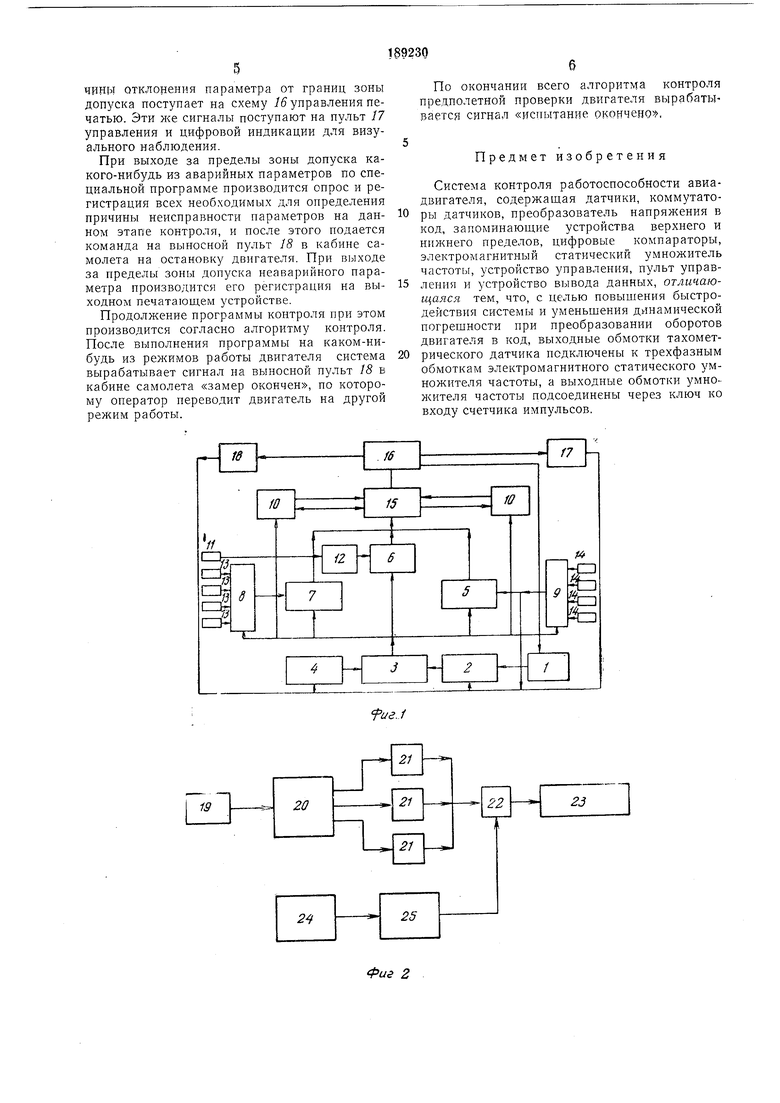
Известны системы контроля работоспособности авиадвигателя, содержащие датчики, коммутаторы датчиков, преобразователь напряжения в код, запоминаюндие устройства верхнего и нижнего пределов, цифровые компараторы, устройство управления и пульт управления и устройство вывода данных. Предложенная система отличается от известных тем, что выходные обмотки тахометрического датчика нодключены к трехфазным обмоткам электромагнитного статического умножителя частоты, а выходные обмотки умножителя частоты подсоединены через ключ ко входу счетчика импульсов. Это повышает быстродействие системы и уменьшает динамическую погрешность при преобразовании оборотов двигателя в код. На фиг. 1 показана блок-схема системы; на фиг. 2 - схема канала преобразования оборотов в код; на фиг. 3 - схема соединения выходных обмоток электромагнитного статического умножителя частоты; на фиг. 4 - временная диаграмма выходных импульсов; на фиг. 5 - схема цифрового компаратора. Система содержит выводно-печатающее устройство , выход синхронизатора которого подан на схему 2 управления режимами работы. Выходы схемы 2 соединены со схемой 3 управления выборкой адресов, на которую поданы выходы схемы 4 выбора комбинаций параметров. Выходы схемы 5 поданы на преобразователи 5 временных интервалов в код, преобразователь 6 оборотов в код, преобразователь 7 напряжения в код, релейный коммутатор S датчиков, коммутатор 9 сигналов исполнительных механизмов и запоминающие устройства 10 нижних и верхних пределов. Выход тахометрического датчика // оборотов соединен с входом электромагнитного статического умножителя частоты 12, а выход последнего подан на вход преобразователя 6 оборотов в код. Датчики 13, выдающие сигналы постоянного напряжения, соединены через релейный коммутатор датчиков с входом преобразователя 7 напряжения в код. Выходы датчиков 14 исполнительных механизмоБ через коммутатор 9 сигналов исполнительных механизмов поданы на преобразователь 7 временных интервалов в код, схему 2 и схему 4. Кодовые шины с выходов преобразователей 5, 6 и 7 поданы на вход цифрового компаратора 15, результаты анализа с которого через схему 16 управления печатью подаются для визуального наблюдения на пульт 17 управления аппаратурой и выносной пульт 18 в
Трехфазное напряжение тахометрического датчика 19 оборотов (см. фиг. 2) подано на вход электромагнитного статического умножителя частоты 20.
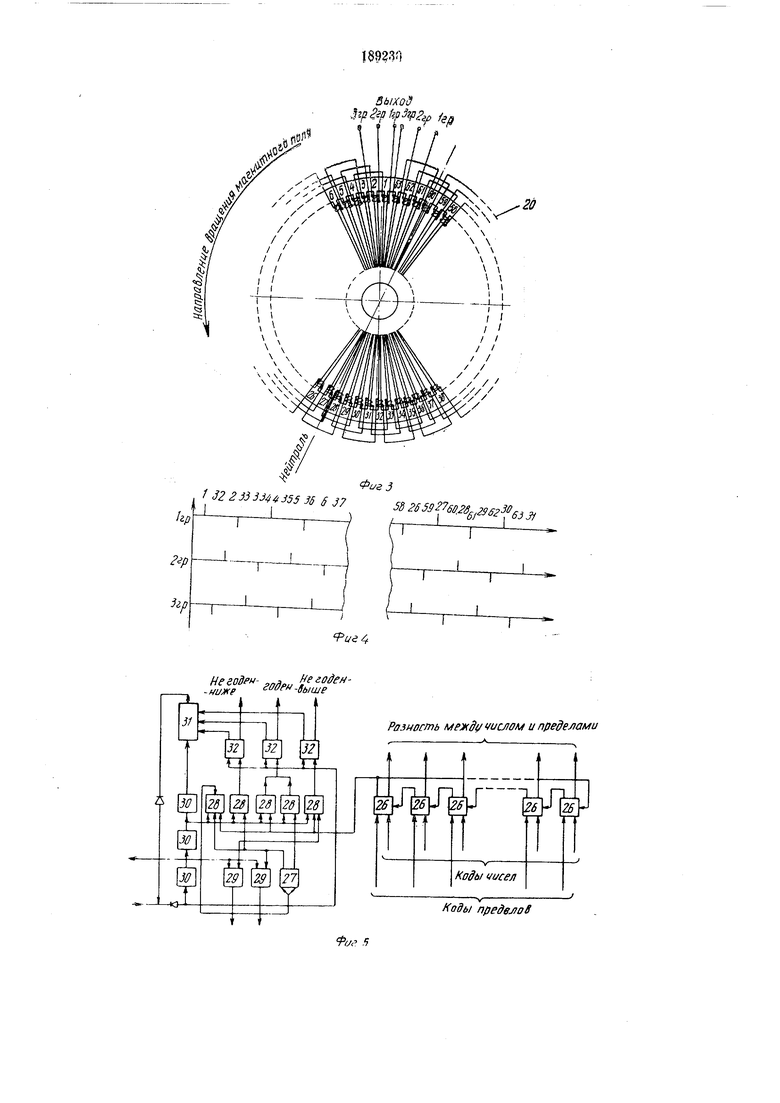
Электромагнитный статический умножитель частоты представляет собой трансформатор специальной формы (см. фиг. 3), в пазы которого уложена трехфазная входная обмотка возбуждения, соединенная звездой (не показана).
На стержнях умножителя, сечение которых выбирается таким образом, чтобы они находились в режиме насыщения, расположены выходные обмотки.
Вращающееся магнитное поле создает уплощенную волну результирующего магнитного поля и, вследствие сильного насыщения стержней, оно не вызывает в них существенного изменения величины магнитной индукции в течение большей части периода. Только в момент прохождения через стержень нейтрали вращающегося магнитного поля в стержне происходит резкое изменение магнитного состояния, внамотанной на нем катущке индуктируется кратковременный импульс.
Вследствие изменения величины напряжения датчика, которое поступает на силовую обмотку умножителя, степень насыщения магнитопровода меняется. Это приводит к взаимному влиянию импульсов смежных вторичных обмоток.. Чтобы устранить это влияние, вторичные обмотки умножителя разделены на три группы. Внутри каждой группы обмотки
соединены последовательно с щагом а - .
где N - число вторичных обмоток умножителя. За один оборот вращения магнитного поля нейтраль дважды пересекает вторичные обмотки и наводит в каждой обмотке два разнополярных импульса. Следовательно, за один оборот общее число импульсов в одной группе
N о
составляет - 2.
Каждая из групп выходных обмоток умножителя подана на свое формирующее устройство 21 (см. фиг. 2). После формирования импульсы со всех трех формирователей объединяются собирательной схемой ИЛИ (на схеме не показана), выход которой подан на схему электронного ключа 22, затем на электронный счетчик импульсов 23. Генератор 24 стабильной частоты управляет электронным ключом 22 через делитель 25 частоты.
Цифровой компаратор (см. фиг. 5) состоит из я одноразрядных двоичных вычислителей 26, соединенных так, что они образуют /г-разрядный двоичный вычитатель. Парафазный выход займа старщего разряда вычитателя и выходы одноразрядного счетчика 27 пределов поданы на группу схем совпадения 28 и 29. Кроме этого, на входы этих схем совпадения подают сигналы с цепочки из трех линий задержек 30. Конец цепочки через схему совпадения 31 соединен с ее началом гак, что она образует замкнутое кольцо.
Выходы схем совпадения 28 поданы на триггеры 32 качественного состояния параметров. Для формирования импульсов считывания кодов нижних и верхних пределов используются схемы совпадения 29, на входы которых подаются сигналы от счетчика 27 пределов и цепочки линии задержек 30.
Работа компаратора начинается с подачи импульса начала сравнения на вход цепочки
линий задержек 30, который с выхода первой из них поступает в регистры, хранящие коды числа и нижнего предела (на схеме не показаны). Этими сигналами на входы уменьщаемого я-разрядного вычитателя поступает код нижнего предела, а на входы вычитываемого - код числа, эквивалентного контролируемому параметру.
Если разность этих чисел отрицательна, то сигнал займа старщего разряда вычитателя и
нуль счетчика пределов открывают соответствующую схему совпадения 28 и импульс с выхода второй линии задержки 30 через открытую схему совпадения 28 изменений состояния одного из триггеров 32, который выдает сигнал «негоден - ниже.
Если разность положительна, то изменяется состояние счетчика пределов 27, а импульс начала сравнения, пройдя все линии задержки, возвращается на ее вход. С этого момента
аналогично производится сравнение числа с его верхним пределом.
Если число ниже верхнего предела, то вырабатывается сигнал «годен, если оно выще верхнего предела, то выдается сигнал «не годен - выще.
Такт работы аппаратуры начинается с приходом управляющ,его импульса с выносного пульта 18 в кабине летчика или с одного из датчиков 14 исполнительных механизмов на
схемы 2 управления режимом работы и схемы 4 выбора комбинации параметров. По этому сигналу выбирается один из режимов работы и нужная комбинация опрашиваемых параметров при циклическом опросе группы
датчиков. После этого импульс с синхронизатора выводного печатающего устройства / поступает на схему 3. На выходах этой схемы формируются сигналы, по которым выбираются адреса одного из преобразователей (5, 6
или 7) датчиков (13, 14} и адреса запоминающих устройств 10 нижнего или верхнего пределов.
Импзльсом, задержанным относительно импульса выборки адресов, начинается преобразование сигнала датчика в его дискретное значение. Импульс конца преобразования с одного из преобразователей (5, 6 или 7) поступает на цифровой компаратор 15, после чего на его входы поступают- коды из преобразователя (5, 6 или 7) и запоминающих устройств 10 пределов.
После окончания сравнения результат анализа в виде номера контролируемого параметра одного из трех сигналов «годен, «не ЧйНН отклонения параметра от границ зоны допуска поступает на схему /б управления печатью. Эти же сигналы поступают на пульт 17 управления и цифровой индикации для визуального наблюдения. При выходе за пределы зоны допуска какого-нибудь из аварийных параметров по специальной программе производится опрос и регистрация всех необходимых для определения причины неисправности параметров на данном этапе контроля, и после этого подается команда на выносной пульт 18 в кабине самолета на остановку двигателя. При выходе за пределы зоны допуска неаварийного параметра производится его регистрация на выходном печатающем устройстве. Продолжение программы контроля при этом производится согласно алгоритму контроля. После выполнения программы на каком-нибудь из режимов работы двигателя система вырабатывает сигнал на выносной пульт 18 в кабине самолета «замер окончен, по которому оператор переводит двигатель на другой режим работы. По окончании всего алгоритма контроля предполетной проверки двигателя вырабатывается сигнал «испытание окончено, Предмет изобретения Система контроля работоспособности авиадвигателя, содержащая датчики, коммутаторы датчиков, преобразователь напряжения в код, запоминающие устройства верхнего и нижнего пределов, цифровые компараторы, электромагнитный статический умножитель частоты, устройство управления, пульт управления и устройство вывода данных, отличающаяся тем, что, с целью повыщения быстродействия системы и уменьшения динамической погрещности при преобразовании оборотов двигателя в код, выходные обмотки тахометрического датчика иодключены к трехфазным обмоткам электромагнитного статического умножителя частоты, а выходные обмотки умножителя частоты подсоединены через ключ ко входу счетчика импульсов.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для коррекции временных искажений | 1985 |
|
SU1270797A1 |
| ПРЕОБРАЗОВАТЕЛЬ УГЛА ПОВОРОТА ВАЛА В НАПРЯЖЕНИЕ | 1987 |
|
RU2056700C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ПРИВОДАМИ АНТЕННОГО ПОСТА РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 2015 |
|
RU2587715C1 |
| Преобразователь угла поворота вала в код | 1982 |
|
SU1022202A1 |
| Преобразователь угловых перемещений в код | 1985 |
|
SU1311024A1 |
| ЦИФРО-АНАЛОГОВЫЙ БЕЗМОТОРНЫЙ СТЕНД | 1968 |
|
SU219833A1 |
| АВТОМАТИЧЕСКОЕ ИЗМЕРИТЕЛЬНОЕ И РЕГИСТРИРУЮЩЕЕ | 1964 |
|
SU165597A1 |
| Устройство для контроля параметров | 1985 |
|
SU1277138A1 |
| Устройство для многоканальной магнитной записи и воспроизведения сигналов с коррекцией временных искажений | 1990 |
|
SU1777178A1 |
| СЛЕДЯЩИЙ СИНУСНО-КОСИНУСНЫЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА В КОД СО ВСТРОЕННОЙ ЦИФРОВОЙ КОРРЕКЦИЕЙ ОШИБКИ ПРЕОБРАЗОВАНИЯ | 2020 |
|
RU2741075C1 |