Изобретение относится к летательным аппаратам специального назначения, а именно к летательным аппаратам с радиолокационной аппаратурой для дистанционного зондирования земной (морской) поверхности, использующей многофункциональные многорежимные радиолокаторы с синтезированной апертурой антенны высокого разрешения (РСА ВР).
Современная концепция проектирования авиационных РСА ВР предусматривает создание многофункциональных многорежимных РСА, позволяющих получать радиолокационные изображения (РЛИ) с высоким разрешением, близким к разрешающей способности оптико-электронной аппаратуры дистанционного зондирования Земли, в прожекторном и картографическом режимах, режиме селекции движущихся целей [1, 2, 3]. Дополнительно вводятся интерферометрический режим и режим инверсного синтезирования [4, 5].
Ближайшим аналогом изобретения является многорежимная РСА высокого разрешения PAMIR (Phased Array Multifunctional Imaging Radar) с рабочей полосой частот сигнала Δfc=1820 МГц [1, 2, 3]. РСА PAMIR формирует РЛИ с заявленными разрешающими способностями 0,1 м на дальностях до 30 км и 0,3 м на дальностях до 100 км. В качестве антенной системы применена 256-канальная активная фазированная решетка (АФАР) размером 4,25×0,15 м и с суммарной импульсной мощностью излучения 1820 Вт. Управление лучом АФАР осуществляется электронным способом в азимутальной плоскости в пределах ±45 градусов и механическим способом в плоскости по углу места.
Недостатками многорежимной РСА высокого разрешения PAMIR являются:
1. Отсутствие электронного сканирования по углу места, что ограничивает номенклатуру режимов работы РСА ВР и возможность стабилизации луча АФАР при эволюциях летательного аппарата.
2. Небольшая суммарная импульсная мощность излучения ограничивает дальность действия РСА ВР.
3. Продольный размер антенной системы не позволяет формировать РЛИ в картографическом (полосовом) режиме с разрешающей способностью по азимуту лучше, чем 2,13 м.
4. Недостаточная ширина полосы приемопередающего тракта для обеспечения линейного разрешения по горизонтальной дальности порядка 0,1 м при углах антенны до 20 градусов.
Задачей изобретения является создание многофункциональной радиолокационной станции высокого разрешения с активной фазированной решеткой для пилотируемых и беспилотных летательных аппаратов с устранением указанных недостатков.
Технический результат, получаемый при решении поставленной задачи, выражается в расширении функциональных возможностей за счет введения в РСА ВР режима электронного сканирования по углу места, повышении суммарной импульсной мощности излучения АФАР при одновременном уменьшении ее размеров и обеспечении требуемой полосы приемопередающего тракта.
Заявляемый технический результат достигается за счет того, что многофункциональная радиолокационная станция высокого разрешения с АФАР для пилотируемых и беспилотных летательных аппаратов (ЛА) содержит гиростабилизированную антенную систему, блок управления, формирования и обработки сигнала, инерциальный измерительный блок микронавигации, причем гиростабилизированная антенная система содержит активную фазированную решетку, состоящую из подрешеток, распределительный блок, устройство управления антенной системой и коммутатор направления излучения, а блок управления, формирования и обработки сигнала содержит контроллер радиолокационной станции (РЛС), приемник-возбудитель, включающий в себя модуль промежуточной частоты (ПЧ) и модуль сверхвысокочастотного излучения (СВЧ), сигнальный процессор, включающий в себя синхронизатор, модуль предварительной обработки и модуль формирования РЛИ, вторичный источник питания, при этом первый вход контроллера РЛС соединен с интерфейсом системы управления ЛА, а второй вход - с инерциальным измерительным блоком микронавигации, первый выход контроллера РЛС соединен с коммутатором направления излучения антенной системы, второй выход - с устройством управления антенной системы, третий выход - с модулем ПЧ приемника-возбудителя, четвертый выход - с синхронизатором сигнального процессора, пятый выход - с источником вторичного питания, выходы синхронизатора сигнального процессора соединены с модулем ПЧ приемника-возбудителя и модулем предварительной обработки сигнального процессора, вход и выход модуля ПЧ соединен с модулем СВЧ, вход и выход модуля СВЧ соединены с распределительным блоком АФАР гиростабилизированной антенной системы, входы и выходы которого соединены с подрешетками АФАР, выход модуля ПЧ приемника-возбудителя соединен с модулем предварительной обработки сигнального процессора, первый выход которого соединен с системой регистрации радиоголограмм (РГЛГ), а второй выход - с модулем формирования РЛИ сигнального процессора, выход которого соединен с системой регистрации РЛИ, при этом АФАР гиростабилизированной антенной системы содержит подрешетки с приемопередающими каналами в конфигурации 16×4, а устройство управления антенной системой выполнено с возможностью электронного сканирования лучом антенной системы по азимуту и углу места, а также стабилизации луча при эволюции ЛА, при этом обеспечивается приемопередача и обработка сигнала до 2000 МГц, с возможностью формирования РЛИ в телескопическом режиме с разрешением 0,1 м при углах антенны до 20 градусов.
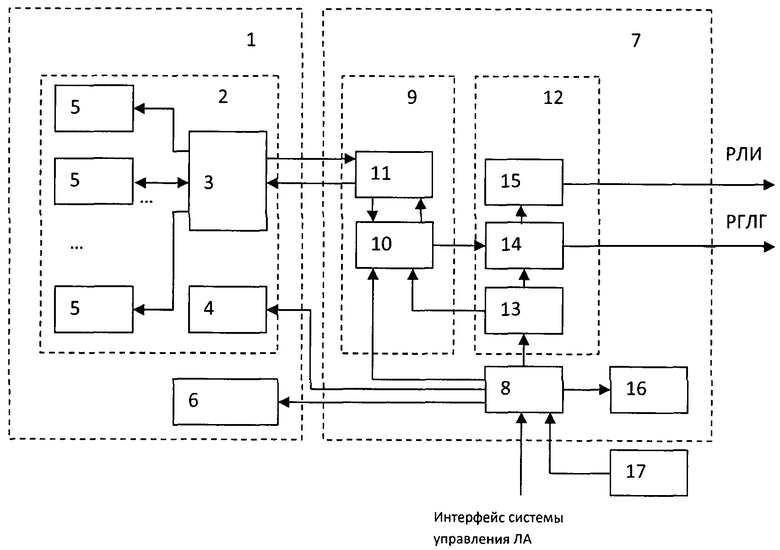
На чертеже приведена обобщенная блок-схема предлагаемой многофункциональной многорежимной РСА ВР с АФАР для пилотируемых и беспилотных летательных аппаратов. В состав РСА ВР входят:
1 - гиростабилизированная антенная система, включающая в себя АФАР - 2 и коммутатор направления излучения - 6, АФАР включает в себя: набор подрешеток - 5, количество которых может быть различным, распределительный блок - 3 и устройство управления - 4;
7 - блок управления, формирования и обработки сигнала, включающий в себя: контроллер РЛС - 8, приемник-возбудитель - 9, состоящий из модуля ПЧ - 10 и модуля СВЧ - 11, сигнальный процессор - 12, состоящий из синхронизатора - 13, модуля предварительной обработки -14 и модуля формирования РЛИ - 15, вторичный источник питания - 16; 17 - инерциальный измерительный блок микронавигации.
Управление режимами работы РСА ВР осуществляется контроллером РЛС (9) по командам, поступающим по интерфейсу связи с управляющей ЭВМ летательного аппарата. Контроллер РЛС вырабатывает команды управления блоками РСА ВР. Синхронизация работы всех блоков и устройств осуществляется синхронизатором (13) сигнального процессора (12). Синхронно с импульсами запуска передатчика, вырабатываемыми синхронизатором, в модуле ПЧ цифровым способом формируются импульсы возбуждения передающего тракта с линейной частотной модуляцией (ЛЧМ). Ширина спектра ЛЧМ импульсов для линейной разрешающей способности на РЛИ по координате горизонтальной дальности определяется из соотношения:
 ,
,
где kрв=1,373 - коэффициент ухудшения разрешения за счет применения весовой функции Хемминга, kpв=1,03 - коэффициент ухудшения разрешения за счет искажений в приемопередающем тракте РСА, с=3·108 м/с - скорость распространения радиоволн, δу - линейное разрешение по горизонтальной дальности, γ - угол между направлением наблюдения (угол антенны) и земной поверхностью. Для разрешения на РЛИ в телескопическом режиме δу=0,1 м и углов антенны γ до 20 градусов полоса сигнала составляет величину Δfc=2000 МГц.
В модуле СВЧ (11) приемника-возбудителя эти импульсы переносятся на несущую частоту, подаются в передающий тракт АФАР (1) и излучаются в пространство.
Для электронного управления лучом антенной системы по углу места в состав подрешеток АФАР введены дополнительные каналы в вертикальной плоскости, а для обеспечения требуемых энергетических характеристик применены выходные усилители с пиковой мощностью 10 Вт в каждом канале. Конфигурация одной подрешетки представляет собой 16×4 широкополосных приемопередающих каналов. Электронное управление реализуется с помощью фазовращателей и линий задержки, управляемых устройством управления (4). Таким образом, в АФАР, состоящей из восьми подрешеток, общее число каналов составило 512, суммарная импульсная мощность излучения доведена до 4608 Вт при размерах излучающего полотна 2,43×0,15 м. Азимутальный размер антенной системы позволил обеспечить разрешающую способность по азимуту формируемого РЛИ в полосовом режиме порядка 1,22 м. Увеличенная суммарная мощность излучения позволяет формировать РЛИ с разрешением 0,1 м на дальностях до 95 км, а с разрешением 0,3 м - до 160 км.
Коммутатор направления излучения (6) обеспечивает изменение направления зондирования с левого или правого борта летательного аппарата.
Принятые АФАР (1) отраженные сигналы через приемопередающие каналы подрешеток и распределительный блок (3) поступают в приемник-возбудитель (9), где в смесителе модуля 11 осуществляется преобразование СВЧ-сигнала в импульсы промежуточной частоты. Далее в модуле ПЧ (10) сигнал подвергается усилению и преобразованию в квадратурный комплексный видеосигнал. С выхода модуля ПЧ видеосигналы поступают в модуль предварительной обработки (14) сигнального процессора (12), где производится их аналогоцифровое преобразование, предварительная фильтрация и форматирование для выдачи по высокоскоростному интерфейсу цифровых отсчетов РГЛГ в устройство бортовой регистрации или радиолинию для передачи на наземные пункты приема и обработки.
Одновременно, цифровые отсчеты РГЛГ поступают в модуль формирования РЛИ (15), где производится их обработка в реальном масштабе времени. Сформированное цифровое РЛИ по высокоскоростному интерфейсу поступает в устройство бортовой регистрации или радиолинию для передачи на наземные пункты приема и анализа.
Сигналы навигационного измерительного блока микронавигации (17) с помощью контроллера РЛС (8) передаются в модуль ПЧ (10) приемника-возбудителя (9) для работы устройства компенсации траекторных нестабильностей ЛА и в сигнальный процессор (12) для включения в состав служебной информации, сопровождающей цифровые данные РГЛГ и РЛИ.
Таким образом, в предлагаемом изобретении АФАР гиростабилизированной антенной системы содержит подрешетки с приемопередающими каналами в конфигурации 16×4, обеспечивающими электронное сканирование лучом антенной системы по азимуту и углу места, что позволяет реализовать в РСА ВР дополнительную номенклатуру режимов работы (например, «SсаnSАR») и стабилизацию луча при эволюциях ЛА, а также увеличенную дальность действия за счет увеличения суммарной мощности излучения при уменьшении геометрических размеров излучающего полотна, что позволяет формировать РЛИ в полосовом режиме с лучшим разрешением, чем у прототипа РСА ВР, увеличенной шириной полосы тракта формирования, приемопередачи и обработки сигнала до 2000 МГц, что обеспечивает формирование РЛИ в телескопическом режиме с разрешением 0,1 м при углах антенны до 20 градусов. В результате, обеспечивается расширение функциональных возможностей многофункциональной радиолокационной станции за счет введения в РСА ВР возможности электронного сканирования по углу места, повышение суммарной импульсной мощности излучения АФАР при одновременном уменьшении ее размеров и обеспечении требуемой полосы приемопередающего тракта.
При том, что в заявке описан предпочтительный вариант осуществления настоящего изобретения, является очевидным, что такой вариант осуществления изобретения приведен только в качестве примера. Специалисты в данной области техники могут использовать многочисленные разновидности, изменения и замены, что не выходит за рамки изобретения.
Литература:
1. A.R. Brenner, J.H.G. Ender. Airborne SAR imaging with subdecimeter resolution. Proc. EUSAR' 2004, Germany.
2. A.R.Brenner, J.H.G. Ender «Demonstration of advanced reconnaissance techniques with the airborne SAR/GMTI sensor PAMIR». IEE Proc. - Radar, Sonar, Navigation, vol.153, no.2, pp.152-162, 2006.
3. H.Wilden, В. Poppelreuter, O.Saalmann, A.Brenner, J. Ender. «Design and realisation of the PAMIR antenna frontend.» Proc. EUSAR 2004, Germany.
4. H. Wilden, A. Brenner, O. Peters. O.Saalmann, B. Poppelreuter. «New frontend configuration of PAMIR for GMTI and interferometric SAR purposes». Proc. EUSAR 2006, Germany.
5. A.R. Brenner, L.Roessing, «Very high resolution SAR interferometry of urban areas». Proc. EUSAR 2008, Germany.
| название | год | авторы | номер документа |
|---|---|---|---|
| Многофункциональный бортовой радиолокационный комплекс | 2017 |
|
RU2670980C9 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ КРУГОВОГО ОБЗОРА | 2012 |
|
RU2522982C2 |
| КОСМИЧЕСКИЙ МНОГОРЕЖИМНЫЙ РАДИОЛОКАТОР С СИНТЕЗИРОВАННОЙ АПЕРТУРОЙ СО СКАНИРУЮЩЕЙ ГИБРИДНО-ЗЕРКАЛЬНОЙ АНТЕННОЙ | 2023 |
|
RU2826709C1 |
| Малогабаритная многорежимная бортовая радиолокационная система для оснащения перспективных беспилотных и вертолетных систем | 2018 |
|
RU2696274C1 |
| СПОСОБ И УСТРОЙСТВО ФОРМИРОВАНИЯ ПОЛЯРИЗАЦИОННОГО ПОРТРЕТА ЗЕМНОЙ ИЛИ МОРСКОЙ ПОВЕРХНОСТИ В ДВУХЧАСТОТНОЙ ЦИФРОВОЙ РСА | 1999 |
|
RU2166774C2 |
| Многофункциональная малогабаритная радиолокационная система для летательных аппаратов | 2016 |
|
RU2630278C1 |
| Способ картографирования земной поверхности бортовой радиолокационной станцией | 2016 |
|
RU2626012C1 |
| СПОСОБ ФРОНТАЛЬНОГО СИНТЕЗИРОВАНИЯ АПЕРТУРЫ АНТЕННЫ ЗЕМНОЙ ПОВЕРХНОСТИ С ИСКЛЮЧЕНИЕМ СЛЕПЫХ ЗОН В ПЕРЕДНЕЙ ЗОНЕ С ПОМОЩЬЮ МНОГОПОЗИЦИОННОЙ РАДИОЛОКАЦИОННОЙ СИСТЕМЫ | 2014 |
|
RU2560082C2 |
| КОРОТКОИМПУЛЬСНЫЙ РАДИОЛОКАТОР С ЭЛЕКТРОННЫМ СКАНИРОВАНИЕМ В ДВУХ ПЛОСКОСТЯХ И С ВЫСОКОТОЧНЫМ ИЗМЕРЕНИЕМ КООРДИНАТ И СКОРОСТИ ОБЪЕКТОВ | 2014 |
|
RU2546999C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ С СИНТЕЗИРОВАНИЕМ АПЕРТУРЫ И КВАЗИНЕПРЕРЫВНЫМ ИЗЛУЧЕНИЕМ | 2012 |
|
RU2510685C2 |
Изобретение относится к летательным аппаратам с радиолокационной аппаратурой для дистанционного зондирования земной (морской) поверхности. Радиолокационная станция содержит гиростабилизированную антенную систему, блок управления, формирования и обработки сигнала, инерциальный измерительный блок микронавигации. Гиростабилизированная антенная система содержит активную фазированную решетку, состоящую из подрешеток, распределительный блок, устройство управления антенной системой и коммутатор направления излучения. Блок управления, формирования и обработки сигнала содержит контроллер радиолокационной станции, приемник-возбудитель. Приемник-возбудитель включает в себя модуль промежуточной частоты и модуль сверхвысокочастотного излучения, сигнальный процессор. Сигнальный процессор включает в себя синхронизатор, модуль предварительной обработки и модуль формирования радиолокационного изображения, вторичный источник питания. Устройство управления антенной системой выполнено с возможностью электронного сканирования лучом антенной системы по азимуту и углу места, а также стабилизации луча при эволюции летательного аппарата. Технический результат заключается в расширении функциональных возможностей многофункциональной радиолокационной станции за счет возможности электронного сканирования по углу места, повышении суммарной импульсной мощности излучения активной фазированной решетки. 1 ил.
Многофункциональная радиолокационная станция высокого разрешения с активной фазированной решеткой (АФАР) для пилотируемых и беспилотных летательных аппаратов (ЛА), содержащая гиростабилизированную антенную систему, блок управления, формирования и обработки сигнала, инерциальный измерительный блок микронавигации, причем гиростабилизированная антенная система содержит активную фазированную решетку, состоящую из подрешеток, распределительный блок, устройство управления антенной системой и коммутатор направления излучения, а блок управления, формирования и обработки сигнала содержит контроллер радиолокационной станции (РЛС), приемник-возбудитель, включающий в себя модуль промежуточной частоты (ПЧ) и модуль сверхвысокочастотного излучения (СВЧ), сигнальный процессор, включающий в себя синхронизатор, модуль предварительной обработки и модуль формирования радиолокационного изображения (РЛИ), вторичный источник питания, при этом первый вход контроллера РЛС соединен с интерфейсом системы управления ЛА, а второй вход - с инерциальным измерительным блоком микронавигации, первый выход контроллера РЛС соединен с коммутатором направления излучения антенной системы, второй выход - с устройством управления антенной системы, третий выход - с модулем ПЧ приемника-возбудителя, четвертый выход - с синхронизатором сигнального процессора, пятый выход - с источником вторичного питания, выходы синхронизатора сигнального процессора соединены с модулем ПЧ приемника-возбудителя и модулем предварительной обработки сигнального процессора, вход и выход модуля ПЧ соединен с модулем СВЧ, вход и выход модуля СВЧ соединены с распределительным блоком АФАР гиростабилизированной антенной системы, входы и выходы, которого соединены с подрешетками АФАР, выход модуля ПЧ приемника-возбудителя соединен с модулем предварительной обработки сигнального процессора, первый выход которого соединен с системой регистрации радиоголограмм (РГЛГ), а второй выход - с модулем формирования РЛИ сигнального процессора, выход которого соединен с системой регистрации РЛИ, при этом АФАР гиростабилизированной антенной системы содержит подрешетки с приемопередающими каналами в конфигурации 16×4, а устройство управления антенной системой выполнено с возможностью электронного сканирования лучом антенной системы по азимуту и углу места, а также стабилизации луча при эволюции ЛА, при этом обеспечивается прием-передача и обработка сигнала до 2000 МГц с возможностью формирования РЛИ в телескопическом режиме с разрешением 0,1 м при углах антенны до 20°.
| СПОСОБ ПОВЫШЕНИЯ РАДИОЛОКАЦИОННОГО РАЗРЕШЕНИЯ, СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ И СПОСОБ ДИСТАНЦИОННОГО ВЫЯВЛЕНИЯ СИСТЕМОЙ МАЛОРАЗМЕРНЫХ ОБЪЕКТОВ | 2004 |
|
RU2265866C1 |
| СПОСОБ ПОЛУЧЕНИЯ РАДИОЛОКАЦИОННОГО ИЗОБРАЖЕНИЯ ЗЕМНОЙ ПОВЕРХНОСТИ ПРИ ПОМОЩИ МНОГОПОЗИЦИОННОЙ РАДИОЛОКАЦИОННОЙ СИСТЕМЫ С СИНТЕЗИРОВАННОЙ АПЕРТУРОЙ АНТЕННЫ | 2004 |
|
RU2278398C2 |
| US 5557283 A, 17.09.1996. | |||

