенному радиусу изгиб чувствительного элемента 18 (19) (точнее его измерительной части) без разрушения. Упругие силы возвращают чувствительный элемент 18 (19) после снятия упомянутых перегрузок в исходное положение без остаточных деформаций.
Резонаторы 16 и 17 размещены диаметрально противоположно на внутренней поверхности полости 4 корпуса 1. Внутренние полости резонаторов 16 и 17 заполнены инертной жидкостью (более плотная фаза), например, составом, изготовленным на основе полиметил-силоксановой жидкости типа ПМС ГОСТ 13032-77 или на основе кремнийорганической жидкости типа ПЭС-В ГОСТ 16480-70 не перемешиваемой с окружающей жидкой средой (менее плотная фаза) и идентичной с ней жидкостью, заключенной в компенсационной жидкостной камере, расположенной в полости 5. При этом полость резонатора 16 соединена с окружающей средой через капилляры 26-2, выполненные в корпусе 1 в плоскости нормальной к плоскости мембраны 20, а полость резонатора 17 соединена с жидкостью в компенсационной жидкостной камере через капилляры 26-1.
Блоки адаптации 12 (13) состоят (см. фиг. 5) из сильфона 27, закрытого с одного торца герметично, а с другого - фигурным фланцем 28 со штуцером 29, с помощью которого полость сильфона 27 соединена с внешней средой, цилиндра 30, с одного торца закрытого глухим днищем, а на другом торце с внутренней стороны жестко установлены направляющие 31, внутренний радиус которых равен радиусу наружной окружности гофров сильфона 27, а длина равна не менее двум периодам гофров сильфона 27, достаточная для плавного скольжения цилиндра 30 вдоль упомянутых гофров, на цилиндр 30 свободно одета герметичная с одного торца высокоэластичная манжета 32, а отбортовка манжеты 32 на противоположном торце служит для установки на торцах полостей 4 и 5 блоков адаптации соответственно 12 и 13 и герметизации их при помощи фигурного фланца 28 гайки 33 с отверстием в ее центре для вывода штуцера 29 сильфона 27.
В качестве сильфона 27 использованы стандартные сильфоны, например, серии НС ГОСТ 11915-72, рассчитанные на работу в различных диапазонах рабочих глубин (давлений). При этом фланец 28, штуцер 29, цилиндр 30 и направляющие 31, так же, как и сильфон 27, изготовлены из нержавеющей стали 36НХТЮ (ЭИ-702), что обеспечило высокое качество сварных соединений деталей блока адаптации 12 (13). Кроме того, применение упомянутого материала повышает стойкость блока адаптации 12 (13) к воздействию морской воды и увеличивает его долговечность. Манжета 32 изготовлена методом вулканизации в форме из высокоэластичных резиновых смесей, например, марки 111-1б-23 (Н0-68-1) ТУ 38-10510-82 или ИРП ТУ 38-103321-76. Связь между радиусом r поршня 30 с учетом толщины стенки манжеты 32 и свободным ходом l поршня 30 определяется выражением
где Vo - свободный объем внутренней полости;
Pu(hi) - дополнительное давление внешней среды, определяемое диапазоном рабочих глубин;
hi - рабочая глубина;
Po - давление над свободной поверхностью моря.
Максимальное значение величины lmax определяется максимальным удлинением сильфона 27 - Δlmax. Значение величины lmax может быть увеличено на величину Δl′ сжатием сильфона 27 с помощью манжеты 32 при его установке. Тогда lmax определится как
lmax=Δlmax+Δl′
Но в этом случае на эту же величину должна растягиваться и манжета 32 без остаточной деформации (с учетом ее установочного растяжения).
Боковой измерительный блок 14 состоит из воспринимающего элемента 34, выполненного в виде плоской жесткой мембраны, например, из титана и чувствительных элементов 35-1 и 35-2, выполненных по аналогии с чувствительными элементами 18 и 19, среднее утолщение которых служит только для механического крепления в центре симметрии, являющемся одновременно и центром массы воспринимающего элемента 34. Последний закреплен с помощью чувствительных элементов 35-1 и 35-2 в отверстии диаметром 10 мм, выполненном в центре плоскости симметрии корпуса 1А, с минимальным зазором порядка 0,1-0,2 мм и с одной стороны закрыт герметичным колпаком 36 с воздухом. Плоскость симметрии корпуса 1А представляет собой экран, предназначенный для ослабления эффекта акустического короткого замыкания. Сетчатая потокозащитная оболочка 15 обеспечивает значительное уменьшение генерируемого на поверхности экрана псевдозвукового давления и одновременно служит для предохранения бокового измерительного блока 14 от случайных механических повреждений. Форма корпуса 1А выбрана из условия обеспечения устранения дополнительных помех в виде вихревых образований в местах контакта измерительных блоков (фронтального и бокового) 8 и 14 с внешней средой.
Электронный блок 7 (см. фиг. 6, 7, 8, 9) состоит из схем включения чувствительных элементов 18, 19, 35-1 и 35-2 (TR1, 2; TR3, 4 и TR5, 6), собранных по мостовой схеме; интеграторов, выполненных на операционных усилителях А1 и А2 типа 140УД17 с активными (C7-R7 и C8-R8) и пассивными (C5-R4 и C6-R5) цепями интеграции, входы которых соединены с выходами соответствующих схем включения чувствительных элементов TR1, 2 и TR3, 4; а выходы - со входами выходного дифференциального усилителя, собранного на микросхеме A3 типа 140УД7, в котором производится компенсация вибрационных помех, обусловленных структурными шумами, и на выходе которого появляется сигнал, пропорциональный малым изменениям импульса переноса во внешней среде. Одновременно к выходам чувствительного элемента 18 - TR1, 2, подключен дополнительно дифференциальный усилитель, собранный на микросхеме А4 типа 140УД17, выход которого соединен с входом выходного дифференциального каскада, собранного на микросхеме А6 типа 140УД17, второй вход микросхемы А6 подключен дополнительно к выходу дифференциального усилителя, собранного на микросхеме А5 типа 140УД17, входы которой подсоединены к выходам TR5, 6.
Связь гидрофизического устройства с постом регистрации, индикации и управления осуществляется с помощью герметичной, водонепроницаемой приборной вилки 11, например типа 2РМГД24Б10Ш5Е2, которая связана с электронным блоком 7 и герметично укреплена на крышке 2.
Сборку ГФУ осуществляют следующим образом (см. фиг. 1, 2, 3).
В ячейки 37 и 38 корпуса конструкции измерительных блоков 8 и 9 герметично и жестко вставляют резонаторы 16 и 17. В центре днищ последних с помощью, например, эпоксидного клея типа "Спрут" и др., укрепляют омические контакты измерительных частей чувствительных элементов 18 и 19, средние точки которых также с помощью клея укрепляют на соответствующих им контактных площадках 24 и 25 так, чтобы измерительные части чувствительных элементов 18 и 19 были перпендикулярны взаимно параллельным плоскостям выполненных в виде прецизионных мембран 20 и 21 днищ резонаторов 16 и 17. Свободные омические контакты термокомпенсационных частей чувствительных элементов 18 и 19 без сжатия-растяжения укрепляют на контактных площадках жестких опор 22 и 23. Выводы от всех омических контактов чувствительных элементов 18 и 19 выводят через фланец 39, а место вывода герметизируют с помощью герметика, например, типа УТ-32 ТУ 38.1051386-80. Параллельно со сборкой упомянутой конструкции измерительных блоков 8 и 9 осуществляют сборку бокового измерительного блока 14. Для этого в установленном месте плоскости симметрии корпуса 1А жестко крепят плоскопараллельную пластину 40 с помощью, например, газо- или электросварки. В пластине 40 в центре симметрии корпуса 1А изготавливают отверстие, на кромке которого с помощью водоустойчивого эпоксидного клея, например типа "Спрут", крепят взаимно-перпендикулярно крайними утолщениями чувствительные элементы 35-1 и 35-2 предварительно поместив между ними воспринимающий элемент 34. После этого средние части чувствительных элементов 35-1 и 35-2 перемещают в противоположные стороны от плоскости воспринимающего элемента 34 перпендикулярно последнему и крепят с помощью эпоксидного клея типа "Спрут" на соответствующие контактные площадки 41, чем обеспечивают предварительное натяжение чувствительных элементов 35-1 и 35-2, при котором рабочее перемещение отцентрированного с помощью последних в упомянутом отверстии воспринимающего элемента 34 приводит при малых усилиях к большим изменениям сопротивлений чувствительных элементов 35-1 и 35-2. Зоны омических контактов защищены клеем, а электрические выводы чувствительных элементов 35-1 и 35-2 покрывают, например, кремний-органическим лаком. Полость, в которой расположен боковой измерительный блок 14, заливают низкомодульным (например, марки КЛТ) или полиуретановым составом, который одновременно служит для гидроизоляции чувствительных элементов 35-1 и 35-2 и для предотвращения локальных нарушений ламинарного потока жидкости, обтекающей боковой измерительный блок 14. Выводы от омических контактов чувствительных элементов 35-1 и 35-2 вводят в полость 3 корпуса 1, а места ввода герметизируют герметиком УТ-32. На пластине 40 герметично крепят колпак 36, закрывающий с одной стороны боковой измерительный блок 14.
Затем осуществляют сборку корпуса 1А путем жесткого соединения с корпусом 1 сетчатой потокозащитной оболочки 15. После этого с помощью направляющих 42 фронтальный 8 и компенсационный 9 измерительные блоки в сборе устанавливают в специальном пазе в полости 4 корпуса 1, закрепляют и заполняют упомянутой жидкостью полости резонаторов 16 и 17 и капилляры 26-1 и 26-2. На кронштейне 43, укрепленном в полости 3, устанавливают вилки 44 и 45 (например, типа МРН14-1) и с помощью однотипных с ними розеток 46 и 47 устанавливают платы 6-1 и 6-2, на которых размещены все элементы и узлы электронного блока 7. Свободные грани плат 6-1 и 6-2 фиксируют на кронштейнах 48 и 49. Полость 3 при помощи уплотнительной прокладки 10 и крышки 2, в которой предварительно жестко и герметично устанавливают приборную вилку 11 типа 2РМГД24Б10Ш5Е2, герметично закрывают. Заполняют компенсационную герметичную камеру жидкостью одного фазового состояния с жидкостью ожидаемой окружающей среды и устанавливают сетчатую защитно-ограничительную перегородку 50, закрепляют с помощью разрезного пружинного кольца 51 (аналогичная перегородка 52 изготовлена непосредственно в полости 4). Затем на торцах полостей 4 и 5 устанавливают идентичные блоки адаптации 12 и 13 и герметично закрепляют их с помощью гаек 53 и 54 с отверстиями в их центрах для выводов штуцеров 29. Дополнительно места всех соединений герметизируют герметиком.
Параллельно со сборкой ГФУ соединяют его блоки по электрическим цепям и настраивают. Проверяют работоспособность всех блоков, элементов и ГФУ в целом.
Устройство работает следующим образом (см. фиг. 1, 6, 8). На поверхности раздела двух фаз (две несмешиваемые жидкости) в результате различного межмолекулярного взаимодействия в соприкасающихся фазах обнаруживается направленная внутрь более плотной фазы равнодействующая сил, приложенных к площади слоя раздела. А на поверхности раздела между этими жидкостями и твердым телом свойства поверхностного натяжения вызывают особые явления, которые проявляются в образовании капиллярных волн при возмущениях внешней среды. В этом случае существование устойчивости и равновесия зависит от величины натяжений на поверхностях раздела и от степени смачивания. При этом внутри жидкости более плотной фазы, заключенной в капиллярах, формируются жидкостные линзы.
При изменении импульса переноса во внешней среде над квазинеподвижной поверхностью раздела создается вертикальный градиент импульса. Вследствие этого движение во внешней среде у поверхности раздела станет неустойчивым и распадется на отдельные вихри, которые создают пульсационный ход давления над поверхностью раздела, что приводит к образованию в более плотной фазе жидкости первичных капиллярных волн и изменению энергонасыщенности коротких волн в жидкостных линзах. Это, в свою очередь, приводит к образованию в резонаторе 16 волн, которые через мембрану 20 воздействуют на измерительную часть чувствительного элемента 18, что приводит к изменению выходного сигнала мостовой схемы включения чувствительного элемента 18. Под действием пульсационного хода давления над поверхностью раздела в 1 Па измерительная часть чувствительного элемента 18 испытывает относительную деформацию ε=5·10-6. Это приводит к относительным изменениям сопротивления и выходного сигнала порядка 5·10-4, что соответствует выходному сигналу равному 500 мкВ/Па и не зависящему от выходного сопротивления. В то же время воздействие структурных шумов, обусловленных воздействием на жидкую среду вибраций, появляющихся вследствие движения боевого пловца-носителя и работой его органов движения (ног в ластах, туловища и т.п.), приводит к изменению измеряемых гидрологических характеристик, в том числе и импульса переноса, гидрофизического поля как в жидкой среде у поверхности раздела, так и в жидкости, заключенной в компенсационной камере в полости 3. Это приводит к созданию градиента импульса над квазинеподвижной поверхностью в компенсационной жидкостной камере и увеличивает величину градиента импульса во внешней среде у поверхности раздела и величину сигнала на выходе интегратора А1. Вследствие возникшего в компенсационной жидкостной камере градиента импульса движение у поверхности раздела станет неустойчивым и так же, как в случае неустойчивости у поверхности раздела фронтального измерительного блока 8, приведет к изменению выходного сигнала схемы включения чувствительного элемента 19 компенсационного измерительного блока 9. В результате этого на выходе интегратора А2 возникнет сигнал, величина которого определяется только лишь уровнем структурных шумов. Вследствие идентичности фронтального 8 и компенсационного 9 измерительных блоков выходные сигналы интеграторов А1 и А2, обусловленные структурными шумами, будут равны. Для выделения из смеси сигнал + шум составляющей структурных шумов сигналы с выходов интеграторов А1 и А2 подают на входы выходного дифференциального усилителя A3, где производят компенсацию помех, обусловленных структурными шумами. Выход выходного дифференциального усилителя A3 служит основным выходом устройства.
При изменении рабочих глубин в окружающей ГФУ среде происходит перераспределение гидрологических условий, обусловленное характером распределения различных параметров среды. Это приводит к снижению точности измерений малых изменений импульса переноса и ухудшению чувствительности ГФУ. Повышение точности измерений упомянутых величин без ухудшения чувствительности в период адаптации к внешним гидрологическим условиям достигается следующим образом.
При равенстве давлений в полости 4, например, P1 (в полости 5 процесс адаптации протекает аналогично) и внешней среды P2, то есть при P1=P2 устройство адаптации 12 находится в ненагруженном состоянии (в нулевом положении). При P1<P2 (рабочая глубина увеличивается) давление P2 через штуцер 29 передается в полость сильфона 27, вызывая его перемещение. Это перемещение передается поршню 30, который вызывает растяжение (удлинение по образующей) манжеты 32, одновременно ограничивая ее сужение по диаметру. Так как полость 4 герметизирована, то давление P1 будет расти и достигнет значения P2, т.е. P1=P2. В этом случае перемещения сильфона 27 и поршня 30, а также растяжение манжеты 32 прекратятся. При понижении давления P2 (рабочая глубина уменьшается), то есть при P1>P2, под влиянием давления P1 манжета 32 стремится восстановить свое первоначальное положение, вызывая тем самым перемещение в исходное (нулевое) положение поршня 30 и сильфона 27, до тех пор пока давления в полости 4 и во внешней среде не уравновесятся, то есть P1=P2. Поскольку манжета 32 выполнена из высокоэластичного материала, в ней явления остаточной деформации практически не наблюдается. Для ограничения перемещения блока адаптации 12 при недопустимых (аварийных) перегрузках, что может вызвать разрыв элементов блока адаптации 12 и разгерметизацию полости 4, служит сетчатая защитно-ограничительная перегородка 52.
При движении боевого пловца в резонаторе 16 создается дополнительное давление Pдин, соответствующее динамическому напору, который через мембрану 20, воздействуя на измерительную часть чувствительного элемента 18, вызывает дополнительные изменения его сопротивления и выходного сигнала мостовой схемы включения чувствительного элемента 18, пропорциональные величине Pдин. Составляющую сигнала на выходе упомянутой мостовой схемы, соответствующую величине Pдин выделяют с помощью дифференциального усилителя, построенного на микросхеме А4, входы которой подключены к выходам мостовой схемы. Действие статического давления Pстат, обусловленное рабочей глубиной вызывает плоскопараллельное перемещение воспринимающего элемента 34, которое вызывает изменения сопротивления чувствительных элементов 35-1 и 35-2 и выходного сигнала мостовой схемы их включения. Конструкция бокового измерительного блока 14 приводит к тому, что при рабочем перемещении воспринимающего элемента 34 сопротивления чувствительных элементов 35-1 и 35-2 имеют равные по величине, но противоположные по знаку приращения. Это приводит к удвоению сигнала бокового измерительного блока 14. Наличие предварительного прогиба чувствительных элементов 35-1 и 35-2 позволило использовать эффект "разложения силы на канате", что привело к дополнительному повышению коэффициента умножения усилия, развиваемого воспринимающим элементом 34, который определяется соотношением площадей воспринимающего элемента 34 и поперечного сечения чувствительных элементов 35-1 и 35-2. Упомянутый выходной сигнал мостовой схемы включения подают на входы дифференциального усилителя А5. Сигналы с выходов дифференциального усилителя А4, содержащий информацию о Pдин, и дифференциального усилителя А5, содержащий информацию о Pстат, подают на входы дифференциального каскада, построенный на микросхеме А6, где осуществляют процесс вычитания Pстат из Pдин, и таким образом на выходе микросхемы А6, являющемся вторым выходом устройства, вырабатываются разностные сигналы ΔP=Pдин-Pстат, пропорциональные квадрату скорости движения боевого пловца-носителя относительно окружающей среды
ΔP=AV2,
где A=1/2ρcS - постоянная величина, характеризующая гидродинамические свойства внешней среды, боевого пловца и ГФУ;
ρ - плотность жидкости во внешней среде;
c - коэффициент лобового сопротивления;
S - суммарная площадь открытых торцов капилляров 26-2.
Сигналы с выходов микросхем A3 и А6 подают, например, на блок регистрации, индикации и управления для дальнейшей обработки и использования.
Таким образом, предлагаемое гидрофизическое устройство обеспечивает повышение точности "водного счисления" пути боевым пловцом-носителем путем обеспечения возможности измерения его собственной скорости движения относительно окружающей среды в режиме полного молчания.
Заявляемое гидрофизическое устройство технологично в изготовлении, в нем использованы элементы и узлы, серийно выпускаемые промышленностью. Изготовление составных элементов, например, чувствительных элементов, резонаторов, плат электронного блока и др. не представляет технических трудностей.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИДРОФИЗИЧЕСКОЕ УСТРОЙСТВО | 1988 |
|
SU1841055A1 |
| ГИДРОФИЗИЧЕСКОЕ УСТРОЙСТВО | 1988 |
|
SU1841089A1 |
| ГИДРОФИЗИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ | 1987 |
|
SU1841084A1 |
| ГИДРОФИЗИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ | 1988 |
|
SU1841054A1 |
| ОБНАРУЖИТЕЛЬ ГИДРОЛОКАЦИОННЫХ СИГНАЛОВ | 1988 |
|
SU1841095A1 |
| ЧАСТОТОРЕЗОНАНСНЫЙ ЧУВСТВИТЕЛЬНЫЙ ЭЛЕМЕНТ ДИФФЕРЕНЦИАЛЬНОГО ДАВЛЕНИЯ И ЧАСТОТОРЕЗОНАНСНЫЙ ДАТЧИК ДИФФЕРЕНЦИАЛЬНОГО ДАВЛЕНИЯ | 2017 |
|
RU2690699C1 |
| Устройство для измерения температуры | 1982 |
|
SU1051384A1 |
| ДАТЧИК ДИФФЕРЕНЦИАЛЬНОГО ДАВЛЕНИЯ | 2016 |
|
RU2645442C1 |
| Гидростатический датчик уровня жидкости | 1991 |
|
SU1793247A1 |
| Манометрический жидкостный термометр | 1986 |
|
SU1428941A1 |

Изобретение относится к области измерения статистических характеристик гидрофизических полей жидкостей. Гидрофизическое устройство содержит герметичный корпус с крышкой и тремя полостями, в которых расположены электронный, фронтальный и компенсационный измерительные блоки, компенсационную жидкостную камеру и блоки адаптации. На корпусе диаметрально противоположно плоскости открытых торцов капилляров резонатора фронтального измерительного блока перпендикулярно этой плоскости установлен боковой измерительный блок статического давления внешней среды, выполненный в виде пластины, закрытой сетчатой потокозащитной оболочкой, которая совместно с корпусом составляет удлиненный симметричный профиль, в центре плоскости симметрии которого выполнено отверстие, в котором установлен с зазором воспринимающий элемент. Воспринимающий элемент выполнен в виде плоской жесткой мембраны и зафиксирован в отверстии упругими чувствительными элементами, установленными взаимно перпендикулярно с противоположных сторон мембраны параллельно ее плоскости с предварительным натяжением. При этом воспринимающий элемент с чувствительными элементами закрыт с одной стороны герметичным колпаком. Технический результат - повышение точности измерений. 9 ил.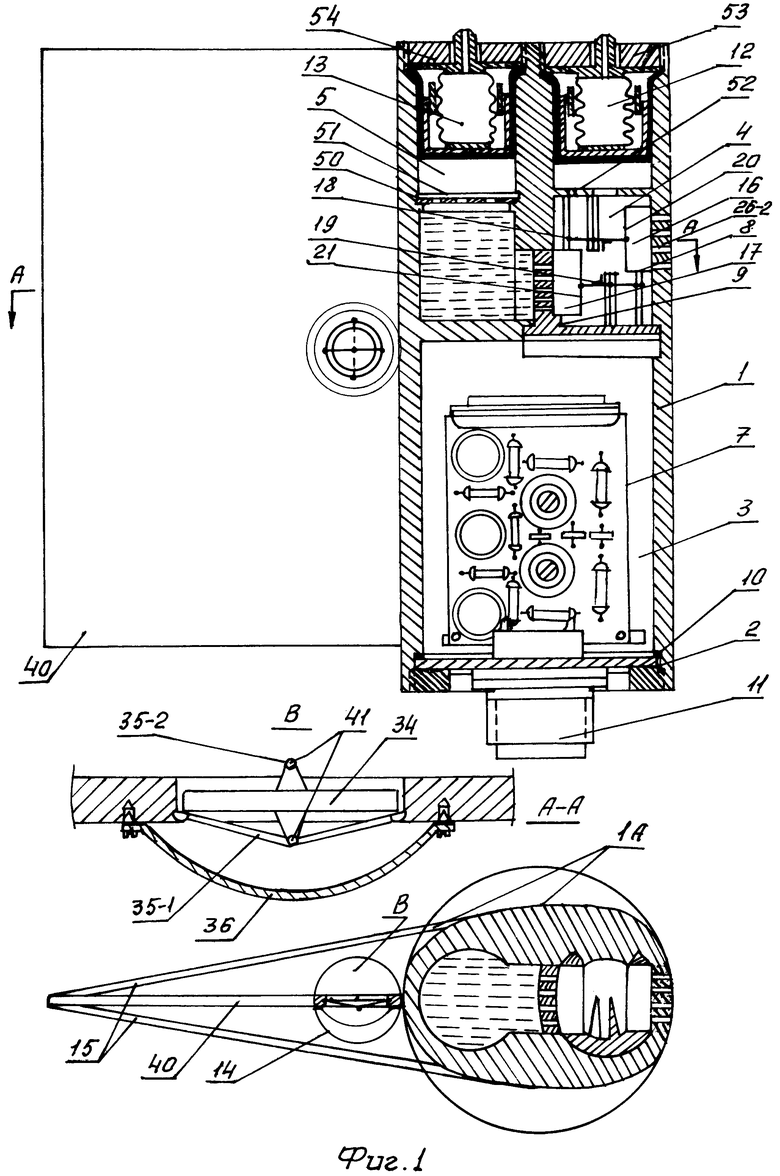
Гидрофизическое устройство, содержащее герметичный корпус с крышкой и с тремя полостями, в которых расположены электронный, фронтальный и компенсационный измерительные блоки с чувствительными элементами, выполненными на основе полупроводникового кремниевого монокристалла, компенсационную жидкостную камеру и блоки адаптации, герметично установленные на торцах измерительной и компенсационной полостей, разделенных защитно-ограничительными перегородками, резонаторы измерительных блоков заполнены вязкой инертной жидкостью и размещены диаметрально противоположно на внутренней поверхности измерительной полости, а чувствительные элементы соединены с выполненными в виде мембран днищами соответствующих резонаторов перпендикулярно плоскостям мембран, при этом полость резонатора фронтального измерительного блока соединена с внешней жидкой средой, а компенсационного с заключенной в его жидкостной камере жидкостью одного фазового состояния с внешней жидкой средой, через капилляры, выполненные в плоскостях нормальных плоскостям мембран, отличающееся тем, что, с целью повышения точности измерения пути путем измерения боевым пловцом-носителем собственной скорости движения относительно окружающей среды в режиме полного молчания, в нем на корпусе диаметрально противоположно плоскости открытых торцов капилляров резонатора фронтального измерительного блока перпендикулярно этой плоскости по наружной образующей корпуса жестко установлен боковой измерительный блок статического давления внешней среды, выполненный в виде пластины, закрытой сетчатой потокозащитной оболочкой, которая совместно с корпусом составляет удлиненный симметричный профиль конечного размаха с постоянным отношением толщины к длине и с постоянным коэффициентом лобового сопротивления, в центре плоскости симметрии которого выполнено отверстие, в котором установлен с зазором воспринимающий элемент, выполненный в виде плоской жесткой мембраны и зафиксированный в отверстии упругими чувствительными элементами, установленными взаимно перпендикулярно с противоположных сторон мембраны параллельно ее плоскости с предварительным натяжением, воспринимающий элемент с чувствительными элементами закрыт с одной стороны герметичным колпаком, при этом к выходам схемы включения чувствительного элемента фронтального измерительного блока подсоединены входы дополнительного усилителя, к входу которого подключен своим входом выходной дифференциальный каскад, а ко второму входу выходного дифференциального каскада подключен выход буферного канала, причем вход его соединен с выходом бокового измерительного блока, а выход выходного дифференциального каскада является вторым выходом устройства.
| Технические средства обеспечения боевых пловцов | |||
| Морской сб | |||
| Печь-кухня, могущая работать, как самостоятельно, так и в комбинации с разного рода нагревательными приборами | 1921 |
|
SU10A1 |
| Горный компас | 0 |
|
SU81A1 |
| Авт | |||
| свид | |||
| ГИДРОФИЗИЧЕСКОЕ УСТРОЙСТВО | 1988 |
|
SU1841055A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |

