Изобретение относится к универсальным автоматизированным системам управления приводами, преимущественно приводом азимутального вращения антенны со стабилизацией опорной платформы антенного поста корабельной радиолокационной станции.
Известно устройство наведения направленной антенны по патенту РФ №2010288, МПК G05B 11/01, публикация 30.03.1994 г.
Устройство содержит опорно-поворотный механизм с полярной осью, антенну, установленную на полярной оси, электропривод поворота антенны, датчик угла поворота и блок управления.
Недостатком устройства являются ограниченные функциональные возможности.
Известно также устройство управлении электроприводом по патенту РФ №2351972, МПК G05B 11/00, публикация 10.04.2009 г.
Устройство содержит блок выходных сигналов управления частотой вращения привода, блок выходного сигнала управления торможением, блок источника питания, блок формирования сигнала неисправности привода, блок усилителя мощности сигнала управления тормозом привода, блок отображения сигнала неисправности привода и блоки, предназначенные для остановки антенны на низкой частоте вращения в заданном и нулевом положении, для изменения частоты вращения, для торможения и расторможения.
Недостатками устройства является то, что управление вращением осуществляется только по одной координате, вращение только в одну сторону, установка в произвольный угол невозможна, режим сканирования не реализован, остановка в нулевом положении решена за счет упреждающего торможения с плавной доводкой до, управление двигателем осуществляется через дополнительный блок частотного преобразования, что ухудшает надежность системы, ухудшает ее массогабаритные характеристики, накладывает существенные ограничения на типы применяемых двигателей.
Наиболее близким аналогом, принятым за прототип предлагаемого изобретения, является система управления антенной радиолокационной станции по патенту РФ №2024907, МПК G05B 11/01, публикация 15.12.1994 г.
Система содержит задающее устройство, последовательно соединенные блок определения ошибки (измеритель рассогласования), блок пропорционально-интегрально-дифференциального регулятора и блок формирования выходных сигналов. В состав устройства входят также исполнительный механизм, антенна, датчик углового положения антенны, коммутатор, ограничители сигналов, усилители сигналов, усилитель мощности, исполнительный электродвигатель и редуктор.
Недостатком прототипа являются ограниченные функциональные возможности, отсутствие регулировки скорости вращения антенны и режима сканирования, невозможность остановки антенны в заданном положении.
Задачей, на решение которой направлено предлагаемое изобретение, является создание универсального автономного устройства управления несколькими приводами с различными типами двигателей и/или их комбинацией, а также с различными типами датчиков обратной связи.
Техническим результатом изобретения является повышение надежности, точности регулировки скорости вращения и остановки антенны в заданный угол с обеспечением стабилизации опорной платформы по крену и дифференту.
Сущность изобретения заключается в том, что в устройство управления приводами, содержащее канал отработки показаний датчика углового положения медленно вращающейся антенны (МВА), включающий последовательно соединенные блок определения ошибки, блок пропорционально интегрально дифференциального (ПИД) регулятора и блок формирования выходных сигналов управления двигателем, дополнительно содержит блок начальных установок, вход которого соединен с первым выходом блока управлении и ввода-вывода, а первый и второй выходы соединены соответственно с входом генератора сетки частот и входом блока аппроксимации углового положения быстро вращающейся антенны (БВА), выход которого соединен с первым входом блока управления и ввода-вывода, второй вход которого соединен с выходом блока автоматического выбора навигационного канала, а второй выход по сигналу заданного углового положения антенны соединен со вторым входом блока определения ошибки, кроме этого в канал отработки показаний датчика углового положения МВА введены блок возбуждения датчика угла и последовательно соединенные блок входных цепей, блок преобразователя фаза-амплитуда и блок преобразователя амплитуда-код, выход которого соединен с первым входом блока определения ошибки, при этом блок входных цепей выполнен с возможностью аналого-цифрового преобразования как напряжений, так и токовых сигналов в зависимости от типа датчика углового положения антенны, подключаемого к входу блока входных цепей, а блок преобразователя фаза-амплитуда выполнен с возможностью как преобразования фазы выходных сигналов блока входных цепей, так и непосредственной трансляции их на входы блока преобразователя амплитуда-код, входы начальной установки блока входных цепей, и блока преобразователя фаза-амплитуда соединены с третьим выходом блока начальных установок, к первому выходу генератора сетки частот подключены тактовые входы блока возбуждения датчика угла и блока входных цепей, ко второму выходу подключен тактовый вход блока преобразователя амплитуда-код, к третьему и четвертому выходам подключены соответствующие тактовые входы блока аппроксимации углового положения БВА, а к пятому - тактовый вход блока автоматического выбора навигационного канала, выход блока преобразователя амплитуда-код, на котором формируется код текущего углового положения МВА, соединен также с третьим входом блока управления и ввода-вывода, четвертый вход-выход которого предназначен для подключения канала связи с пультом управления радиолокационной станции.
Кроме этого устройство управления приводами дополнительно содержит каналы отработки показаний датчика крена и датчика дифферента опорной платформы, выполненные аналогично каналу отработки показаний датчика углового положения МВА.
Сущность изобретения поясняется чертежом блок схемы устройства, на котором обозначены:
1 - канал отработки показаний датчика углового положения медленно вращающейся антенны (МВА),
2 - канал отработки показаний датчика крена опорной платформы,
3 - канал отработки показаний датчика дифферента опорной платформы,
4 - блок входных цепей,
5 - блок преобразователя фаза-амплитуда,
6 - блок преобразователя амплитуда-код,
7 - блок определения ошибки (блок вычитания),
8 - блок пропорционально интегрально дифференциального регулятора,
9 - блок формирования выходных сигналов управления двигателем (далее по тексту - блок формирования выходных сигналов),
10 - блок начальных установок,
11 - генератор сетки частот,
12 - блок возбуждения датчика угла,
13 - блок аппроксимации углового положения быстро вращающейся антенны (БВА),
14 - блок автоматического выбора навигационного канала,
15 - блок управления и ввода-вывода, выполненный на основе процессорной платы и стандартных интерфейсных узлов,
16 - аналоговый ключ,
17 - дифференциальный усилитель,
18 - аналого-цифровой преобразователь,
19 - переключатель,
20 - фазовращатель на π/2,
21 - умножитель,
22 - электронный ключ,
23, 24 - умножители,
25 - блок значений Sin, Cos,
26 - блок вычитания,
27 - реверсивный счетчик,
28 - блок дифференцирования,
29 - усилитель,
30 - интегратор,
31 - сумматор,
32 - счетчик,
33 - блок значений Sin,
34 - цифроаналоговый преобразователь (ЦАП),
35 - усилитель,
36 - цифроаналоговый преобразователь,
37 - компаратор,
38 - усилитель,
39 - счетчик,
40 - регистр,
41 - делитель,
42 - счетчик,
43 - блок сравнения,
44 - счетчик,
45, 46, 47, 48 - универсальные асинхронные приемники,
49, 50 - мультиплексоры,
51, 52 - счетчики.
Устройство управления приводами антенного поста корабельной радиолокационной станции содержит канал 1 отработки показаний датчика углового положения МВА и каналы 2, 3 отработки показаний датчиков крена и дифферента, установленных на опорной платформе антенного поста. Блоки, входящие в состав каналов 2, 3, расположены в той же последовательности, имеют ту же схемную реализацию и так же, как блоки канала 1, связаны с остальными блоками устройствами, поэтому, для простоты, на фиг. 1 показан только пример выполнения канала 1.
Каждый из каналов 1, 2, 3 содержит блок 12 возбуждения датчика угла, а также последовательно включенные блок 4 входных цепей, блок 5 преобразователя фаза-амплитуда, блок 6 преобразователя амплитуда-код, блок 7 определения ошибки, блок 8 ПИД регулятора и блок 9 формирования выходных сигналов.
Кроме этого в состав устройства входят блок 10 начальных установок, вход которого соединен с первым выходом блока 15 управления и ввода-вывода, первый выход соединен с входом запуска генератора 11 сетки частот, второй выход соединен со вторым входом блока 13 аппроксимации углового положения БВА, а третий - с входами начальной установки (управляющими входами) блока 4 входных цепей и блока 5 преобразователя фаза-амплитуда. Первый вход блока 13 аппроксимации углового положения БВА соединяется с датчиком нулевого отсчета. К соответствующим выходам генератора 11 сетки частот подключены, как будет показано ниже, тактовые входы блока возбуждения датчика угла, блока 4 входных цепей, блока 5 преобразователя фаза-амплитуда, блока 6 преобразователя амплитуда-код, блока 13 аппроксимации углового положения БВА и блока 14 автоматического выбора навигационного канала, выход которого и выход блока 13 аппроксимации углового положения БВА соединены соответственно со вторым и первым входами блока 15 управления и ввода-вывода. Второй выход блока 15 управления и ввода-вывода соединен со вторым входом блока 7 определения ошибки, а четвертый вход-выход блока 15 ввода-вывода служит для подключения канала связи с центральным пультом управления РЛС.
Блок 4 входных цепей предназначен для аналого-цифрового преобразования Sin и Cos составляющих выходного сигнала датчика углового положения МВА и содержит две цепи из последовательно включенных аналогового ключа 16, дифференциального усилителя 17 и АЦП 18, тактовый вход которого соединен с первым выходом генератора 11 сетки частот. В зависимости от типа входного сигнала (напряжение или ток) и, соответственно, заданного положения ключа 16, дифференциальный усилитель может работать либо в режиме повторителя с подавлением синфазной помехи, либо преобразователя напряжения.
Блок 5 преобразователя фаза-амплитуда также содержит две параллельные цепи из последовательно соединенных переключателя 19, умножителя 21 и переключателя 22. В первом положении контактов переключателей 19, 22 выходные сигналы блока 4 непосредственно транслируются на входы умножителей 23, 24 блока 6 преобразователя амплитуда-код. Во втором его положении Sin составляющая сигнала через умножитель 21 подается на вход умножителя 23 Cos цепи, a Cos составляющая подается на вход умножителя 24 через фазовращатель 20 и умножитель 21 Sin цепи блока 5.
Выходы умножителей 23, 24 в блоке 6 преобразователя амплитуда-код соединены с входами вычитателя 26, выход которого соединен с входом переключения направления счета реверсивного счетчика 27, тактовый вход которого подключен ко второму выходу генератора 11 сетки частот, а выход, на котором формируется код текущего углового положения антенны, соединен с первым входом блока 7 определения ошибки, третьим входом блока 15 управления и ввода-вывода и входами блока 25 табличных значений Sin и Cos, выходы которого подключены ко вторым входам умножителей 23 и 24.
Выход блока 7 определения ошибки соединен с входами блока 28 дифференцирования, усилителя 29 и интегратора 30, выходы которых соединены с сумматором 31 блока 8 ПИД регулятора.
Блок 10 начальных установок выполнен на основе энергонезависимой памяти, в которой хранятся параметры настройки генератора 11 сетки частот и блоков в составе каналов 1, 2, 3 отработки показаний соответствующих датчиков.
Блок 12 возбуждения датчика угла содержит последовательно соединенные счетчик 32, тактовый вход которого подключен к первому выходу генератора 11 сетки частот, блок 33 значений Sin, ЦАП 34 и усилитель 35, выходной сигнал которого подается на обмотку датчика углового положения МВА.
Блок 13 аппроксимации углового положения БВА содержит последовательно включенные усилитель 38 и компаратор 37, второй (пороговый) вход которого соединен с выходом ЦАП 36, вход которого подключен ко второму выходу блока 10 начальных установок. Выход компаратора соединен с входом сброса счетчика 39, тактовый вход которого подключен к третьему выходу генератора 11 сетки частот, и входом записи регистра 40, вход данных которого соединен с выходом счетчика 39, а выход через делитель 41 соединен с первым входом блока 43 сравнения, второй вход которого подключен к выходу счетчика 42. Тактовый вход счетчика соединен с четвертым выходом генератора 11 сетки частот, а вход сброса подключен к выходу блока 43 сравнения, который соединен также со счетным входом счетчика 44, вход сброса которого соединен с выходом компаратора 37, а выход, на котором формируется код аппроксимации положения БВА, соединен с первым входом блока 15 управления и ввода-вывода.
Блок 14 автоматического выбора навигационного канала содержит четыре универсальных асинхронных приемника 45, …,48, выходы наличия сигналов которых соединены с входами мультиплексора 49, а выходы данных соединены с входами мультиплексора 50. Выход мультиплексора 49 соединен с входом обнуления счетчика 51, тактовый (счетный) вход которого подключен к пятому выходу генератора 5 сетки частот, а выход через счетчик-переключатель 52 соединен с управляющими входами мультиплексоров 49, 50. Выход мультиплексора 50 подключен ко второму входу блока 15 управления и ввода-вывода.
Блок 15 управления и ввода-вывода является ведомым, построен на основе процессорной платы и стандартных интерфейсных узлов, обеспечивающих двустороннее взаимодействие по 8 разрядной шине данных с внешними линиями выбора адреса и управления (4 вход-выход блока). Также блок 15 ввода-вывода обеспечивает передачу и прием данных от внутренних и к внутренним блокам, если внешней системой был выбран соответствующий адрес и переданы или запрошены новые данные.
Устройство работает следующим образом.
При включении питания (схема распределения электропитания не имеет непосредственного отношения к сущности изобретения и для простоты не рассматривается) блок 10 начальных установок в соответствии с хранящимися в памяти данными настраивает устройство для работы с теми типами датчиков углового положения (вращающиеся трансформаторы, оптические датчики, датчики Холла, тахогенераторы) и теми типами приводов, которые используются в данном антенном посту. Генератор 11 вырабатывает сетку необходимых частот для работы блоков устройства.
Для возбуждения обмоток датчиков углового положения счетчик 32, с тактовой частотой, заданной генератором 11, осуществляет выборку нового значения Sin из блока 33, которое поступает в ЦАП 34. После преобразования выходной аналоговый сигнал усиливается в усилителе 35 и поступает в датчик. Синхронная работа блока 12 возбуждения датчика и блока 4 входных цепей, осуществляющего аналого-цифровое преобразование выходного сигнала датчика, обеспечивается генератором 11 сетки частот.
Рассмотрим работу каналов 1, 2, 3 управления приводами антенного поста на примере описания работы канала 1 отработки показаний датчика углового положения медленно вращающейся антенны.
Sin и Cos составляющие сигнала от датчика углового положения MB антенны поступают на входы блока 4 входных цепей. В зависимости от типа сигнала (напряжение или ток) аналоговый ключ 16 находится в разомкнутом или замкнутом состоянии. Соответственно, дифференциальный усилитель 17 работает в режиме повторителя с подавлением синфазной помехи, либо преобразователя ток-напряжение. Затем аналоговый сигнал подается на АЦП 18, частота дискретизации которого устанавливается выходным сигналом с первого выхода генератора 11 сетки частот так, чтобы на период входного сигнала приходилось восемь отсчетов.
После этого отсчеты сигнала поступают на входы блока 5 преобразователя фаза-амплитуда. Отсчеты могут быть пущены непосредственно на входы блока 6, если нет необходимости в подобном преобразовании. Если такая необходимость есть, при наличии восьми отсчетов на период сигнала сдвиг фазы на 90 градусов осуществляется фазовращателем 20 путем простой задержки на два отсчета.
Задачей блока 6 преобразователя амплитуда-код является подбор такого значения кода вычисленного угла поворота антенны, чтобы он был максимально близок к фактическому оцифрованному коду углового положения вала датчика. Работа блока 6 режиме преобразователь амплитуда-код описывается математической формулой:

Работа в режиме преобразователь фаза-код описывается формулой:

где Θ - фактический угол, Φ - вычисленный угол, w - несущая частота, n - номер отсчета.
Следящий преобразователь 6 с помощью реверсивного счетчика 27 и блока 26 вычитания автоматически находит в блоке 25 такие значения Sin и Cos, которые вместе с отсчетами сигнала дают нулевую разность на вычитателе 26. Таким образом, выходной сигнал счетчика 27 и будет кодом угла поворота датчика при условии, что в блоке 25 табличных значений Sin и Cos хранится такое же количество отсчетов синусоидального сигнала на период, как и коэффициент пересчета счетчика 27.
Далее вычисленное значение кода угла антенны подается на первый вход блока 7 определения ошибки и на третий вход блока 15 управления и ввода-вывода, из которого через четвертый вход-выход транслируется в пультовой прибор радиолокационной станции. Заданное значение угла поворота антенны из пультового прибора через блок 15 передается на второй вход блока 7 определения ошибки, который определяет величину расхождения фактического положения антенны с заданным.
Значение вычисленной ошибки подается в блок 8 ПИД регулятора, в результате работы которого формируется сигнал управляющего воздействия для привода MB антенны. В блоке реализуется вычисление математической зависимости:

где K - коэффициент пропорциональности, Kd - дифференциальный коэффициент, Ki - интегральный коэффициент, dQ - ошибка углового положения, dQk - скорректированная ошибка положения, Qt - текущее угловое положение.
Затем выходной ПИД регулятора преобразуется в блоке 9 формирования выходных сигналов в сигнал с широтно-импульсной модуляцией.
При работе с двигателем постоянного тока (ДПТ) блок 9 может работать в режиме ШИМ-преобразователя с различной частотой модуляции в зависимости от постоянной времени двигателя. Таким образом, частота вращения двигателя регулируется не величиной постоянно подводимого напряжения, а длительностью импульсов питания двигателя номинальным напряжением, что позволяет делать приводные системы управления с высоким КПД.
В случае использования гидромотора блок 9 работает так же, как с ДПТ, выдавая ШИМ-импульсы на гидроусилители исполнительного механизма.
При работе с шаговыми двигателями блок работает в режиме электронного коммутатора, выдавая напряжение на обмотки управления, представляющее собой последовательность однополярных прямоугольных импульсов. Результирующий угол будет соответствовать числу переключений коммутатора, а частота вращения двигателя соответствует частоте переключений электронного коммутатора.
Одновременно для аппроксимации углового положения быстро вращающейся антенны выходной сигнал датчика нулевого положения БВА через усилитель 38 поступает на компаратор 37, в котором сравнивается с пороговым значением, установленным в ЦАП сигналом с третьего выхода блока 10 начальных установок. Счетчик 39 считает импульсы высокой частоты, поступающие с третьего выхода генератора 11 сетки частот. В моменты прохождения БВ антенной «нуля» значение счетчика сохраняется в регистре 40, а счетчик 39 обнуляется. Полученное значение является периодом вращения антенны, выраженным в тактах счетчика 39. Затем происходит деление периода счетчика на коэффициент аппроксимации (1024) в делителе 41. Полученный результат является периодом следования импульсов, аппроксимирующих скорость вращения БВ антенны. Счетчик 42 считает импульсы тактовой частоты, поступающие с четвертого выхода генератора 11, и полученное в нем значение сравнивается с периодом аппроксимации в блоке 43 сравнения. Как только значение совпадет, на выходе блока сравнения появляется импульс, обнуляющий счетчик 42. Таким образом, на выходе блока 43 сравнения формируется последовательность импульсов, частота следования которых в 1024 раза больше частоты вращения антенны. Счетчик 44 считает эти импульсы и на его выходе формируется код аппроксимации положения антенны в данный момент. Результат аппроксимации положения антенны поступает в блок 15 управления и ввода-вывода, который передает его в пультовой прибор РЛС.
Стабилизация пространственного положения опорной платформы антенного поста по крену и дифференту в условиях качки корабля осуществляется при взаимодействии с корабельными навигационными системами. При этом блок 14 осуществляет автоматический выбор навигационного канала. Сигналы от гироскопов поступают на входы асинхронных приемников 45, …, 48. Счетчик 51 является таймером с периодом ожидания 2 с, а счетчик 52 управляет переключением каналов приема. Если в течение пересчета таймера 51 сигнал не будет обнаружен на приемнике 45, то счетчик 51 вырабатывает импульс, увеличивающий состояние счетчика 52, переключающего мультиплексоры 49, 50 на следующий канал приема, от приемника 46. Если в нем будет обнаружен искомый сигнал, то мультиплексор 49 по сигналу наличия от приемника 46 обнуляет счетчик 51. Таким образом, при периоде повторения сигнала, меньшем, чем коэффициент пересчета таймера, канал будет захвачен, а данные через мультиплексор 50 будут переданы в блок 15 управления и ввода-вывода. При отсутствии сигнала в течение времени, превышающего коэффициент пересчета таймера, осуществляется переключение на следующий канал приема, от приемника 47.
Данные о крене и дифференте, полученные из навигационных систем, блок 15 управления и ввода-вывода выдает на второй вход блока 7 определения ошибки соответствующего канала 2, 3, где формируются сигналы рассогласования с измеренными значениями датчиков крена и дифферента. Далее блоки 8 ПИД регуляторов формируют сигналы управляющих воздействий на приводы опорной платформы, обеспечивающие удержание горизонтального положения антенны.
Таким образом, устройство автономно, без получения команд из центрального пульта управления РЛС, с высокой точностью отрабатывает показания датчика углового положения MB антенны и датчиков углового положения опорной платформы, аппроксимирует угловое положение БВ антенны, передаваемое в центральный пульт управления РЛС, и обеспечивает заданный режим работы антенного поста.
Одновременно с этим через блок 15 управления и ввода-вывода происходит выдача данных о положении приводов в центральный пульт управления РЛС и считывание команд управления и информационных данных, поступающих из пульта.
В случае получения команды об изменении режима работы привода (скорость, направление по азимуту, ширина сектора сканирования) блок 15 формирует сигналы изменения динамики работы устройства, по которым блок 10 начальных установок изменяет настройку генератора 11 и блоков канала 1 отработки показаний датчика МВА. Блок 8 ПИД регулятора выдает откорректированные сигналы ошибки со знаком, пропорциональным рассогласованию задатчика и истинного положения антенны, которые через блок 9 формирования выходных сигналов передаются на исполнительный механизм для сведения сигнала ошибки к нулю. Таким образом, обеспечиваются режимы сканирования в различных секторах с различными скоростями и режимы вращения с поддержанием заданной скорости, а также режим установки в заданное положение. Одновременно с этим обеспечивается независимая стабилизация антенного устройства по крену и дифференту.
Промышленная применимость изобретения определяется тем, что на основе приведенного описания и чертежа устройство может быть изготовлено по известной технологии при использовании известных комплектующих изделий и использовано для управления приводами, использующими датчики углового положения и двигатели различного типа.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления опорно-поворотными устройствами антенной установки | 2024 |
|
RU2822869C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ В МНОГОЛУЧЕВЫХ РЛС | 1993 |
|
RU2084915C1 |
| ИМИТАТОР УГЛА ПОВОРОТА АНТЕННЫ РЛС | 1987 |
|
SU1841003A1 |
| Система управления приводами антенны станции наведения | 2022 |
|
RU2794200C1 |
| Устройство для программного управления положением объекта | 1987 |
|
SU1520479A1 |
| СИНХРОННО-СИНФАЗНЫЙ ЭЛЕКТРОПРИВОД | 2010 |
|
RU2422978C1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО ПОИСКА КАНАЛОВ РАДИОСВЯЗИ | 2014 |
|
RU2563145C1 |
| Преобразователь угловых перемещений в код | 1985 |
|
SU1311024A1 |
| ТАНКОВЫЙ БАЛЛИСТИЧЕСКИЙ ВЫЧИСЛИТЕЛЬ | 1987 |
|
RU2226715C2 |
| Цифровой функциональный преобразователь | 1982 |
|
SU1104492A1 |
Использование: изобретение относится к универсальным автоматизированным системам управления приводами, преимущественно приводом азимутального вращения антенны со стабилизацией опорной платформы антенного поста корабельной радиолокационной станции. Сущность: в устройство управления приводами, содержащее канал отработки показаний датчика углового положения медленно вращающейся антенны (МВА), включающий последовательно соединенные блок определения ошибки, блок пропорционально-интегрально-дифференциального (ПИД) регулятора и блок формирования выходных сигналов управления двигателем, дополнительно введены генератор сетки частот, блок начальных установок, к первому и второму выходам которого подключены соответственно вход генератора сетки частот и вход блока аппроксимации углового положения быстро вращающейся антенны (БВА), выход которого соединен с первым входом блока управления и ввода-вывода, второй вход которого соединен с выходом блока автоматического выбора навигационного канала, а выход по сигналу заданного углового положения антенны соединен со вторым входом блока определения ошибки, кроме этого, в канал отработки показаний датчика углового положения МВА введены блок возбуждения датчика угла и последовательно соединенные блок входных цепей, блок преобразователя фаза-амплитуда и блок преобразователя амплитуда-код, выход которого соединен с первым входом блока определения ошибки, при этом блок входных цепей выполнен с возможностью аналого-цифрового преобразования как напряжений, так и токовых сигналов в зависимости от типа датчика углового положения антенны, подключаемого ко входу блока входных цепей, а блок преобразователя фаза-амплитуда выполнен с возможностью как преобразования фазы выходных сигналов блока входных цепей, так и непосредственной трансляции их на входы блока преобразователя амплитуда-код, входы начальной установки блока входных цепей, и блока преобразователя фаза-амплитуда соединены с третьим выходом блока начальных установок, к первому выходу генератора сетки частот подключены тактовые входы блока возбуждения датчика угла и блока входных цепей, ко второму выходу подключен тактовый вход блока преобразователя амплитуда-код, к третьему и четвертому выходам подключены соответствующие тактовые входы блока аппроксимации углового положения БВА, а к пятому выходу - тактовый вход блока автоматического выбора навигационного канала, выход блока преобразователя амплитуда-код, на котором формируется код текущего углового положения МВА, соединен также с третьим входом блока управления и ввода-вывода, четвертый вход-выход которого предназначен для подключения канала связи с пультом управления радиолокационной станции. Технический результат: повышение надежности, точности регулировки скорости вращения и остановки антенны в заданный угол с обеспечением стабилизации опорной платформы по крену и дифференту. 1 з.п. ф-лы, 1 ил.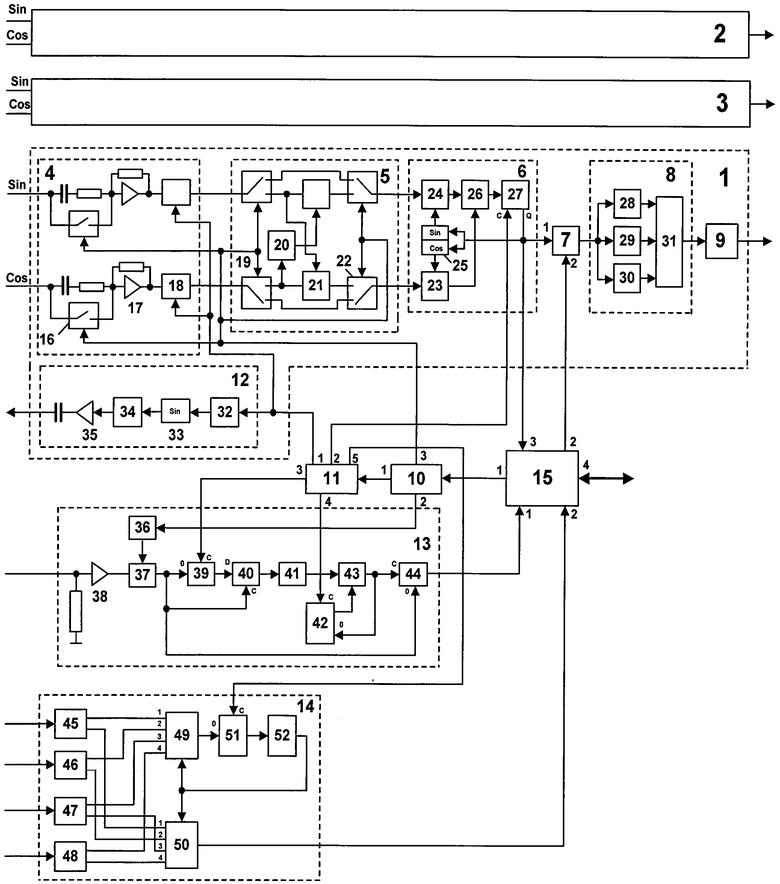
1. Устройство управления приводами, содержащее канал отработки показаний датчика углового положения медленно вращающейся антенны (МВА), включающий последовательно соединенные блок определения ошибки, блок пропорционально-интегрально-дифференциального (ПИД) регулятора и блок формирования выходных сигналов управления двигателем, отличающееся тем, что в него введен блок начальных установок, вход которого соединен с первым выходом блока управлении и ввода-вывода, а первый и второй выходы соединены соответственно с входом генератора сетки частот и входом блока аппроксимации углового положения быстро вращающейся антенны (БВА), выход которого соединен с первым входом блока управления и ввода-вывода, второй вход которого соединен с выходом блока автоматического выбора навигационного канала, а второй выход по сигналу заданного углового положения антенны соединен со вторым входом блока определения ошибки, кроме этого в канал отработки показаний датчика углового положения МВА введены блок возбуждения датчика угла и последовательно соединенные блок входных цепей, блок преобразователя фаза-амплитуда и блок преобразователя амплитуда-код, выход которого соединен с первым входом блока определения ошибки, при этом блок входных цепей выполнен с возможностью аналого-цифрового преобразования как напряжений, так и токовых сигналов в зависимости от типа датчика углового положения антенны, подключаемого ко входу блока входных цепей, а блок преобразователя фаза-амплитуда выполнен с возможностью как преобразования фазы выходных сигналов блока входных цепей, так и непосредственной трансляции их на входы блока преобразователя амплитуда-код, входы начальной установки блока входных цепей, и блока преобразователя фаза-амплитуда соединены с третьим выходом блока начальных установок, к первому выходу генератора сетки частот подключены тактовые входы блока возбуждения датчика угла и блока входных цепей, ко второму выходу подключен тактовый вход блока преобразователя амплитуда-код, к третьему и четвертому выходам подключены соответствующие тактовые входы блока аппроксимации углового положения БВА, а к пятому - тактовый вход блока автоматического выбора навигационного канала, выход блока преобразователя амплитуда-код, на котором формируется код текущего углового положения МВА, соединен также с третьим входом блока управления и ввода-вывода, четвертый вход-выход которого предназначен для подключения канала связи с пультом управления радиолокационной станции.
2. Устройство управления приводами по п. 1, отличающееся тем, что дополнительно содержит каналы отработки показаний датчика крена и датчика дифферента опорной платформы, выполненные аналогично каналу отработки показаний датчика углового положения МВА.
| УСТРОЙСТВО УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ | 2007 |
|
RU2351972C2 |
| СПОСОБ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ПОЛОЖЕНИЯ ПРИВОДА | 2004 |
|
RU2271030C2 |
| Следящий электропривод наведенияМЕХАНичЕСКОй СиСТЕМы | 1979 |
|
SU809053A2 |
| ЦИФРОВАЯ АВТОМАТИЧЕСКАЯ СИСТЕМА КОМБИНИРОВАННОГО РЕГУЛИРОВАНИЯ | 2000 |
|
RU2183848C2 |
| WO1997016774 A1, 09.05.1997. | |||

