Изобретение относится к фотограмметрии, а именно к способам определения пространственных координат заданных точек местности, и может быть использовано при крупномасштабном картографирова- НИИ городов, а также для решения различных инженерно-топографических задач.
Цель изобретения - повышение производительности труда, достигаемое за счет сокращения объема подготовительных и вычислительных работ.
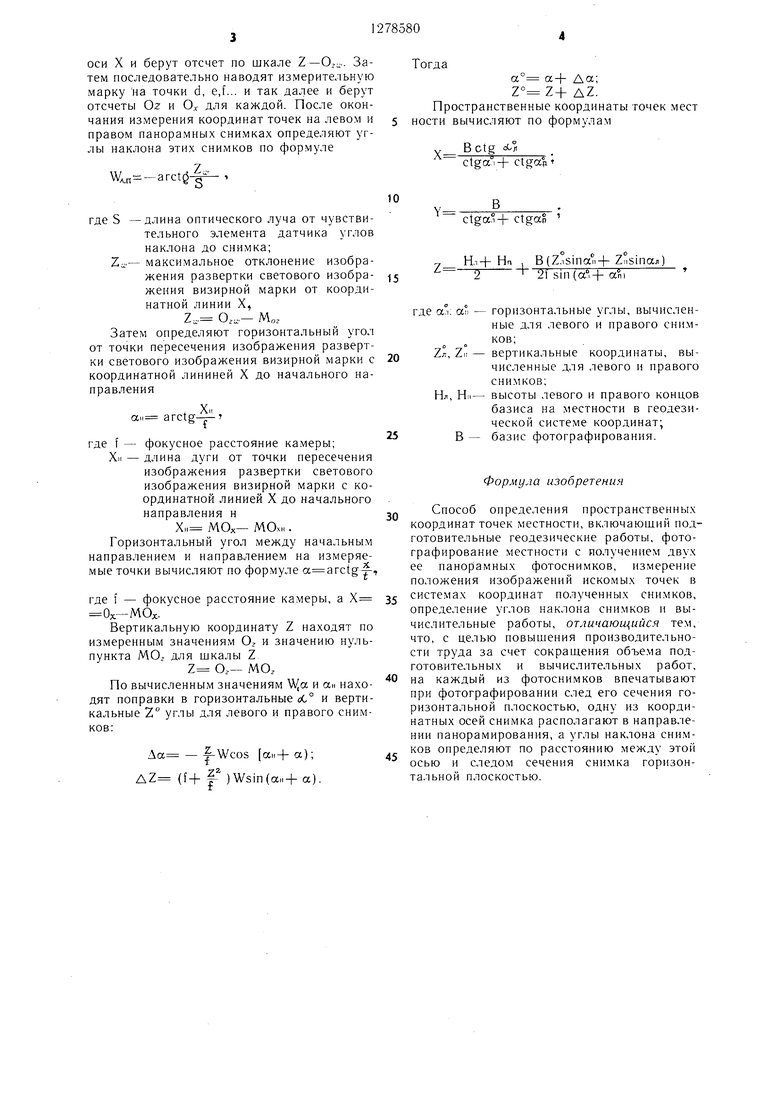
На фиг. 1 изображена принципиальная схема панорамной фотокамеры для осу- пдествления способа; на фиг. 2 - принципиальная схема датчика углов наклона сним
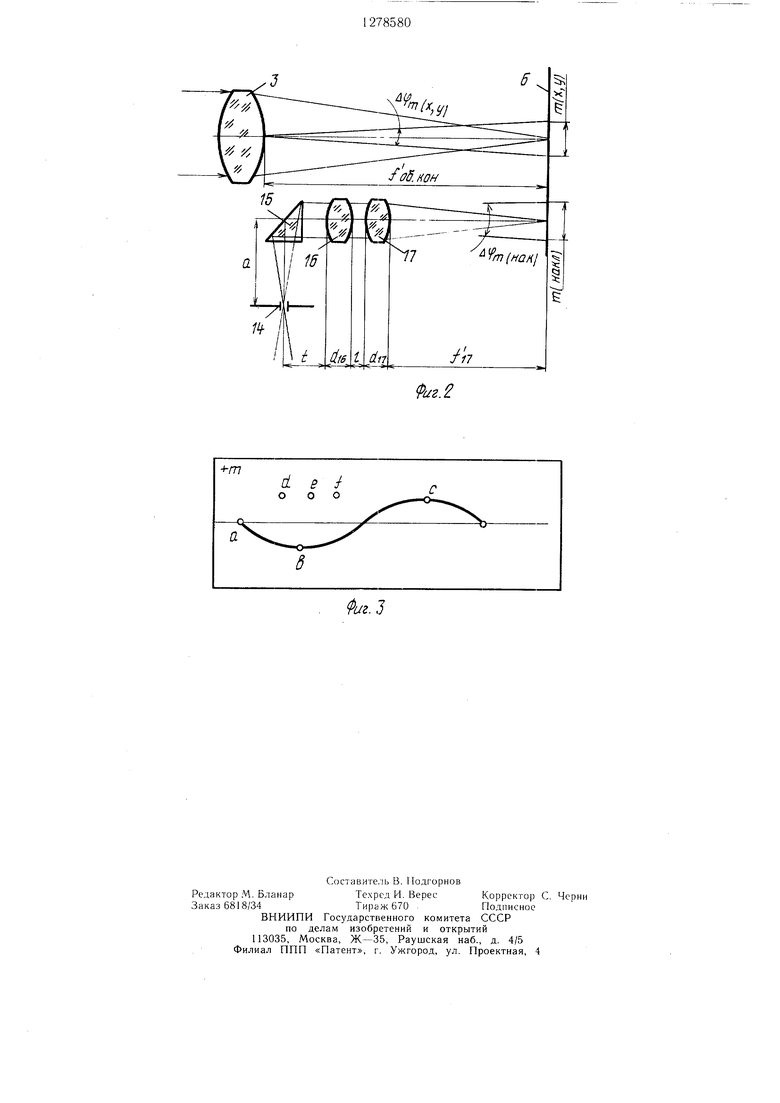
ков; на фиг. 3 - цилиндрический панорам пый снимок, общий вид.
Устройство для получения панорамных снимков представляет собой фотокамеру (фиг. 1), содержащую корпус 1, неподвижное основание 2, объектив 3, экспозицион- ную щель, образованную ножами 4 и 5,.ленто- протяжный механизм, датчик углов наклона. Лентопротяжный механизм служит для транспортирования фотопленки 6 и состоит из подающей 7, приемной 8 катушек, трап- снорт;ирующего барабана 9, направляющих роликов 10 и II.
Датчик углов наклона позволяет задать положение горизонтальной плоскости и состоит из источника 12 света, конденсора 13, визирной марки 14, пря.моугольной приз- мы 15 и объективов 16 и 17. Источник 12 света и конденсор 13 расположены во- внутренней полости осевой системы 18 фотокамеры И позволяют равномерно и максимально подсветить визирную марку, которая вместе с прямоугольной призмой 15 закреплена в подвесе 19 так, что ось визирной марки 14 в статическом положении с максимально допустимой погрешностью установки соосна с осью внутренней поверхности осевой системы фотокамеры. Подвес 19 закреплен на корпусе 1 фотокамеры с возможностью углового поворота относительно оси У.
Величина углового смещения визирной марки 14 с подвесом 19 относительно оси У обусловлена конструкцией подвеса 19 и максимально допустимой величиной угла наклона камеры относительно истинной вертикали, находится в пределах 2.
Объективы 16 и 17 служат для получения в плоскости фотопленки 6 изображения визирной марки 14. Световые диаметры объективов 16 и 17 и прямоугольной призмы 15 выбраны в пределах ГО- 15 мм, т.е. так,что при максимальном угловом смещении (2) подвеса 19 с визирной маркой 14 и пря.моугольной призмой 15 не происходит срезание светового пучка и пропадание изоб- ражения визирной марки 14 на фотопленке 6. Объективы 16 и 17 имеют параллельный ход лучей.
j
5
0
р 5 0
0 5
Способ определения пространственных координат точек местности осуществляют следующим образом.
Панорамную фотокамеру устанавливают на концах базиса известной длины и производят фотографирование круговой панорамы местности. При протягивании фотопленки с,подающей 7 на приемную 8 катушку и через направляющие ролики 10 и 1 1 и транспортирующий барабан 9 позади экспозиционной щели с ножами 4 и 5 с помощью объектива 3 строится на фотопленке 6 изображение местности. Световой поток от источника 12 света, распространяющийся вдоль оси Z и формирующий изображение визирной марки 14, при помощи копденсо- ра 13 освещает визирную марку 14, падает на зеркальную грань прямоугольной призмы 15 и отражается ею вдоль оси X на объективы 16 и 17. Изображение визирной марки 14 переносится объективом 17 на фотопленку 6, где фиксируется след сечения цилиндрического снимка горизонтальной плоскостью, являющийся синусоидальной разверткой светового изображения визирной .марки 14. В случае наклона ка.меры относительно истинной вертикали, обусловленного погрешностью выверки уровня и влиянием внешних условий (ветер, вибрация основания, на котором установлен инструмент и т.д.), и изображение визирной марки 14 из пря.мой линии трансформируется в синусоидальную развертку (фиг. 3), по которой определяют углы наклона.
Затем измеряют панорамные снимки. Измерения выполняют в монокулярном режиме, так как цилиндрические снимки, в отличие от плоских, и.меют большую величину разномасштабности и поэтому стереоскопическое их наблюдение невозможно. Перед измерением панора.мные снимки закладывают в кассеты стереокомпаратора так, что зона левого снимка с изображением противоположного конца базиса располагается с правой стороны левой кассеты, а соответствующая зона правого снимка - с левой стороны правой кассеты.
Измерение панорамного спи.мка выполняют путем наведения измерительной марки стереокомпаратора на точку нача.пьного направления т, в качестве которого принимают изображение противоположного конца базиса (фиг. 3) и берут отсчет, который принимают за нуль - пункт МОл для шкалы X. Затем измерительную марку наводят на точку а - пересечения изображения развертки светового изображения визирной марки с координатной линией X и берут отсчет по шкалам прибора X и Z - МОхн и МО;, которые считают нуль-пунктом соответствующих шкал, после чего из.мери- тельную .марку наводят на ближайшую точку в - максима или с - мини.мума отклонения изображения развертки светового изображения визирной марки от координатной
оси X и берут отсчет по шкале Z-0,.. Затем последовательно наводят измерительную марку па точки d, e,f... и так далее и берут отсчеты Oz и О для каждой. После окончания измерения координат точек па левом и правом панорамных снимках определяют углы паклона этих снимков по формуле
Z .
%.п -arctc
где S -длина оптического луча от чувствительного элемента датчика углов наклона до снимка;
Z.- максимальное отклонение изображения развертки светового изобра- жения визирной марки от координатной линии X,
Z, О,.,- М„,
Затем определяют горизонтальный угол от точки пересечения изображения развертки светового изображения визирной марки с координатной лининей X до начального направления
а„ arctg- T
где f - фокусное расстояние камеры;
Хн - длина дуги от точки пересечения изображения развертки светового изображения визирной марки с координатной линией X до начального направления н
Хи МОх- МОхн.
Горизонтальный угол между начальным направлением и направлением на измеряемые точки вычисляют по формуле a arctgy
где 1 - фокусное расстояние камеры, а Х Ох--МОх.
Вертикальную координату Z находят по измеренным значениям О, и значению нуль- пункта МО; для шкалы Z
Z О.-- МО,
По вычисленным значениям и ан находят поправки в горизонтальные оС° и вертикальные 2 углы для левого и правого снимков:
Да - Wcos оси+а); AZ (f+ f-)Wsin(aH+a).
Тогда
сс° а-}- Да;
Z° Z+ AZ.
Пространственные координаты точек мест ности вычисляют по формулам
л, В Ctg сСя
ctgcc°-|- ctgaji
10
Y
В
ctga°-j- ctgan
Нл-|- Нч B(Z.isina i-|-- Znsinqji;
- 2 2f sin(a l+ ссп)
где а.к осч - горизонтальные углы, вычисленные для левого и правого снимков;
Zл, Zi. - вертикальные координаты, вычисленные для левого и правого снимков;
Нл, HI.- высоты левого и правого концов базиса на местности в геодезической системе координат; В - базис фотографирования.
0
5
5
Формула изобретения
Способ определения пространственных координат точек местности, включаюший подготовительные геодезические работы, фотографирование местности с получением двух ее панорамных фотоснимков, измерение положения изображений искомых точек в системах координат полученных снимков, определение углов наклона снимков и вычислительные работы, отличающийся тем, что, с целью повышения производительности труда за счет сокращения объема подготовительных и вычислительных работ, на каждый из фотоснимков впечатывают при фотографировании след его сечения горизонтальной плоскостью, одну из координатных осей снимка располагают в направлении панорамирования, а углы наклона снимков определяют по расстоянию между этой осью и следом сечения снимка горизонтальной плоскостью.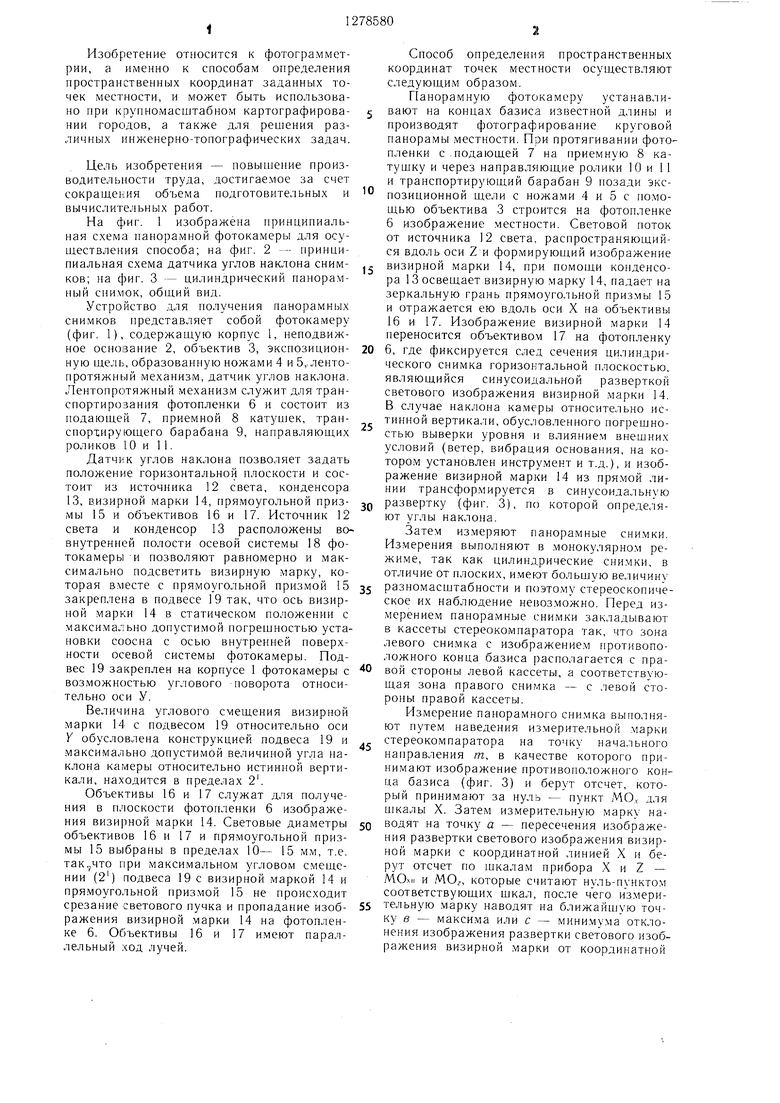
| название | год | авторы | номер документа |
|---|---|---|---|
| Стереоскопическая фотокамера | 1959 |
|
SU142869A1 |
| Устройство для панорамной стереоскопической съемки | 1983 |
|
SU1183937A1 |
| Способ наземной фотограмметрической съемки | 1977 |
|
SU777425A1 |
| Монокомпаратор | 1982 |
|
SU1057783A1 |
| СПОСОБ МАСШТАБИРОВАНИЯ СНИМКОВ ФОТОПЛАНИМЕТРИЧЕСКОЙ СЪЕМКИ ГОРИЗОНТАЛЬНЫХ ГОРНЫХ ВЫРАБОТОК | 2020 |
|
RU2791080C2 |
| Способ мониторинга дорожного полотна автомобильных дорог | 2021 |
|
RU2762538C1 |
| Способ стереорентгенограмметрической съемки | 1990 |
|
SU1747032A1 |
| Способ фототеодолитной крупномасштабной съемки подземных выработок | 1977 |
|
SU673845A1 |
| ПРИБОР ДЛЯ ПОСЛЕДОВАТЕЛЬНОГО ОРИЕНТИРОВАНИЯ АЭРОСНИМКОВ | 1926 |
|
SU7898A1 |
| Способ определения планового положения точек объекта и устройство для его осуществления | 1981 |
|
SU979852A1 |
Изобретение относится к фотограмметрии и нозволяет иовысить производительность труда за счет сокращения объема нод- готовительных и вычислительны.х работ. Панорамной фотокамерой, установленной на концах базиса известной длины, фотографируют круговух) панораму местности на пленке 6. Световой ноток источника 12 через конденсор 13 освенхает визирную марку 14 И с иомои1ью прямоуго,пьной иризмы 15и объективов 16 и 17 формирует ее изображение на фотопленке (5, где фиксируется след сечения цилиндрического снимка горизонтальной плоскостью. При измерении панорамного снимка располагают одну из его координатных осей в ианравлении панорамирования и наводят измерительную марку на точк максимума и.чи минимума отклонения изображения развертки светового изображения визирной марки от координатной оси X. Углы наклона снимков он- реде, 1яют по расстоянию между этоп осью и следом сечения снимка горизонтальной плоскостью. 3 ил. (Л ю 00 СП оо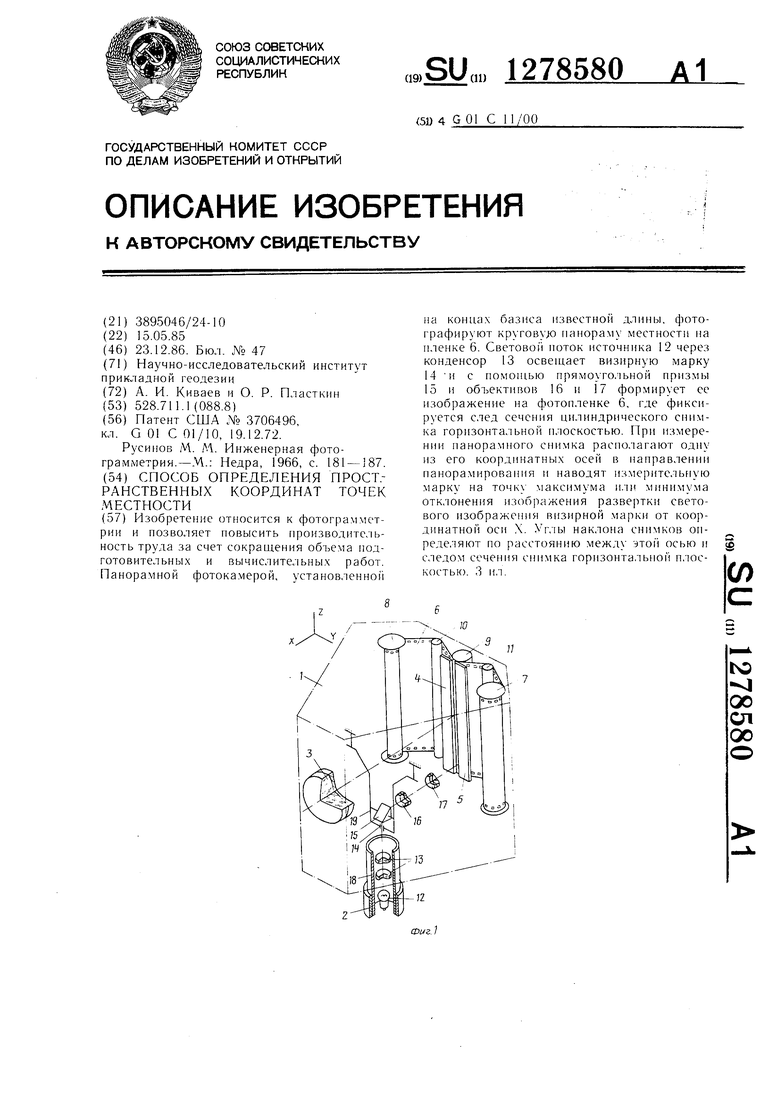
| Патент США .Nb 3706496, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Русинов М | |||
| М | |||
| Инженерная фотограмметрия.-М.: Недра, 1966, с | |||
| Водяные лыжи | 1919 |
|
SU181A1 |
