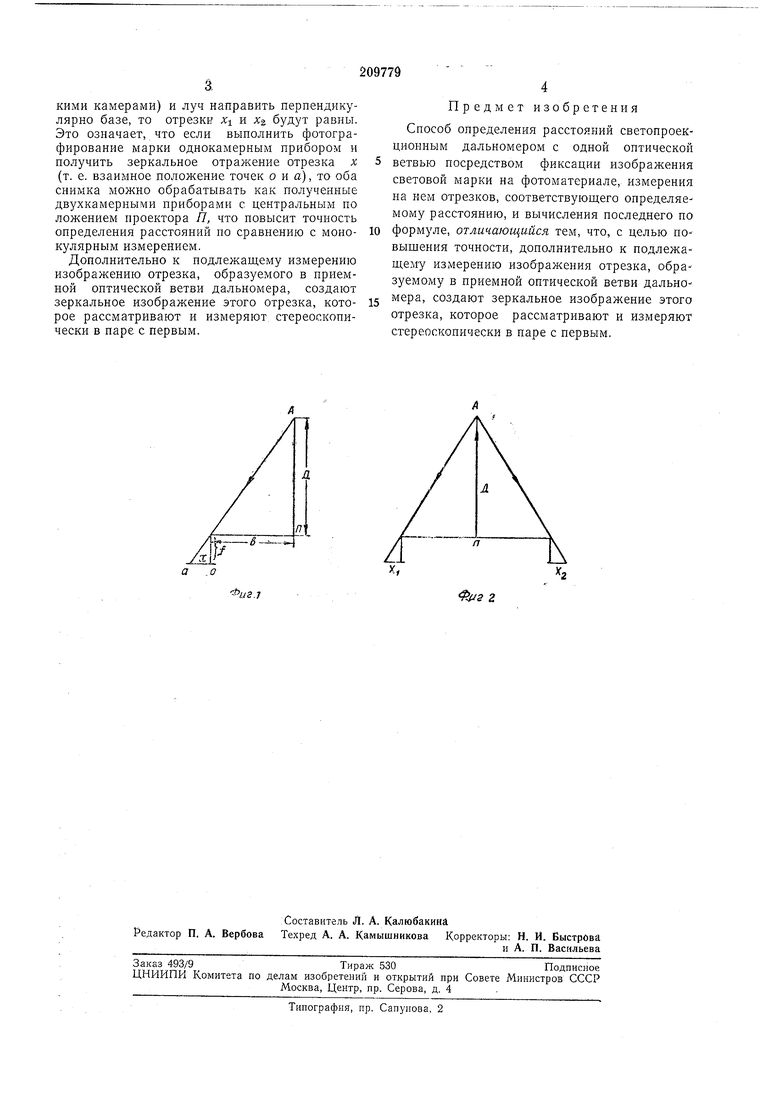
Известны способы определения расстояний с помощью светопроекционных дальномеров, по которым фиксируют изображение световой марки на фотоматериале, измеряют на нем отрезок, соответствующий определяемому расстоянию, и вычисляют величину расстояния по формуле П- / / - - - , uiOX где б - база прибора, / - фокусное расстояние фотокамеры, (. - измеренный отрезок (см. фиг. 1). В случае использования проекционно-визуальных дальномеров применяют ту же схему определения расстояний, только изображение светового пятна не фиксируют, а отрезок х, измеряют непосредственно в процессе наблюдения пятна. В этих случаях погрешность определения расстояния равна:dD dx bf В светодальномерах с двумя оптическими ветвями, где марка Л (световое пятно) фиксируется двумя фотокамерами, исходное расстояние определяется по формуле: /04 де р Xi + х-2, - параллакс точки а (см. иг. 2), измеряемый с помощью стереофоторамметрического прибора, например, стереокомпаратора. Погрешность определения расстояния этим дальномером составляет: ,(4) где dp - погрешность измерения параллакса. Из формулы (2) и (4) следует, что ошибка определения расстояний прямо пропорциональна ошибке измерения х или р и обратно пропорциональна базе Ь. Точность стереоскопического измерения указанных величин (при использовании светопроекционного фотодальномера с двумя оптическими ветвями) выше, чем при использовании светодальномера с одной ветвью и измерениях, проводимых монокулярно. Предлагаемый способ позволяет повысить точность определения расстояний светопроекционными дальномерами с одной оптической ветвью. Для этого отрезок, определяющий искомое расстояние, измеряют стереоскопически. Сущность способа определяется из следующего предположения. Если проектор светового луча (фиг. 2) расположить строго в середине между камерами (в случае производства измерений светодальномером с двумя оптическими камерами) и луч направить перпендикулярно базе, то отрезкр х и Xz будут равны. Это означает, что если выполнить фотографирование марки однокамерным прибором и получить зеркальное отражение отрезка х (т. е. взаимное положение точек она), то оба снимка можно обрабатывать как полученные двухкамерными приборами с центральным по ложением проектора П, что повысит точность определения расстояний по сравнению с монокулярным измерением. Дополнительно к подлежащему измерению изображению отрезка, образуемого в приемной оптической ветви дальномера, создают зеркальное изображение этого отрезка, которое рассматривают и измеряют стереоскопически в паре с первым. Предмет изобретения Способ определения расстояний светопроекционным дальномером с одной оптической ветвью посредством фиксации изображения световой марки на фотоматериале, измерения на нем отрезков, соответствующего определяемому расстоянию, и вычисления последнего по формуле, отличающийся тем, что, с целью повыщения точности, дополнительно к подлежащему измерению изображения отрезка, образуемому в приемной оптической ветви дальномера, создают зеркальное изображение этого отрезка, которое рассматривают и измеряют стереоскопически в паре с первым.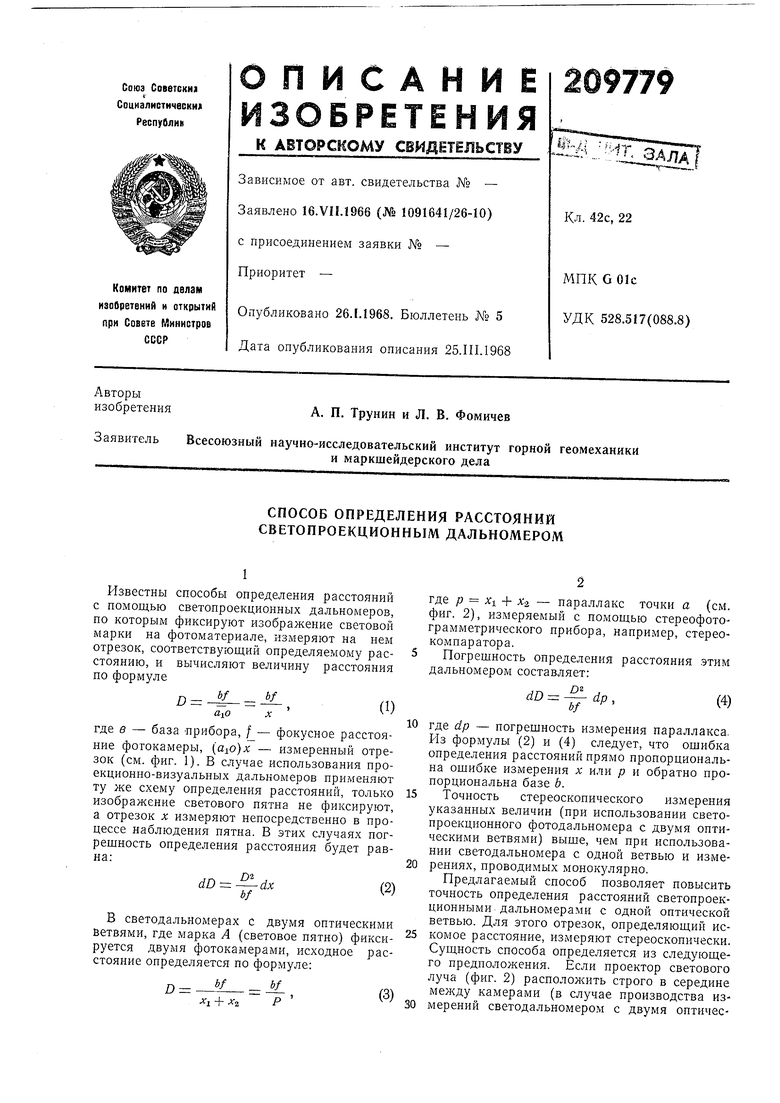
| название | год | авторы | номер документа |
|---|---|---|---|
| Светопроекционный дальномер | 1983 |
|
SU1080013A1 |
| СВЕТОПРОЕКЦИОННЫЙ ФОТОДАЛЬНОМЕР | 1964 |
|
SU164964A1 |
| Светопроекционный дальномер | 1983 |
|
SU1093892A1 |
| Дальномер | 1983 |
|
SU1117446A1 |
| Способ определения пространственных координат точек местности | 1985 |
|
SU1278580A1 |
| ПРИЦЕЛ НА ВНУТРЕННЕЙ БАЗЕ | 2016 |
|
RU2638625C2 |
| ПРОЕКЦИОННЫЙ ДАЛЬНОМЕР | 1971 |
|
SU300758A1 |
| ОПТИЧЕСКАЯ СИСТЕМА ЭЛЕКТРОННО-ОПТИЧЕСКОГО ТАХЕОМЕТРА | 1994 |
|
RU2097694C1 |
| БЕСКОНТАКТНЫЙ ИЗМЕРИТЕЛЬ РАССТОЯНИЙ | 1996 |
|
RU2124700C1 |
| Способ получения стереоскопических снимков с синтезированной величиной стереобазы | 2019 |
|
RU2703611C1 |
