Известны вертикальные гравитационные градиентометры, представляющие собой вакуумированный корпус с размещенными в нем массами, усияитель, регистратор. Для измерения вертикального градиента используется относительная скорость движения масс, разнесенных по высоте при их свободном падении.
Предложенный градиентометр отличается от известных тем, что в нем корпус снабжен верхней и нижней направляющими. Верхняя направляющая кинематически связана с пусковым устройством, а нижняя - с подъемнььм механизмом и гидравлическим демпфером. С внутренней стороны корпуса имеется два кольцевых выступа-упора различного диаметра. Одна масса выполнена в виде магнитной системы, а другая - в виде катушки с проводом, жестко связанной с отнесенной вниз по вертикали основной массой и подсоединенной через дифференцирующее устройство к регистратору.
Пусковое устройство вынолнено из упругой пружины, установленной между кронштейном подставки и корпусом, и концевого выключателя, связанного с верхней направляющей корпуса и через реле .с источником запирающего напряжения. В качестве подъемного механизма применен кулачок, вращаемый Электродвигателем через редуктор. Такое выполнейие градиентометра позволило повысить точность измерений.
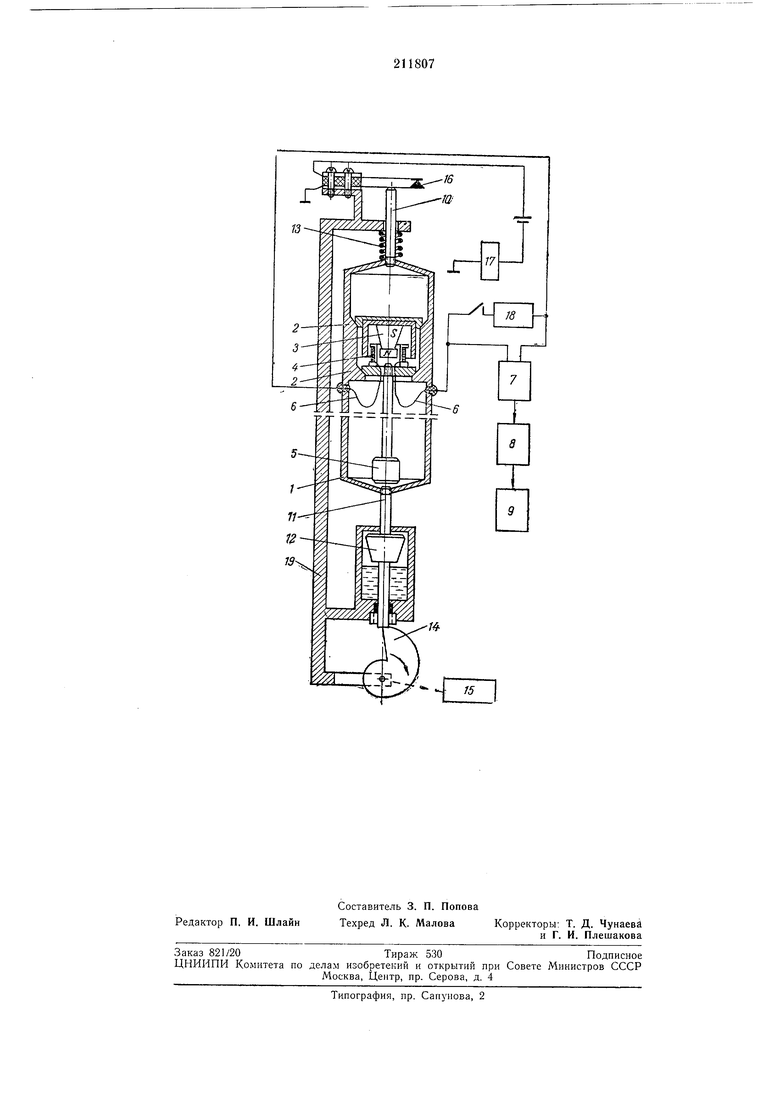
На чертеже схематически представлен предложенный градиентометр в разрезе.
Градиентометр состоит из вакуумированного .корпуса /, внутренняя нолость которого выполнена с двумя кольцеобразными выступами-упорами 2, масс 3 ТА 4, свободно лежащих на упорах 2. Масса 3 представляет собой
магнитную систему, масса 4 - катушку с проводом, жестко соединенную с основной массой 5. Выход катушки массы 4 проводниками 5 соединен с входом усилителя 7, дифференцирующим устройством 8 и регистратором
9. Корпус 1 имеет направляющие /6 и У/ и связан гидравлическим демпфером 12, пружиной 13 и подъелшым механизмом 14 с приводом 15. Направляющая 10 связана с концевым выключателедМ 16, включенным в цепь
питания реле П. Контакт реле включен в цепь источника запирающего .напряжения 18. Элементы устройства располагаются на подставке /Р. Устройство работает следующим образом.
Корпус / с направляющими 10 -fi. 11 перемещается в вертикальном направлении вверх относительно подставки 19 с помощью подъемного механизма 14, вращаемого приводом 15, например электродвигателем, через редуктор,
поворота кулачка подъемного механизма корпус под действием упругой силы пружины с ускорением, в несколько раз превышающим ускорение свободного падения, движется вниз, лишая массы 3 и 4 опоры, вследствие чего они свободно падают. Это дозволяет получить незначительную разницу во времени между моментами отпускания верхней и нижней масс. Гидравлический демпфер 12 смягчает удар корпуса в конце движения. Измерения можно производить периодически, при непрерывном вращении кулачка подъемного механизма и изменять период измерения, изменяя скорость вращения кулачка. Корпус 1 перед .измерением должен приводиться в вертикальное положение, например, установкой подставки 19 по уровню. При выполнении этого условия тела при свободном падении будут двигаться по вертикали, действие горизонтальной составляющей силы тяжести не окажется. Кроме того, чувствительность датчика, состоящего нь магнитной системы и катушки, по скорости в вертикальном направлении значительно больше, чем в горизонтальном направлении.
Поэтому будем рассматривать лишь изменение скорости падающих масс в вертикальном направлении, так как центры тяжести масс 3 и 4 разнесены по высоте, их скорости свободного падения будут различны, и это вызовет появление в катушке массы 4 электродвижущей силы индукции, пропорциональной вертикальному градиенту ускорения силы тяжести.
В конце падения тел, при ударе их о корпус, выходное напряжение датчика вследствие большой скорости массы 4, относительно массы 3 может перегрузить усилитель. Для предупреждения перегрузок вход усилителя 7
подключается к источнику запирающего напряжения 18 контактами реле 17, замедленного на отпускание, через промежуток времени от момента отпускания тел, но меньший времени их движения. До отпускания тел реле 17 находится под током и контакт его замкнут. При движении корпуса вниз концевой выключатель 16 размыкает цепь питания реле.
Предмет изобретения
1.Вертикальный гравитационный градиентометр, содержащий вакуумированный корпус с размещенными в нем массами, усилитель, регистратор, подставку, отличающийся тем, что, с целью повышения точности измерений, в нем корпус снабжен верхней и нижней направляющими, кинематически связанными: лервая - с пусковым устройством, вторая - с подъемным механизмом и гидравлическим демпфером, а с внутренней стороны имеет два кольцевых выступа-упора различных диаметров; массы выполнены одна в виде магнитной системы, другая в виде ;катушки с проводом, жестко связанной с отнесенной вниз но вертикали основной массой и подсоединенной через дифференцирующее устройство К регистратору.
2.Градиентометр по п. 1, отличающийся тем, что пусковое устройство выполнено в виде упругой пружины, установленной между кронщтейном подставки и корпусом, и концевого выключателя, связанного с верхней направляющей корпуса и через реле с источни.ком запирающего напрян ения.
3.Градиентометр по п. 1, отличающийся тем, что .подъемный меха.низм выполнен в виде кулачка, вращаемого электродвигателем через редуктор.
| название | год | авторы | номер документа |
|---|---|---|---|
| Вертикальный градиентометр | 1988 |
|
SU1836644A3 |
| ИЗМЕРИТЕЛЬ ВЕРТИКАЛЬНОГО ГРАДИЕНТА И УСКОРЕНИЯ СИЛЫ ТЯЖЕСТИ | 1990 |
|
RU2037163C1 |
| МОТОЦИКЛ С АВТОМАТИЧЕСКИМ ОПОРНЫМ КОЛЕСНЫМ УСТРОЙСТВОМ | 2016 |
|
RU2666063C1 |
| Гравитационный вертикальный градиентометр | 1991 |
|
SU1838804A3 |
| МОТОЦИКЛ С ВЫДВИЖНОЙ УСТАНОВКОЙ СО СНАБЖЕННЫМИ ЛЕЗВИЯМИ ЛЫЖАМИ | 2016 |
|
RU2666062C1 |
| ИСТОЧНИК СЕЙСМИЧЕСКИХ СИГНАЛОВ УДАРНОГО ТИПА | 2002 |
|
RU2246740C2 |
| ВЕРТИКАЛЬНЫЙ ГРАВИТАЦИОННЫЙ ГРАДИЕНТОМЕТР | 2004 |
|
RU2292065C2 |
| МНОГОХОДОВОЙ МЕХАНИЗМ С АВТОМАТИЧЕСКИМ ОТВЕДЕНИЕМ В КОНЦЕ ХОДА | 2006 |
|
RU2419392C2 |
| ПЕРЕДАТОЧНОЕ УСТРОЙСТВО И ПРЕДНАЗНАЧЕННАЯ ДЛЯ НЕГО ПРИВОДНАЯ СИСТЕМА ДЛЯ МНОГОПОЗИЦИОННЫХ ПРЕССОВ С АВТОМАТИЧЕСКОЙ ПЕРЕДАЧЕЙ ОБРАБАТЫВАЕМЫХ ЗАГОТОВОК С ОДНОЙ ПОЗИЦИИ НА ДРУГУЮ | 1988 |
|
RU2020073C1 |
| ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ СО СХЕМОЙ УПРАВЛЕНИЯ ПИТАНИЕМ | 2011 |
|
RU2586310C2 |