Известны универсальные автокомпенсационные мосты для измерения емкости и тангенса угла потерь. Мосты такого типа содержат образцовую меру емкости, фазовращатель, трансформатор напряжения с двумя плечевыми и одной вспомогательной обмотками, детектор равновесия, два управляемых им электронных элемента, квадратурный детектор и два отсчетиых вольтметра.
Недостатком известной схемы является то, что нестабильность квадратурного детектора непосредственно входит в погрешность измерения емкости (индуктивности). Предлагаемый автокомпенсационный мост позволяет повысить точность измерения емкости и получить отсчет проводимости утечки.
Описываемый мост содержит два дополнительных узла - третий электронный управляемый элемент и третий вольтметр. Первый управляемый элемент подключен рабочим входом к выходу фазоврандателя, а входом управляющего воздействия - к одному из выходов детекторов равновесия. Рабочий вход второго управляемого элемента соединен с выходом первого, рабочий вход третьего управляемого элемента - со второй плечевой обмоткой трансформатора. Входы управляющих воздействий второго и третьего управляемых элементов соединены параллельно и подключены ко второму выходу детектора равновесия. Выходы второго и третьего управляемых элементов, к каждому из которых присоединен параллельно отсчетный прибор, включены последовательно с образцовым (контролируемым) сопротивлением.
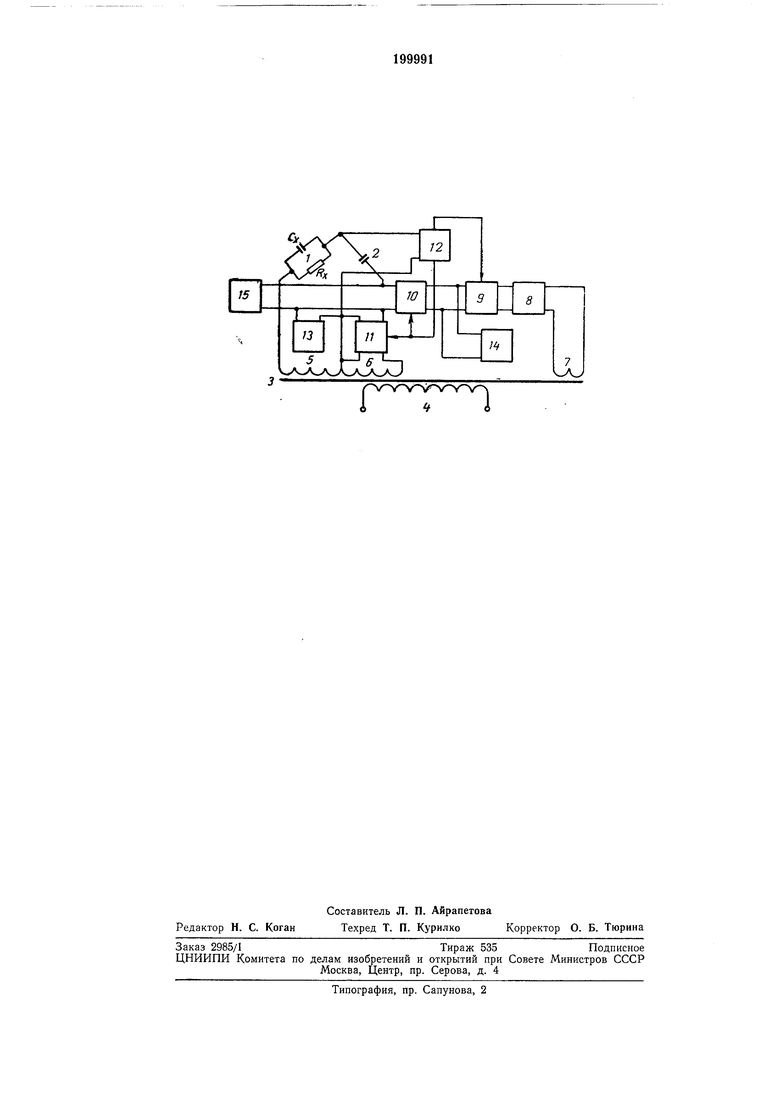
Электрическая схема универсального моста для случая, когда контролируемый двухполюсник носит емкостной характер, показана на чертеже.
Контролируемый двухполюсник 1 представлен конденсатором С и сопротивлением . Мост содержит образцовый конденсатор 2 с емкостью Сд, прецизионный трансформатор 3 напряжения с первичной обмоткой 4, двумя
плечевыми обмотками 5 и 6 и третьей вспомогательной - 7. Обмотка 7 включена на вход фазовращателя 8, служащего для поворота вектора напряжения на угол я/2. Выход фазовращателя соединен с рабочим входом первого
управляемого элемента 9, предназначенного для уравновешивания моста но тангенсу угла потерь. Выход этого управляемого элемента подключен к рабочему входу второго управляемого элемента 10, с помощью которого мост
уравновешивается по величине проводимости утечки. Рабочий вход третьего управляемого элемента 11 подключен к плечевой обмотке 6. Выходы управляемых элементов 10 и 11 включены последовательно с образцовым конден3вательно с контролируемым двухполюсником L Вход детектора 12 равновесия подключен к измерительной диагонали моста. Один из выходов детектора равновесия присоединен к управляющему входу элемента 9, а второй вы-5 ход детектора - к управляющим входам элементов 10 и //. Вольтметр 13, по шкале которого отсчитывается ел1кость, включен па выход управляемого элемента 11. Вольтметр 14, предназначепный для отсчета тангенса угла10 потерь, присоединен к выходу управляемого элемента 9, а вольтметр 15, служащий для отсчета проводимости утечки, - к выходу управляемого элемента 10. Управляемые элементы 9, 10 и // представ-15 ляют собой электронные устройства, предназначенные для изменения напряжения, поступающего на рабочий вход, в зависимости от величины сигнала на управляющем входе. Фаза выходного напряжения должна оставаться20 равной фазе напряжения на рабочем входе и коэффициент передачи не должен зависеть от напряжения на рабочем входе. Схема работает следующим образом. Напряжение неравновесия моста поступает25 на детектор 12 равновесия, где по известным принципам формируются два управляющих воздействия. Одно из этих воздействий управляет коэффициентом передачи элемента 9, а другое - коэффициентом передачи элементов30 10 и 11. Управление идет в таком направлеНИИ, чтобы уменьшить напряжение неравновесия моста до величины, близкой к нулю. После достижения состояния равновесия выходные папряжения элементов Я 10 и // имеют ко-35 нечные значения, измерение которых с помощью соответствующих вольтметров позволяет произвести отсчет параметров контролируемого двухполюсника. Устройство обеспечивает раздельный отсчет емкости Cjf, тангенса угла потерь tg б и проводимости утечки g контролируемого конденсатора. Обозначим напряжение питания трапсформатора через U, напряжения, изме-45 ряемые вольтметрами 13, 14, 15, - через Не, Uigo, Ug; коэффициент передачи фазовращателя 8 - через Ki и регулируемые коэффициенты передачи элементов 9, 10 и 11 - соответствеппо /Сз, Кз и К. Из уравнения равнове-50 сия моста следует, что и ° п - и .f55 WCo 40 4 ; U - -U- . tg S WKaK. ..„, ,„, ,„. W, W, и W, числа витков обмоток 4, 5 и 6. Как видно из этих формул результат измереиия емкости не зависит от параметров фазовращателя и управляемых элементов, а результат измерения тангенса угла потерь связан с величиной отношения Если характеристики управления элементов 3 и 4 идентичны, то , поскольку на оба элемента подается один и тот же сигнал управления. В этом случае результат измерения тангенса угла потерь не зависит от величины /Сз и К. Последнее весьма важно, так как дает возможность использовать в качестве управляемых элементов цепи с нелинейными управляемыми полупроводниковыми приборами, Таким образом, в данном мосте может быть обеспечена сравнительно высокая точность измерения емкости и проводимости утечки, а таклсе ироведено измерение тангенса угла потерь с несколько меньшей точностью. Все еказанное справедливо при измерении индуктивности, добротности и активного сопротивления двухполюсника по последовательной схеме замещения. В этом случае необходимо поменять местами образцовый и контролируемый элементы, ., ,. Предмет изобретения Автокомпенсационный мост переменного тока для измерения комплексных сопротивлений, содержащий образцовую меру емкости (индуктивности), трансформатор напряжения с двумя плечевыми обмотками, фазовращатель, детектор равновесия, два управляемых электронных равновешивающих элемента и два отсчетных прибора, отличающийся тем, что, с целью повышеиия точности измерения емкости (индуктивности) и получения отсчета проводимости утечки, мост снабжен третьим управляемым уравновешивающим элементом и третьим отсчетным прибором, рабочий вход второго управляемого элемента соединен с выходом первого, рабочик вход третьего управляемого элемента - со второй плечевой обмоткой трансфоматора, входы управляющих воздействий второго и третьего управляемых элементов соединены параллельно и подключены ко второму выходу детектора равновесия, выходы второго и третьего управляемых элементов, к каждому из которых присоединен параллельно отсчет1Ь1Й нрибор, включены последовательно с образцовым (контролируемым) сопротивлением.
/2
15
ч.A.
1
7 .AJ