Изобретение относится к передаточному устройству и предназначенной для него системы для многопозиционных прессов с автоматической передачей обрабатываемых заготовок с одной позиции на другую.
Известно передаточное устройство многопозиционных прессов с автоматический передачей обрабатываемых заготовок с одной позиции на другую, содержащее симметрично смонтированные на основании по обе стороны линии прессов продольные направляющие элементы, установленные на продольно-направляющих элементах с возможностью возвратно-поступательного перемещения и кинематически связанные между собой тележки, расстояние между которыми равно расстоянию между соседними штампами, опоры, закрепленные на каждой тележке с возможностью их вертикального перемещения, держатели заготовок, сопряженные с двумя опорами [1].
Также известна приводная система для передаточного устройства многопозиционных прессов с автоматической передачей обрабатываемых заготовок с одной позиции на другую, содержащая размещенные в корпусе механизмы для вертикального перемещения поперечин с захватными органами в виде кулачкового вала, установленного в корпусе, подъемного кулачка, смонтированного на указанном, шарнирной оси, подъемного рычага, закрепленного на шарнирной оси с возможностью взаимодействия с подъемным кулачком и кинематически связанного с узлом подъема захватных органов передаточного устройства и для горизонтального перемещения приводной системы в виде приводной тяги, один конец которой жестко закреплен на кожухе передаточного устройства, приводного кулачка, приводного двухплечего рычага, верхний конец которого связан с горизонтальной осью и со свободным концом приводной тяги, а другой конец - с приводным кулачком [2].
Данные технические решения, предназначенные для многопозиционных прессов с автоматической передачей обрабатываемых заготовок с одной позиции на другую, вызывает различные технические проблемы из-за громоздкости и тяжеловесности механизмов: необходимость большой силы, невозможность увеличения скорости поточной линии для повышения производительности, что вызвало бы вибрацию устройства.
Цель изобретения заключается в том, чтобы сделать подъемные составные части передаточного устройства компактными по размерам и легкими по весу, чтобы тем самым уменьшить движущую силу, предотвратить вибрацию (колебания) и сделать приводную систему для передаточного устройства простой по конструкции.
Передаточное устройство многопозиционного пресса с автоматической передачей обрабатываемых заготовок с одной позиции на другую, содержащее симметрично смонтированные на основании по обе стороны линии прессов продольные направляющие элементы, установленные на продольных направляющих элементах возвратно-поступательного перемещения и кинематически связанные между собой тележки, расстояние между которыми равно расстоянию между соседними штампами, опоры, закрепленные на каждой тележке с возможностью их вертикального перемещения, держатели заготовок, сопряженные с двумя опорами, снабжено дополнительными тележками, опорами и парой продольных направляющих, смонтированных на основании параллельно указанным направляющим и симметрично относительно продольной оси линии, при этом дополнительные опоры размещены на дополнительных тележках, а последние установлены на дополнительных направляющих с возможностью независимого перемещения относительно основных тележек, причем держатели сопряжены с соответствующими опорами посредством поперечин, концы которых смонтированы на верхних частях соответствующих опор, а держатели для заготовок жестко закреплены на поперечине.
Кроме того, устройство снабжено для регулирования вертикального перемещения продольных направляющих элементов, смонтированных на соответствующей паре направляющих.
Приводная система снабжена механизмами сведения поперечин подъемным коромыслом, смонтированным на горизонтальной оси, подъемной тягой, кинематически связывающей один конец подъемного коромысла с подъемным рычагом, дополнительной подъемной тягой, один конец которой закреплен на втором конце подъемного коромысла, а другой связан с узлом подъема поперечины, а механизм сведения поперечин выполнен в виде копирного кулачка, смонтированного на кулачковом валу, дополнительного рычага, закрепленного на шарнирной оси с возможностью взаимодействия с копирным кулачком, приводного коромысла, размещенного на горизонтальной оси, дополнительной тяги, кинематически связывающей приводное коромысло с дополнительным рычагом, при этом подъемная тяга установлена параллельно линии, проходящей через оси симметрии шарнирной и горизонтальной осей в месте соединения этих осей с подъемным коромыслом и подъемным рычагом, а расстояния между указанными точками равно длине подъемной тяги.
Приводная система дополнительно содержит регулирующее расстояние коромысло, установленное с возможностью поворота вокруг горизонтальной оси, регулирующий расстояние рычаг, смонтированный на шарнирной оси с возможностью поворота посредством регулирующего кулачка и регулирующую расстояние тягу, соединяющую регулирующий расстояние рычаг с регулирующим расстояние коромыслом, установленную параллельно линии, соединяющей шарнирную ось с горизонтальной и имеющую равную ей длину.
На фиг.1 изображено передаточное устройство для многопозиционных прессов с автоматической передачей обрабатываемых заготовок с одной позиции на другую; на фиг.2 - вид, используемый для пояснения способа работы передаточного устройства, показанного на фиг.1; на фиг.3 - приводная система передаточного устройства, вид сбоку; на фиг.4 - предлагаемый вариант передаточного устройства, план; на фиг.5 - то же, вид сбоку; на фиг.6 - тележка; на фиг. 7 - то же, вид спереди; на фиг.8 - предлагаемое передаточное приводное устройство, вид сбоку; на фиг.9 - то же, пространственное изображение приводного механизма; на фиг.10 - первая модификация первого варианта осуществления изобретения, вид сбоку; на фиг.11 - то же, вид спереди; на фиг.12 - вторая модификация первого варианта осуществления изобретения, вид сбоку; на фиг.13 - третья модификация первого варианта осуществления изобретения, вид сбоку; на фиг.14 - четвертая модификация первого варианта осуществления настоящего изобретения, вид сбоку; на фиг.15 - второй вариант предлагаемого передаточного устройства, план; на фиг.16 - то же, вид сбоку; на фиг.17 - вид сбоку передаточного приводного механизма, используемого во втором варианте, показанном на фиг.15; на фиг.18 - третий вариант предлагаемого передаточного устройства, план; на фиг.19 - то же, вид сбоку; на фиг.20 - тележка для третьего варианта осуществления изобретения, вид сбоку; на фиг.21 - перспективный вид в увеличенном масштабе поперечины тележки, показанной на фиг. 18; на фиг.22 - третий вариант осуществления изобретения, план; на фиг. 23 - четвертый вариант передаточного устройства в соответствии с изобретением, вид сбоку; на фиг. 24 - тележка, используемая в четвертом варианте; на фиг.25 - то же, вид спереди; на фиг.26 - приводной механизм в четвертом варианте, показанном на фиг.23; на фиг.27 - первая модификация четвертого варианта осуществления изобретения, вид сбоку; на фиг.28 - то же, вид спереди; на фиг.29 - вторая модификация четвертого варианта осуществления изобретения, вид сбоку; на фиг.30 - тележка, используемая во второй модификации, вид спереди; на фиг.31 - третья модификация четвертого варианта осуществления изобретения, вид сбоку; на фиг.32 - тележка, используемая в третьей модификации, вид спереди; на фиг.33 - пятый вариант осуществления изобретения, вид сбоку; на фиг.34 - то же, план; на фиг.35 - гидравлическая схема, используемая в пятом варианте; на фиг.36 - первая модификация пятого варианта осуществления изобретения, план; на фиг.37 - то же, вид сбоку; на фиг. 38 - вторая модификация пятого варианта осуществления изобретения, план; на фиг.39 - то же, вид сбоку.
На чертежах обозначены: 1,2 - рама, 3,4 - подвижные опоры, 5,6 - опорные элементы, 7,8 - поперечины, 9 - вакуумные присоски, 10 - заготовки, 11 - горизонтальная зубчатая рейка, 12 - шестерня, 13 - вертикальная зубчатая рейка, 14 - соединительная тяга, 15 - каретка, 16 - вертикальный паз, 17 - ось, 18 - ролик, 19 - кулачок, 20 - подающий рычаг, 21 - кулачковая поверхность, 22 - реверсирующая кулачковая поверхность, 23 - наклонная в направлении вверх кулачковая поверхность, 24 - обращенная вверх кулачковая поверхность, 25 - наклонная в направлении вверх кулачковая поверхность, 26 - вторая реверсирующая поверхность, 27 - кулачковая пластина, 28 - ось, 29 - ролик, 30 - цилиндр, 32 - криволинейный паз, 32 - штанга, 33 - рычаг, 34 - зубчатая рейка, 35 - шестерня, 36 - зубчатая рейка, 37 - цилиндр, 38, 39 - штампы, 40, 41 - направляющие, 42 - тележка, 43 - соединительные штанги, 44 - передаточная штанга, 45 - подъемная штанга, 46 - зубчатая рейка, 47, 48 - шестерни, 49, 50 - вертикальные зубчатые рейки, 51 - направляющая плита, 52 - штанга, 53 - зубчатая рейка, 54 - шестерня, 55 - зубчатая рейка, 56, 57 - опорные элементы, 58, 59 - вертикальные стержни, 60 - поперечины, 61 - вакуумные присоски, 62 - заготовки, 63 - ось, 64 - передаточный рычаг, 65 - следящий элемент, 66 - кулачковый вал, 67 - кулачок, 68, 69 - рычаги, 70 - следящие элементы (ролики), 71, 72 - кулачки, 73 - кулачковый вал, 74 - горизонтальная ось, 75, 76 - коромысла, 77 - подъемная тяга, 78 - тяга, 79, 80, 81 - соединительные тяги, 82, 83, 84 - каретки, 85, 86 - ось, 87 - электродвигатель, 88 - вал, 89 - шестерни, 90, 91 - зубчатые рейки, 92, 93 - продолговатые пазы, 94, 95 - пальцы, 96 - цилиндры, 97 - пантограф, 98 - соединительное звено, 99 - раздвижной элемент, 100 - направляющая, 101 - зубчатая передача, 102, 103 - шестерни, 104 - зубчатый сектор, 105 - подштамповая плита, 106 - ролики, 107, 108 - цилиндры, 109 - поддерживающий элемент, 110 - зубчатая рейка, 111 - шестерня, 112 - вал, 113 - подшипник, 114 - шестерня, 115 - несущее средство для заготовок, 116 - палец, 117 - разжимно-сжимной кулачок, 118 - следящий ролик, 119 - разжимно-сжимной рычаг, 120 - L-образный рычаг, 121 - тяга, 122 - зубчатый сектор, 123 - тяга, 124 - шестерня, 125 - шестерня, 126 - цилиндр, 127, 128, 129 - зубчатые рейки, 130, 131, 132 - шестерни, 133, 134, 135 - электродвигатели, 136 - колонны, 137 - направляющие элементы, 138 - направляющие детали, 139, 140 - цилиндры, 141, 142 - поршни, 143, 144 - напорные камеры, 145, 146 - напорные камеры, 147, 148 - части цилиндры, 149 - шток, 150 - синхронизирующий цилиндр, 151, 152 - трубопроводы, 153 - трубопровод, 154 - клапан, 155 - обратный клапан, 156 - трубопровод, 157 - насос, 158 - бак, 159 - электродвигатель, 160 - зубчатые передачи, 161 - домкрат, 162 - шестерни, 163 - зубчатые рейки.
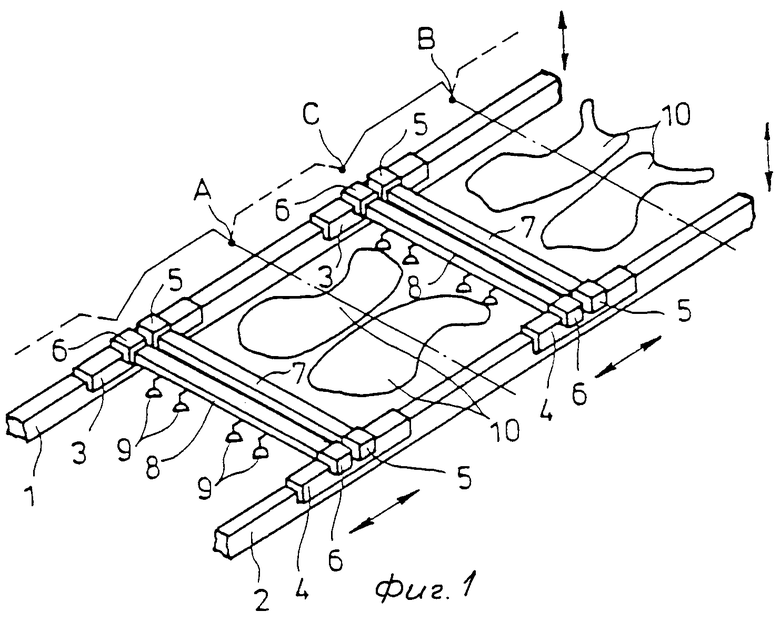
В передаточном устройстве с обеих сторон ряда штампов установлены две подвижные в вертикальном направлении рамы 1 и 2 (для краткости называемые далее в этом описании как "подъемные рамы"), проходящее в направлении поточной линии обработки параллельно друг другу. На подъемных рамах установлено множество подвижных опор 3 и 4, которые могут быть перемещены в направлении линии обработки и соединены друг с другом таким образом, что расстояние между соседними парами подвижных опор 3 и равно расстоянию между соседними штампами (или позициям обработки), причем подвижные опоры 3 и 4 кинематически связаны с приводной системой (не показана), обеспечивающей их возвратно-поступательное движение в направлении поточной линии обработки.
На двух подвижных опорах 3 и 4 установлены два опорных элемента 5 и 6 с возможностью возвратно-поступательного движения друг к другу или друг от друга в направлении линии обработки, а к этим опорным элементам, расположенным напротив друг друга, прикреплены поперечины 7 и 8 соответственно. На поперечинах установлено несколько вакуумных присосок 9, которые могут присасывать к себе с возможностью отпускания заготовку из листового материала. Позицией 10 обозначены штампованные обрабатываемые заготовки.
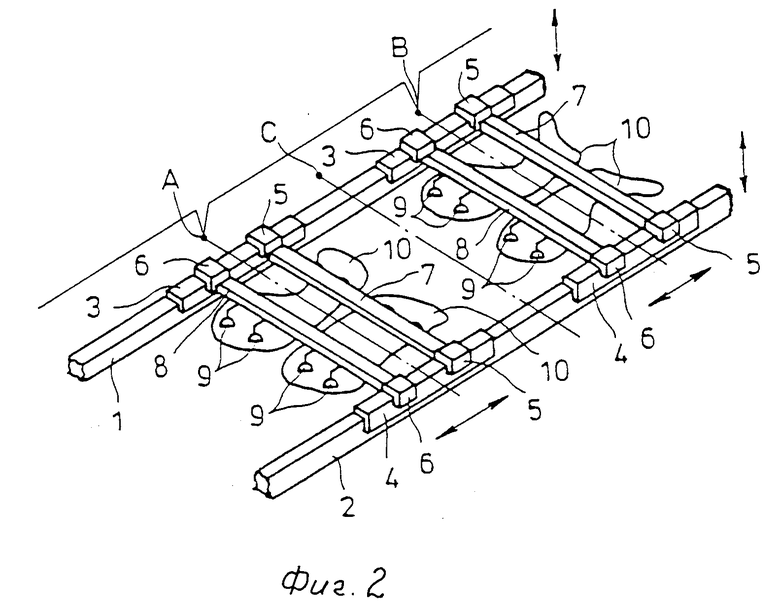
При использовании передаточного устройства после того, как заготовки 10 уже отштампованы на расположенной выше по потоку позиции А, подъемные рамы 1 и 2 перемещают вверх, при этом поперечины 7 и 8, находившиеся в отведенном положении вблизи промежуточной позиции С, перемещают в направлении друг от друга, а подвижные опоры 3 и 4 - на позицию А.
После этого подъемные рамы 1 и 2 перемещают вниз для опускания поперечин 7 и 8 в направлении к находящимся на позиции А заготовкам 10 и приводят в действие вакуумные присоски 9, чтобы захватить заготовки 10, входящие в соприкосновение с поперечинами 7 и 8. Затем подъемные рамы 1 и 2 перемещают вверх, а подвижные опоры 3 и 4 - в направлении потока для передачи заготовок 10 на позицию В, расположенную ниже по потоку. Потом подъемные рамы 1 и 2 опускают и выключают вакуумные присоски 9, в результате чего обрабатываемые заготовки 10 опускаются и ложатся на позицию В, После этого подъемные рамы 1 и 2 опять поднимают, при этом поперечины 7 и 8 заставляют перемещаться в направлении друг к другу, а подвижные опоры 3 и 4 перемещают обратно в промежуточное положение С. Затем подъемные рамы опускают, отводя поперечины 7 и 8 назад, и дополнительно штампуют обрабатываемые изделия 10 на расположенной ниже по потоку позиции В.
В ответ на периодические действия подъемных рам 1 и 2, подвижных опор 3 и 4 и опорных элементов 5 и 6 заставляют поперечины 7 и 8 перемещаться по вертикали, передавать обрабатываемые заготовки 10 с одной позиции на другую и перемещаться в направлении друг к другу или друг от друга, в результате чего обеспечивается последовательный перенос всех заготовок 10 в направлении потока и автоматическая штамповка их на многочисленных позициях обработки.
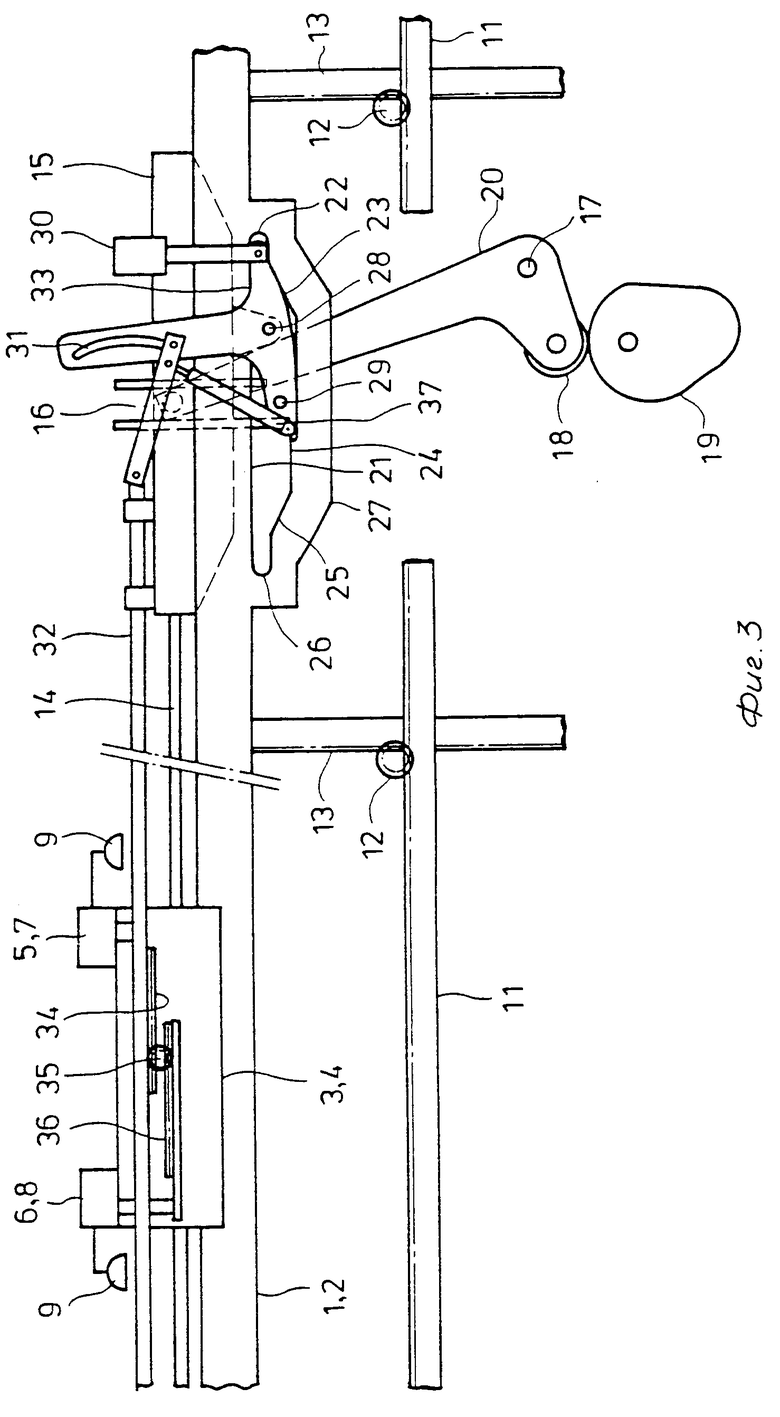
Передаточное устройство содержит (фиг.3) первый приводной механизм для перемещения в вертикальном направлении подъемных рам 1 и 2, второй приводной механизм для возвратно-поступательного перемещения подвижных опор 3 и 4 в направлении поточной линии обработки и третий приводной механизм для возвратно-поступательного перемещения опорных элементов 5 и 6 синхронно с перемещением подвижных опор, а также перемещения их в направлении друг к другу или друг от друга по подвижным опорам. Следовательно, приводимая система для приведения в движение передаточного устройства содержит первый, второй и третий приводные механизмы. В частности, первый приводной механизм для перемещения в вертикальном направлении подъемных рам 1 и 2 содержит горизонтальную зубчатую рейку 11, кинематически связанную с источником энергии (не показан) для обеспечения ее горизонтального перемещения, шестерню 12, находящуюся в зацеплении с горизонтальной зубчатой рейкой, и вертикальную зубчатую рейку 13, находящуюся в зацеплении с шестерней 12, причем верхний ее конец прикреплен к подъемной раме 1 или 2, благодаря чему подъемные рамы могут быть перемещены в вертикальном направлении через посредство шестерни 12 и вертикальной зубчатой рейки 13 путем горизонтального перемещения зубчатой рейки 11.
Второй приводной механизм для приведения в действие подвижных опор 3 и 4 содержит расположенную на одном конце подъемных рам 1 и 2, соединенную с подвижными опорами 3 и 4 посредством соединительной тяги 14 каретку 15, выполненную с возможностью возвратно-поступательного движения в направлении линии обработки, и подающий рычаг 20, верхняя часть которого выполнена с возможностью скольжения по вертикали в вертикальном пазу 16, выполненном в каретке 15, и который установлен с возможностью качания на оси 17 и несет на нижнем конце работающий по кулачку ролик 18, находящийся в контакте с подающим кулачком 19, в результате чего при приведении во вращение подающего кулачка 19 подающий рычаг 20 поворачивается вокруг оси 17. При этом его верхняя часть скользит по пазу 16. Качательное движение подающего рычага 20 преобразуется в перемещение каретки 15 в направлении поточной линии обработки, благодаря чему могут быть приведены в движение подвижные опоры 3 и 4.
Третий приводной механизм для приведения в движение опорных элементов 5 и 6 по подвижным опорам 3 и 4 в направлении линии обработки и перемещения тем самым поперечин 7 и 8 в направлении друг к другу или друг от друга содержит кулачковую пластину 27, неподвижно прикрепленную к подъемным рамам 1 и 2 и имеющую паз с образующими замкнутую криволинейную петлю поверхностями включающими обращенную кулачковую поверхность 21, реверсирующую кулачковую поверхность 22, наклоненную в направлении вверх кулачковую поверхность 23, обращенную вверх кулачковую поверхность 24, наклоненную в направлении вверх кулачковую поверхность 25 и вторую реверсирующую поверхность 26, выполненный в форме перевернутой буквы Т рычаг 33, который шарнирно прикреплен в средней точке между его нижними концами к каретке 15 посредством оси 28, имеет на одном нижнем конце работающий по кулачку (следящий) ролик 29, находящийся в контакте качения с кулачковыми поверхностями (21-26), и цилиндр 30 смещения на другом нижнем конце для прижатия следящего ролика 29 к кулачковым поверхностям 21-26 и соединен с толкающе-тянущей штангой 32, один конец которой входит с возможностью скольжения в криволинейный паз 31, выполненный на верхнем конце, причем упомянутые толкающе-тянущие штанги 32 проходят сквозь подвижные опоры 3 и 4 с возможностью возвратно-поступательного движения в направлении поточной линии обработки и приложения тем самым движущей силы к опорным элементам 5 и 6 через посредством зубчатой рейки 34, шестерни 35 и горизонтальной зубчатой рейки 36, в результате чего качательное движение в направлении линии обработки рычага 33 совместно с кареткой 15 преобразуется в перемещение толкающе-тянущих штанг 32 в направлении линии обработки, что вызывает перемещение опорных элементов 5 и 6 по подвижным опорам 3 и 4, перемещаемым в направлении проточной линии обработки, в направлении друг к другу или друг от друга, вследствие чего поперечины 7 и 8 тоже оказываются вынужденными перемещаться в направлении друг к другу или друг от друга.
Цилиндр 37 изменяет смещение толкающе-тянущей штанги 32 при изменении положения точки шарнирного соединения штанги 32 и рычагом 33 для обеспечения возможности качания рычага 33.
Первый вариант.
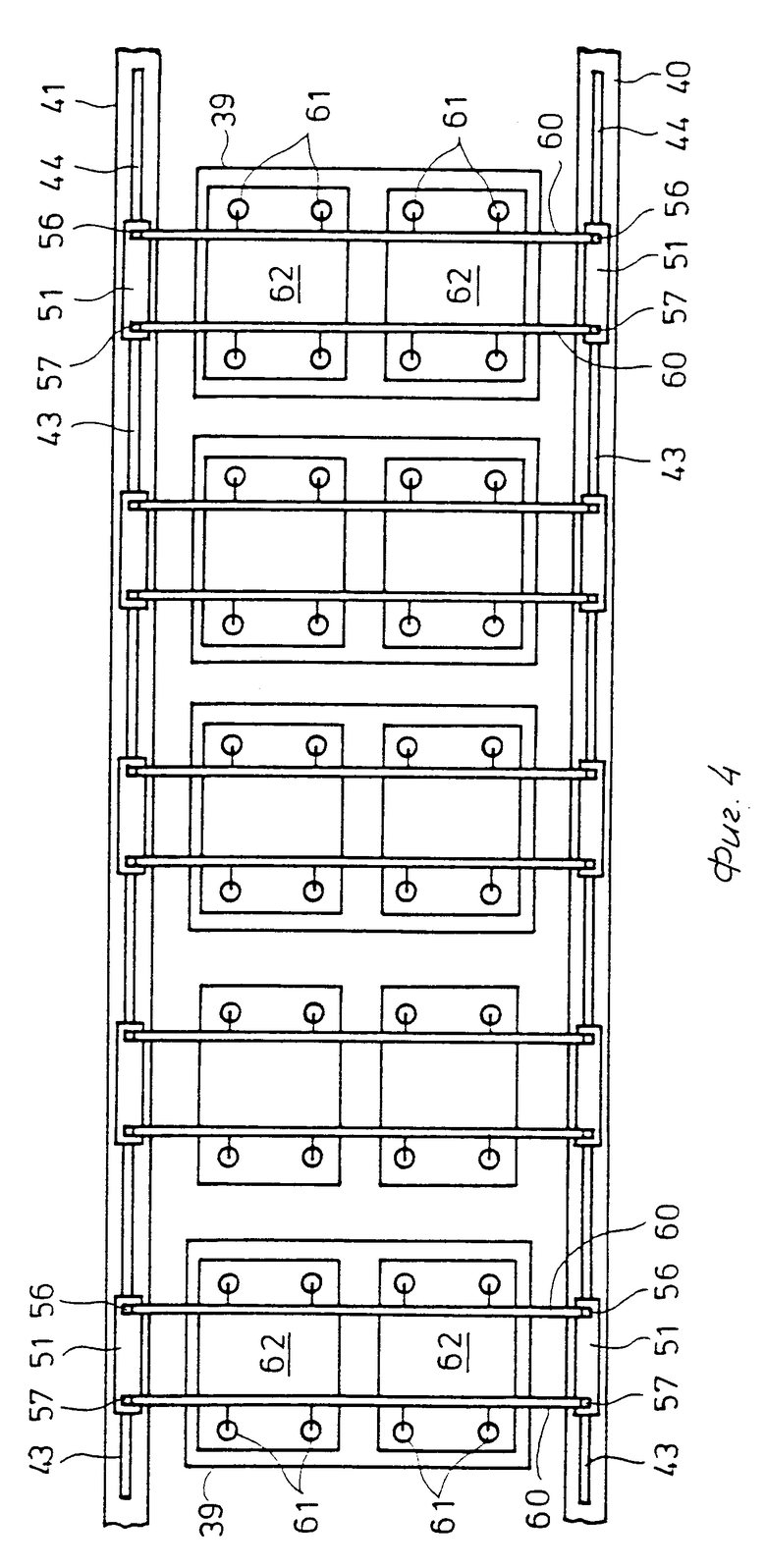
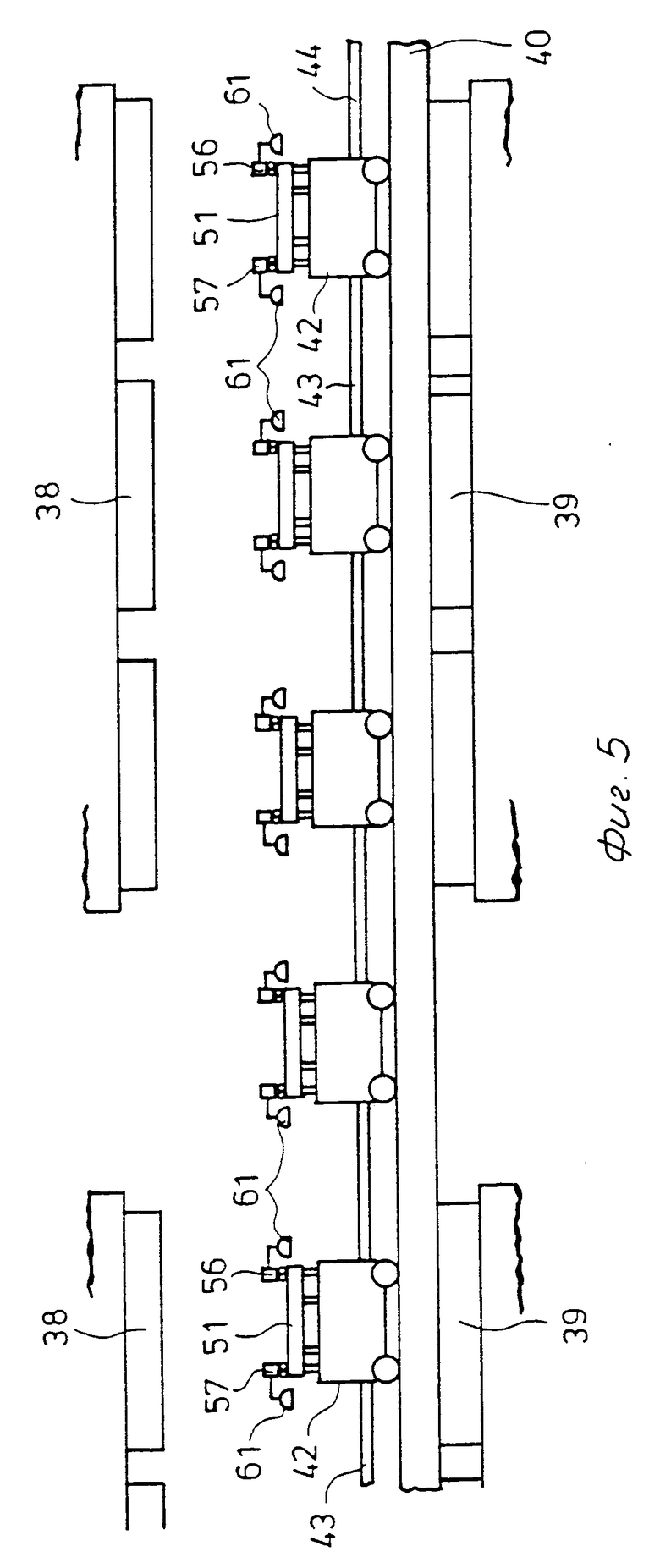
На фиг. 4-9 описан первый вариант осуществления изобретения, Множество комплексов, состоящих из верхнего и нижнего штампов 38 и 39, распределено с некоторым между ними промежутком в направлении поточной линии обработки, и с той и другой стороны поточной линии проходят две параллельные направляющие 40 и 41. На каждой направляющей 40(41) установлено множество тележек 42, которые подвижны в направлении поточной линии и соединены друг с другом посредством соединительных штанг 43 таким образом, что расстояние между соседними тележками 42 равно расстоянию между расположенным выше и ниже по потоку соседними комплектами штампов 38 и 39.
Расположенная выше или ниже всех по потоку крайняя тележка 42 соединена посредством передаточной штанги 44 с передаточной приводной системой, таким образом, что в ответ на возвратно-поступательное движение передаточной штанги 44 в направлении поточной линии обработки все связаны друг с другом тележки 42 будут одновременно совершать возвратно-поступательное движение в направлении поточной линии.
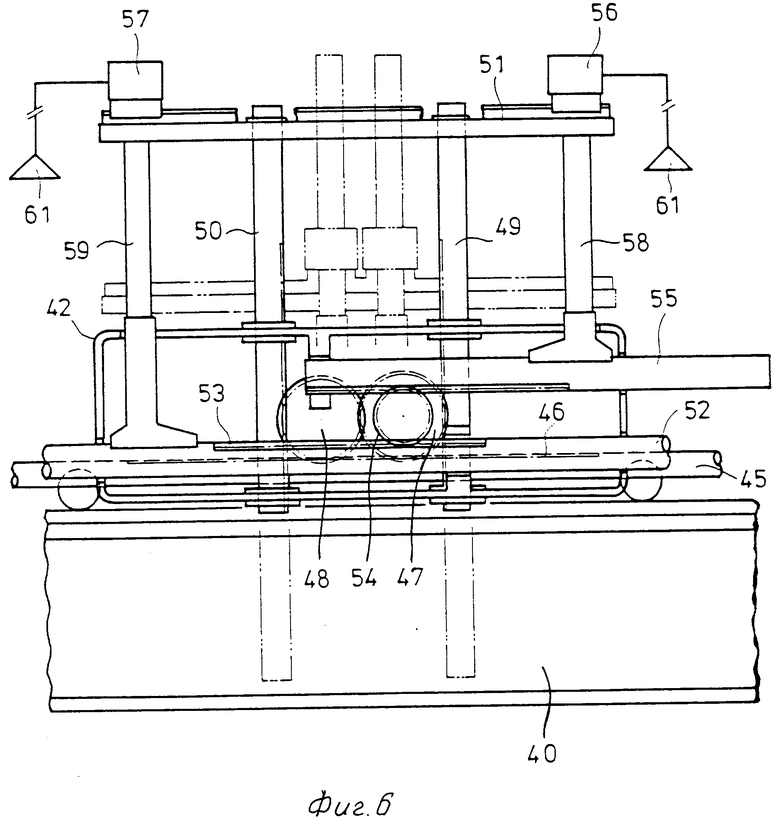
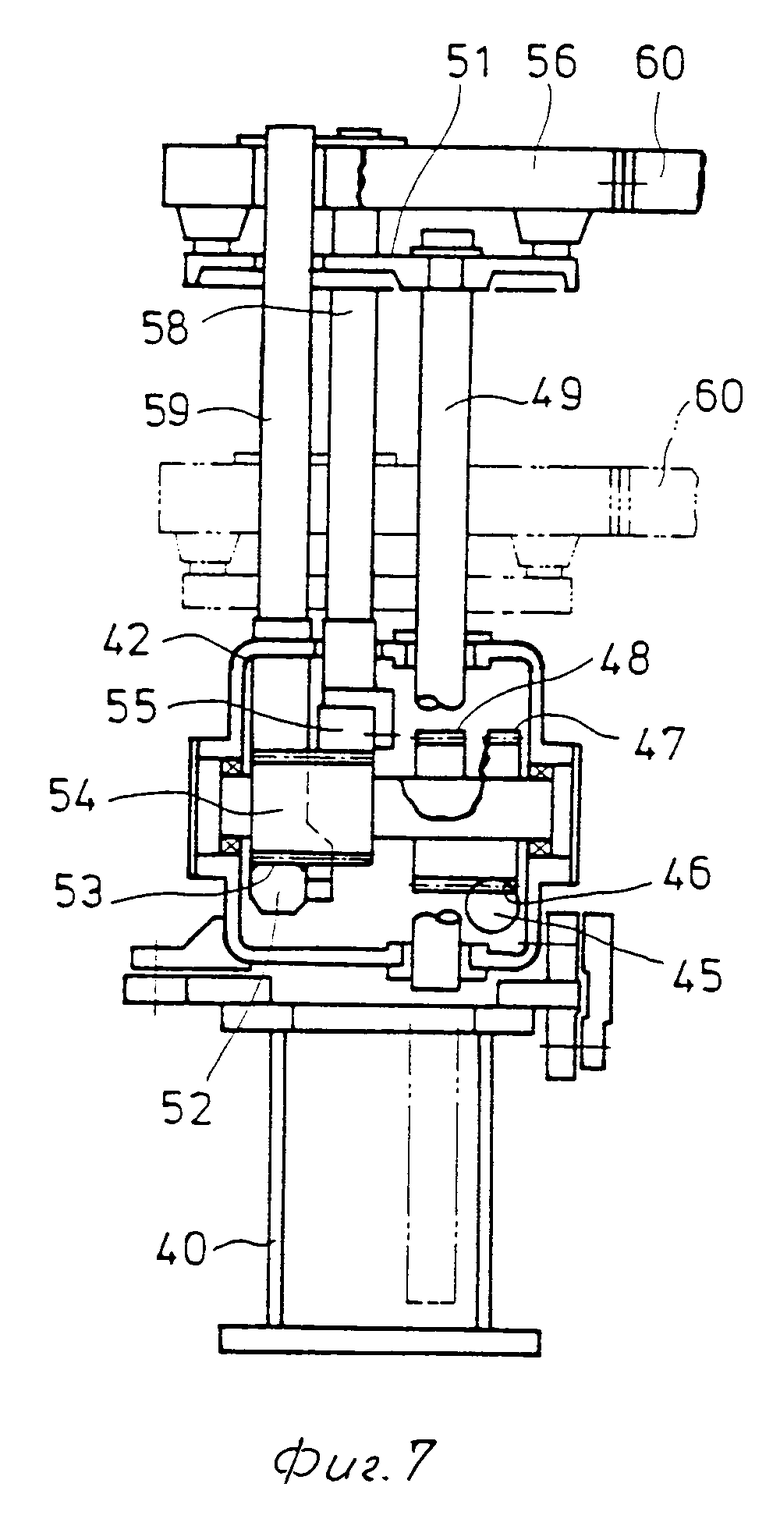
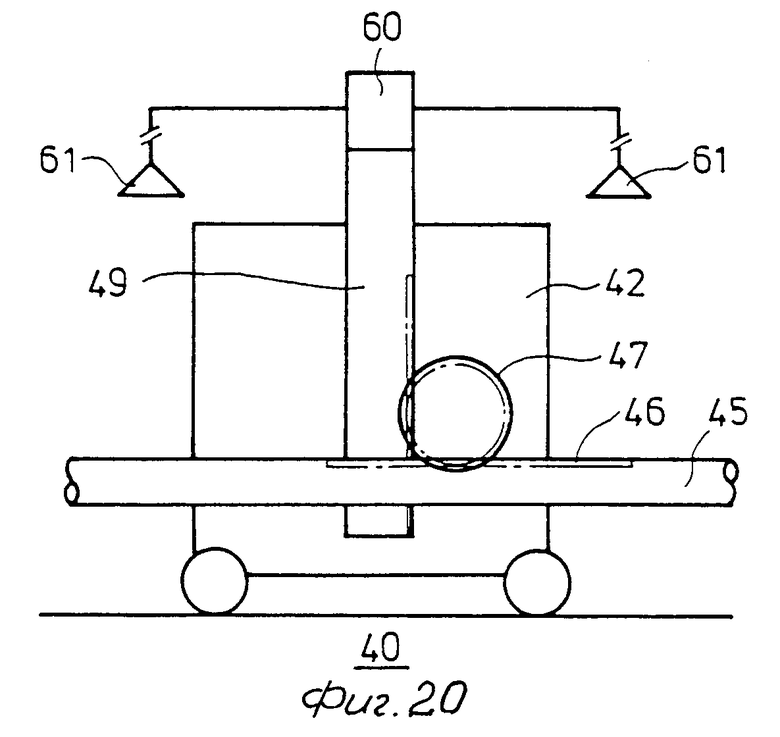
Сквозь каждую тележку 42 проходит с возможностью скольжения подъемная штанга 45, приводимая в возвратно-поступательное движение в направлении поточной линии обработки посредством передаточной приводной системы. Причем часть подъемной штанги 45, находящаяся внутри тележки 42, снабжена зубчатой рейкой 46 и, кроме того, в тележке 42 установлены с возможностью вращения шестерни 47, находящаяся в зацеплении с зубчатой рейкой 46, и шестерня 48, находящаяся в зацеплении с шестерней 47, но не входящая в зацепление с зубчатой рейкой 46. Сквозь тележку 42 проходят по вертикали и выходят на нее сверху вертикальные зубчатые рейки 49 и 50, находящиеся в зацеплении с шестернями 47 и 48 соответственно.
К верхним концам вертикальных зубчатых реек 49 и 50 неподвижно приклеена направляющая плита 51, проходящая в направлении поточной линии, в результате чего она будет совершать вертикальные движения при возвpатно-поступательном движении подъемной штанги 45 в направлении поточной линии.
Сквозь тележку 42 проходят с возможностью скольжения штанга 52 для регулирования расстояния, приводимая в возвратно-поступательное движение посредством передаточной приводной системы, причем часть штанги 52, находящаяся в тележке 42, снабжена зубчатой рейкой 53. Кроме того, в тележке 42 установлена с возможностью вращения шестерня 54, находящаяся в зацеплении с зубчатой рейкой 53.
В тележке 42 также установлена с возможностью движения в направлении поточной линии горизонтальная зубчатая рейка 55, находящаяся в зацеплении с шестерней 54. На направляющей плите 51 установлены с возможностью движения в направлении поточной линии два опорных элемента 56 и 57. Один опорный элемент 56 опирается на верхнюю концевую часть вертикального стержня 58, проходящего с возможностью скольжения сквозь элемент 56, причем нижний конец вертикального стержня 58 неподвижно соединен с горизонтальной зубчатой рейкой 55. Другой опорный элемент 57 опирается на верхнюю концевую часть вертикального стержня 59, проходящего сквозь него с возможностью скольжения, причем нижний конец вертикального стержня 59 неподвижно соединен со штангой 52 для регулирования расстояния.
Таким образом, возвратно-поступательное перемещение штанги 52 для регулирования расстояния в направлении поточной линии будет вызывать перемещение опорных элементов 56 и 57 в направлении друг к другу или друг от друга через посредство шестерен 54, горизонтальной зубчатой рейки 55 и вертикальных стержней 58 и 59.
Между противолежащими опорными элементами 56 и 57 на направляющих 40 и 41 проходят несущие средства для обрабатываемых заготовок, такие как поперечины 60, причем к каждой поперечине прикреплены средства захвата (удержания) обрабатываемых заготовок, такие как вакуумные присоски 61 для присасывания с возможностью освобождения обрабатываемых заготовок, на высоте, соответствующей высоте верхних и нижних штампов 38 и 39 и заготовок 62.
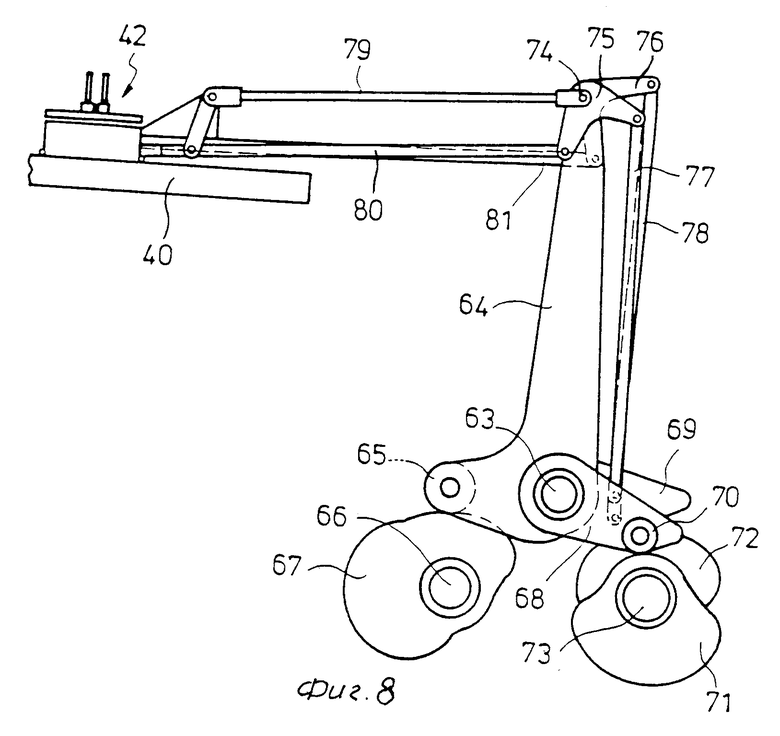
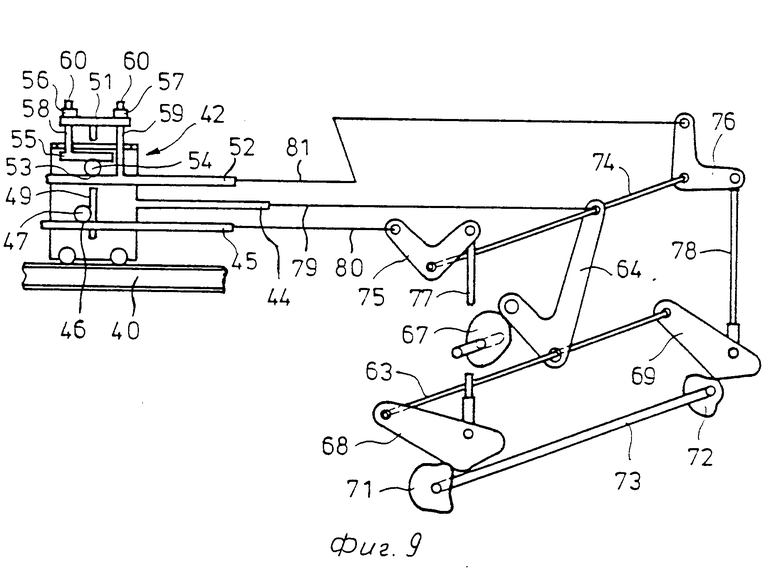
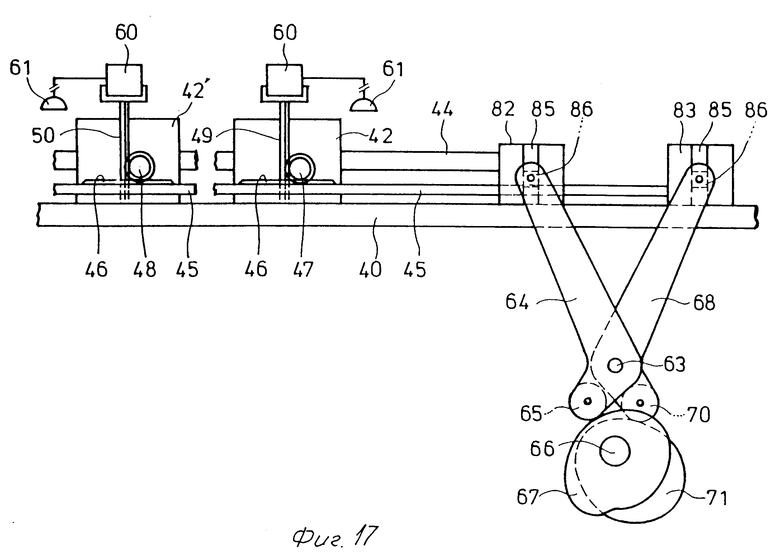
Передаточная приводная система имеет следующую конструкцию. L-образный передаточный рычаг 64, шарнирно закрепленный на оси 63 с возможностью качания в направлении поточной линии, имеет на нижнем конце следящий элемент (ролик) 65, который, в свою очередь, находится в контакте с профильной поверхностью передаточного кулачка 67, установленного на кулачковом валу 66, в результате чего вращение передаточного кулачка 67 будет вызывать качание передаточного рычага 64 вокруг оси 63, сообщаемое через следящий элемент 65 кулачка.
Как показано на фиг.9, одни концы подъемного рычага 68 и рычага 69 для регулирования расстояния прикреплены с возможностью поворота к оси 63, а другие концы рычагов 68 и 69 несут на себе соответственно следящие элементы (ролики) 70, которые, в свою очередь, прижаты соответственно к подъемному кулачку 71 и кулачку 72 для регулирования расстояния, которые установлены на кулачковом валу 73. Сквозь верхнюю концевую часть передаточного рычага 64 проходит горизонтальная ось 74, на одном конце которой установлено с возможностью поворота V-образное подъемное коромысло 75, а на другом - V-образное коромысло 76 для регулирования расстояния.
Верхний и нижний концы подъемной тяги 77, которая параллельна и равна по длине линии соединения между осью 63 качания и горизонтальной осью 74, шарнирно присоединены к одному концу передаточного коромысла 75 и к точке между концами подъемного рычага 68 (соответственно), в результате чего образуется параллелограммный рычажный механизм.
Аналогичным образом, верхний и нижний концы тяги 78 для регулирования расстояния шарнирно присоединены к одному концу коромысла 76 для регулирования расстояния и к точке между концами рычага 69 для регулирования расстояния, в результате чего тоже образуется параллелограммный рычажный механизм. Таким образом, когда передаточный кулачок 67 качает передаточный рычаг 64, подъемное коромысло 75 может совершать независимое качательное движение, сообщаемое ему через подъемный кулачок 71, подъемный рычаг 68 и подъемную тягу 77, причем одновременно коромысло 76 для регулирования расстояния тоже может совершать независимое качательное движение, сообщаемое ему через кулачок 72, рычаг 69 и тягу 78.
Верхний конец передаточного рычага 64 соединен с расположенным выше по потоку концом передаточной штанги 44 посредством соединительной тяги 79, в соответствии же с другим вариантом (без передаточной штанги 44) он может быть непосредственно присоединен к расположенной выше или ниже по потоку крайней тележке 42. Другой конец подъемного коромысла 75 соединен с расположенным ниже по потоку концом подъемной штанги 45 посредством соединительной тяги 80. Другой конец коромысла 76 для регулирования расстояния соединен с расположенным ниже по потоку концом штанги 52 для регулирования расстояния посредством соединительной тяги 81.
Когда передаточный кулачок 67 качает передаточный рычаг 64, соединительная тяга 79 и передаточная штанга 44 перемещается в направлении поточной линии обработки, что вызывает совместное возвратно-поступательное перемещение в направлении поточной линии тележек 42, соединенных друг с другом посредством соединительных штанг 43.
Когда подъемный кулачок 71 качает подъемный рычаг 68 относительно передаточного рычага 64 (при одновременном качании рычага 64), подъемная тяга 77 заставляет качаться подъемное коромысло 75, что вызывает перемещение в направлении поточной линии относительно передаточной штанги 44 соединительной тяги 80 и подъемной штанги 45, в результате чего происходит вертикальное перемещение поперечин 60, сообщаемое через шестерни 47 и 48, вертикальные зубчатые рейки 49 и 50 и направляющую плиту 51.
Аналогичным образом, когда кулачок 72 для регулирования расстояния заставляет рычаг 69 для регулирования расстояния качаться относительно передаточного рычага 64 (одновременно совершающего качательное движение), тяга 78 для регулирования расстояния заставляет качаться коромысло 76 для регулирования расстояния, что вызывает перемещение соединительной тяги 81 и присоединительной к ней штанги 52 для регулирования расстояния в направлении поточной линии относительно передаточной штанги 44. В результате этого пара поперечин 60 совершает движение в направлении друг к другу или друг от друга, сообщаемое через шестерню 54, горизонтальную зубчатую рейку 55, вертикальные стержни 58 и 59 и опорные элементы 56 и 57.
Вышеописанные движения сочетают таким образом, чтобы обеспечить последовательную передачу обрабатываемых заготовок 62 в направлении вниз по потоку и штамповку их на каждой позиции штампования.
Величина вертикального и горизонтального ходов поперечин 60 и согласование по времени их вертикального и горизонтального движений могут быть выбраны произвольно путем изменения профилей подъемного кулачка 71 и кулачка 72 для регулирования расстояния, причем на этот выбор не оказывает вредного влияния ход тележки 42, зависящий от передаточного рычага 64. Когда, вследствие особых профилей и материалов обрабатываемых заготовок 62, нет необходимости в относительном перемещении пары поперечин в направлении друг к другу или друг от друга, профиль кулачка 72 для регулирования расстояния может быть выполнен таким, чтобы он всегда обеспечивал выдерживание заданного значения угла между рычагом 69 для регулирования расстояния и передаточным рычагом 64 при качательном движении.
Передаточная приводная система описанного выше первого варианта проста по конструкции и позволяет свободную установку вертикального и горизонтального ходов пары поперечин 60 и согласования по времени их вертикального и горизонтального движений. Причем длина допустимых ходов может быть большей. Кроме того, составные части соединены шарнирно, поэтому люфт между соединительными частями может быть уменьшен до минимума и, следовательно, операция штамповки может быть выполнена с высокой степенью размерной точности.
Кроме того, передаточное устройство выполнено таким образом, что тележки 42 совершают возвратно-поступательное движение по направляющим 40 и 41, которые при передаче обрабатываемых заготовок 62 ограничены от вертикального перемещения и лишь несущему заготовки средству, содержащему направляющую плиту 51, опорные элементы 56 и 57 пару поперечин 60, опирающихся на тележку 42, позволено во время передачи заготовок перемещаться по вертикали. В результате подъемный механизм сделан компактным и легким и требуется лишь небольшая мощность для перемещения по вертикали поперечин 60. Исключена вибрация (колебания) во время работы подъемного механизма, благодаря чему вакуумные присоски 61 надежно присасывают обрабатываемые заготовки 62 и не отпускают их вследствие вибрации во время работы. Следовательно, становится возможным увеличение скорости поточной линии обработки и тем самым повышение производительности.
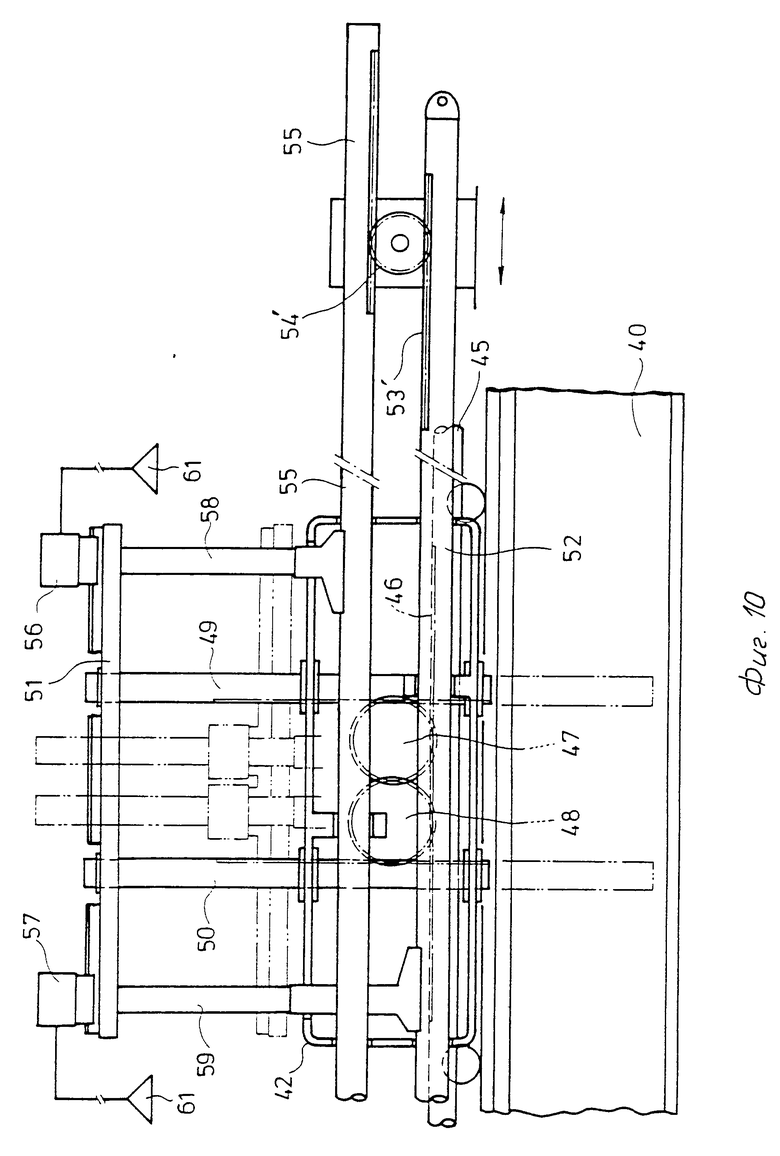
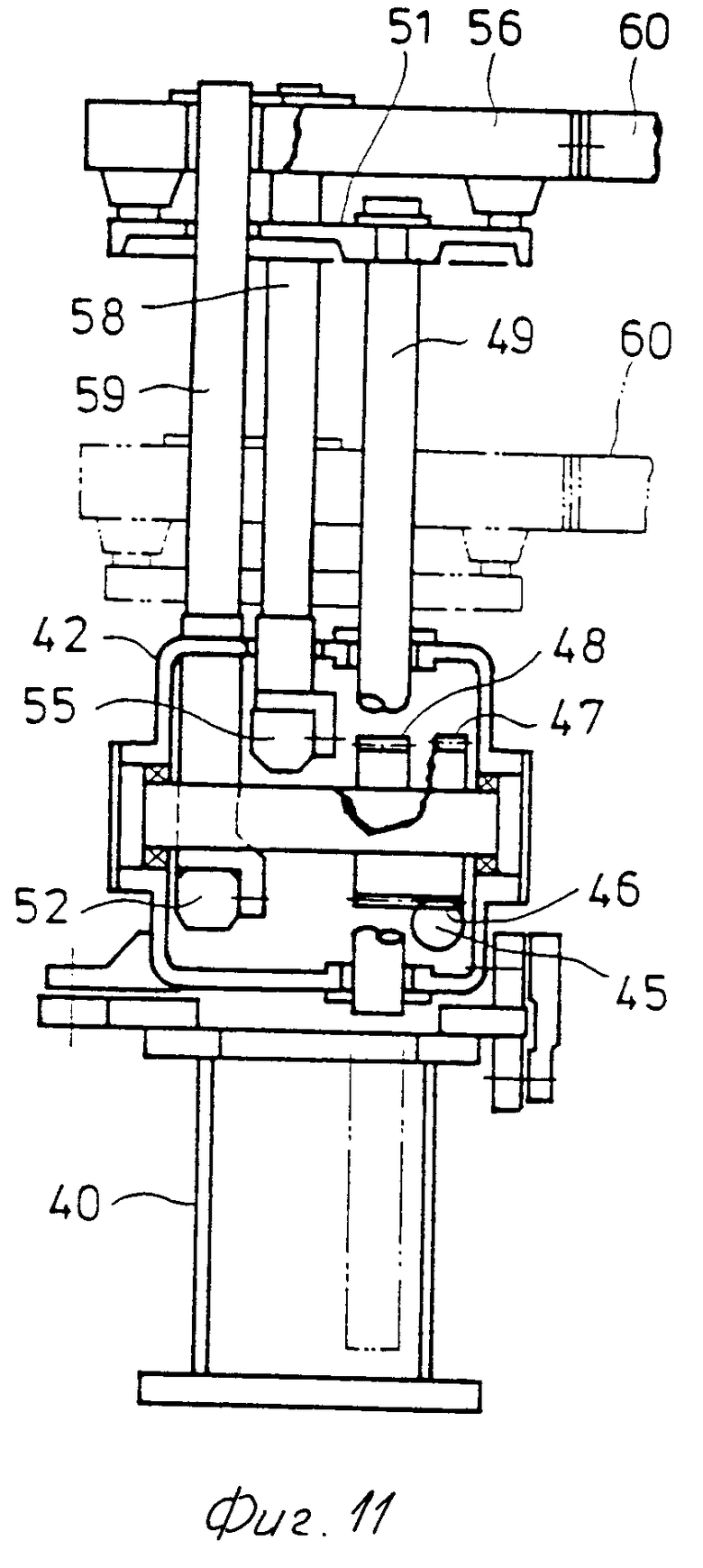
На фиг.10 и 11 показана первая модификация первого варианта осуществления изображения, в которой снаружи тележки 42 выполнены зубчатая рейка 53 штанги 52 для регулирования расстояния и зубчатая часть горизонтальной зубчатой рейки 55, с которыми находится в зацеплении шестерня 54, установленная с возможностью перемещения в направлении поточной линии вместе с тележкой 42. Следовательно, тележка 42 может быть сделана более легкой, благодаря чему может быть увеличена скорость поточной обработки.
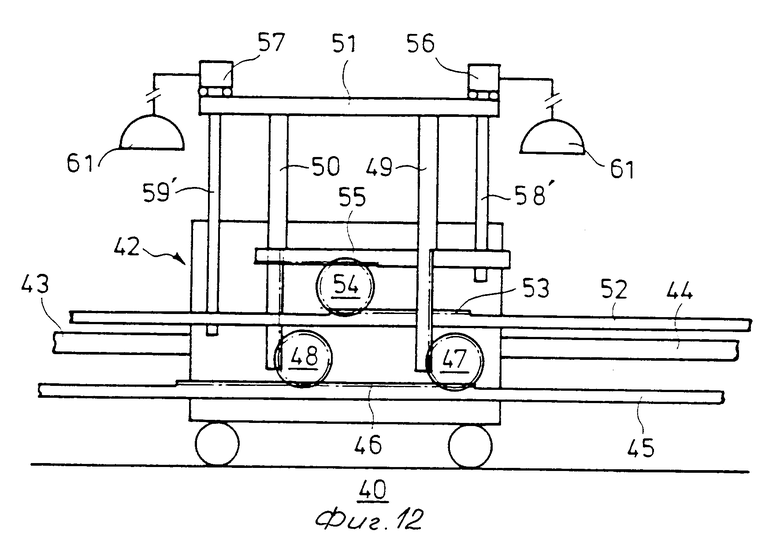
На фиг. 12 показана вторая модификация первого варианта осуществления изобретения, в которой горизонтальная зубчатая рейка 55 и штанга 52 для регулирования расстояния свободно проходят сквозь нижние концевые части вертикальных стержней 58 и 59 и опираются на эти нижние концевые части. Вторая модификация может тоже обеспечить получение таких же результатов и свойств, как и первый вариант.
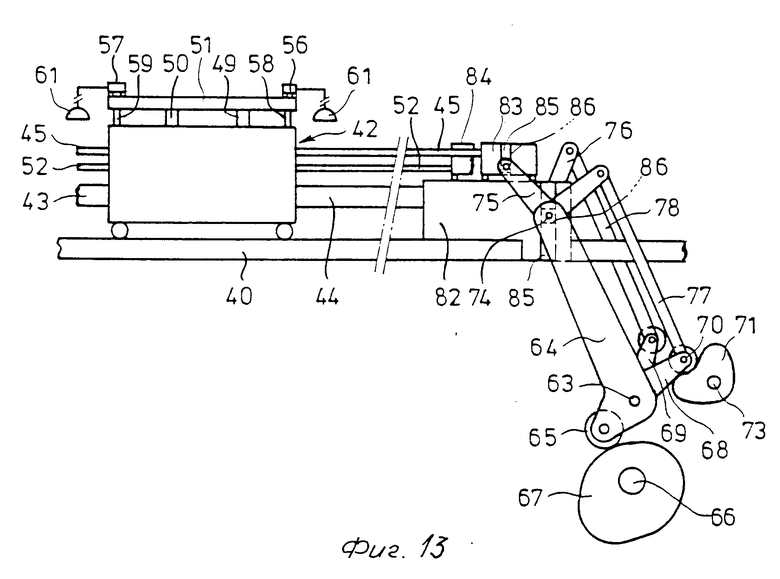
На фиг. 13 показана третья модификация первого варианта осуществления изобретения, в которой передаточный рычаг 64 и передаточная штанга 44 соединены друг с другом посредством каретки 82, выполненной с возможностью перемещения ее в направлении поточной линии по направляющей 40, подъемное коромысло 75 и подъемная штанга 45 соединены друг с другом посредством каретки 83, установленной на каретке 82 с возможностью перемещения в направлении поточной линии, и коромысло 76 для регулирования расстояния и штанга 52 для регулирования расстояния соединены друг с другом посредством каретки 84, установленной на каретке 82 с возможностью перемещения в направлении поточной линии. Третья модификация тоже может обеспечить получение таких же результатов и положительных качеств, как и первый вариант.
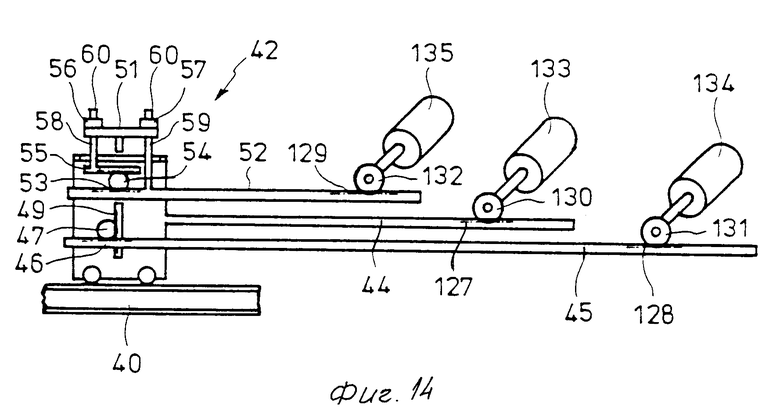
На фиг.14 показана четвертая модификация первого варианта осуществления изобретения, в которой передаточная штанга 44, подъемная штанга 45 и штанга 52 для регулирования расстояния снабжены зубчатыми рейками 127, 128 и 129 (соответственно), которые, в свою очередь, находятся в зацеплении с шестернями 130, 131 и 132 (соответственно), установленными на приводных валах электродвигателей 133, 134 и 135 (соответственно), таких, как серводвигателя, в результате чего при включении указанных электродвигателей 133, 134 и 135 передаточная штанга 44, подъемная штанга 45 и штанга 52 для регулирования расстояния будут совершать возвратно-поступательное движение в направлении поточной линии. Четвертая модификация тоже может обеспечить получение таких же результатов и положительных качеств, как и первый вариант.
Второй вариант.
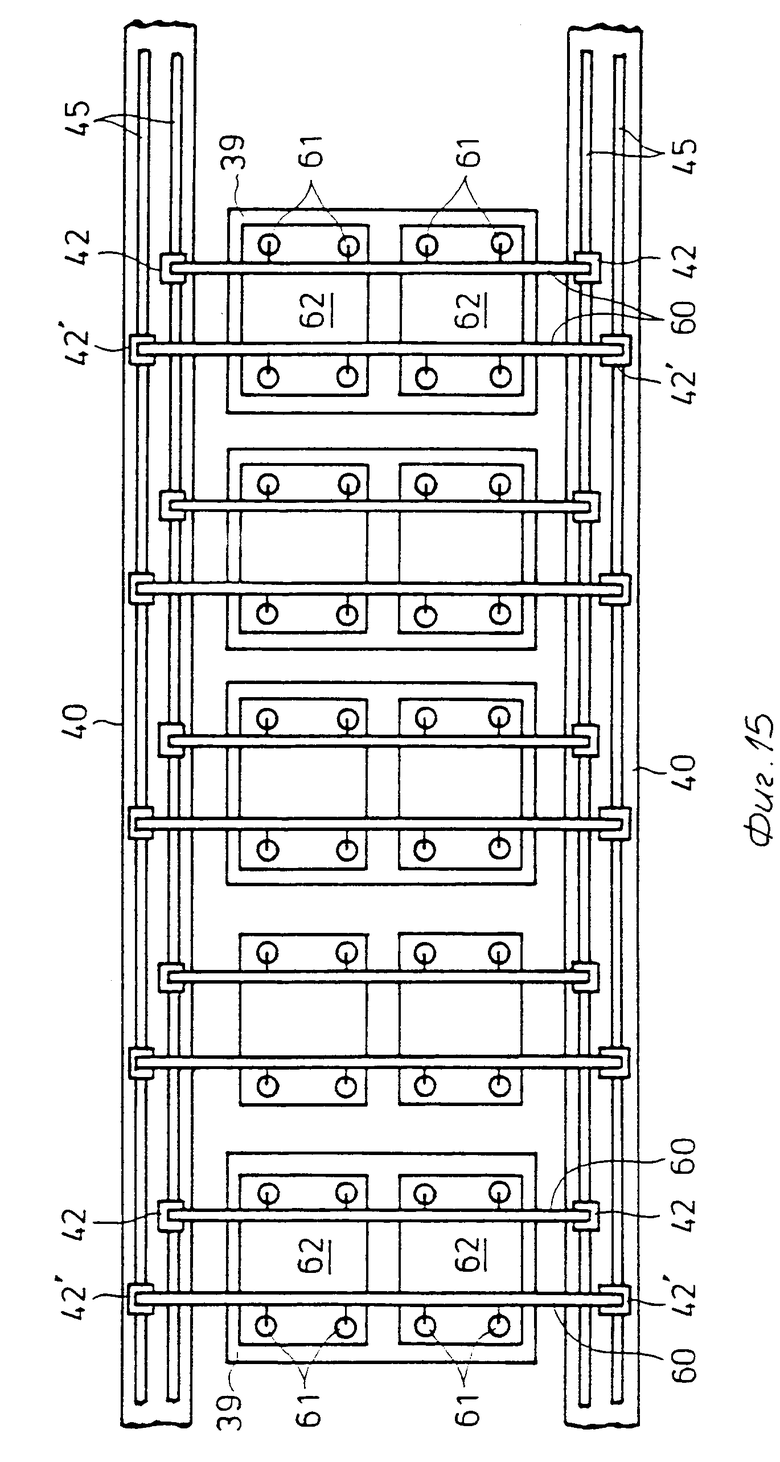
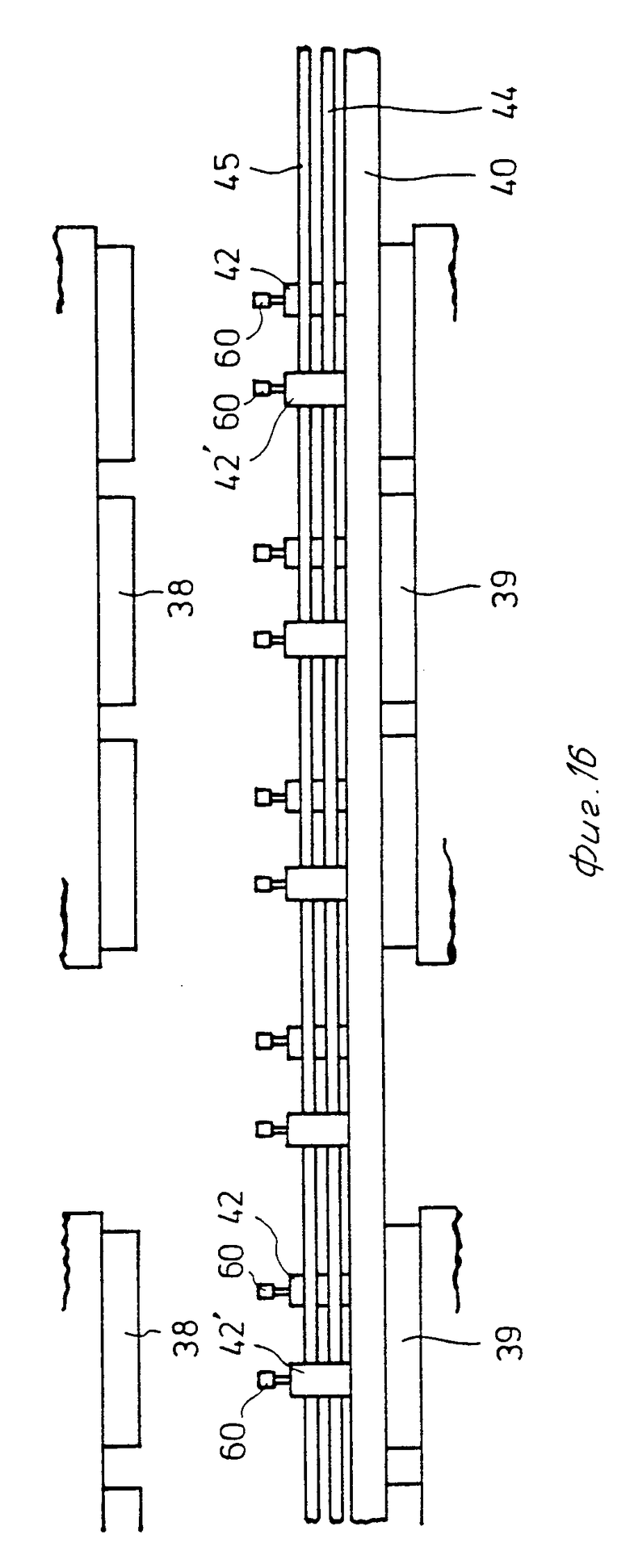
Со ссылками на фиг.15-17 описан второй вариант осуществления изобретения, который аналогичен конструкции первому варианту, за исключением того, что пары поперечин 60 опираются на две пары расположенных в поперечном направлении напротив друг друга тележек 42 и 42' (соответственно), благодаря чему поперечины 60 могут быть перемещены по вертикали независимо друг от друга. Тележки 42 и 42' кинематически связаны с двумя передаточными приводными системами, каждая из которых содержит передаточный рычаг 44, подъемный рычаг 68 и т.д. На фиг.17 приводная система для перемещения тележки 42' не показана. Приводные системы, показанные на фиг.8, 13 и 14 могут быть сконструированы и изготовлены так, чтобы они имели только передаточный механизм.
Во втором варианте передаточные рычаги 64 в двух приводных системах приводят в действие независимо друг от друга, чтобы выполнить операцию передачи обрабатываемых заготовок и осуществить перемещение в направлении друг к другу или друг от друга одного комплекта тележек 42 и 42' и, следовательно, пары поперечин 60.
Как и в первом варианте, подъемный механизм в соответствии со вторым вариантом может быть сделан компактным по размерам и легких по весу, благодаря чему движущая сила может быть уменьшена. Кроме того, может быть предотвращено падение заготовок время передачи, благодаря чему может быть увеличена скорость поточной линии и, следовательно, повышена производительность. К тому же подъемный механизм, входящий в состав каждой тележки, легче, чем в первом варианте, благодаря чему может быть дополнительно увеличена скорость поточной линии.
Третий вариант.
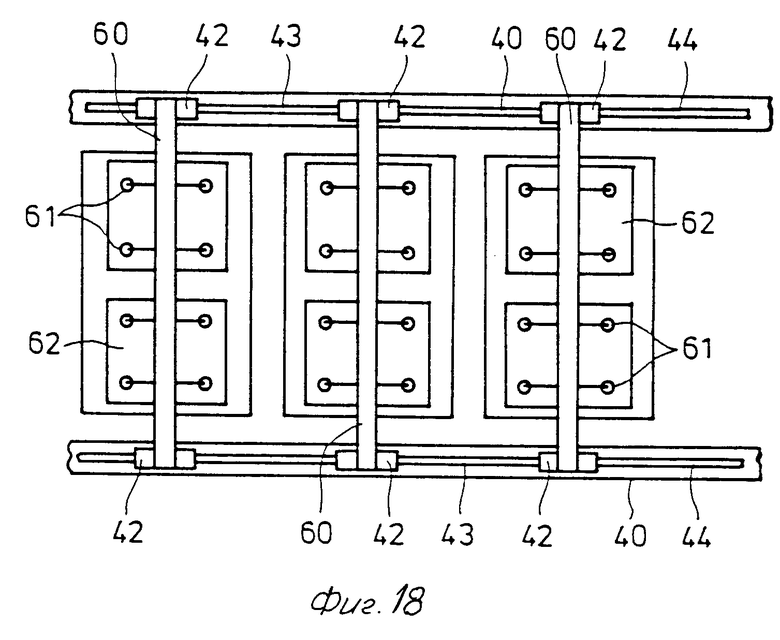
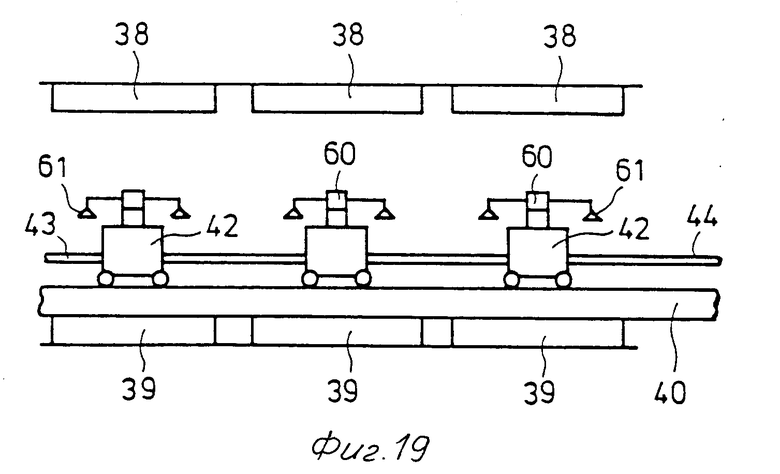
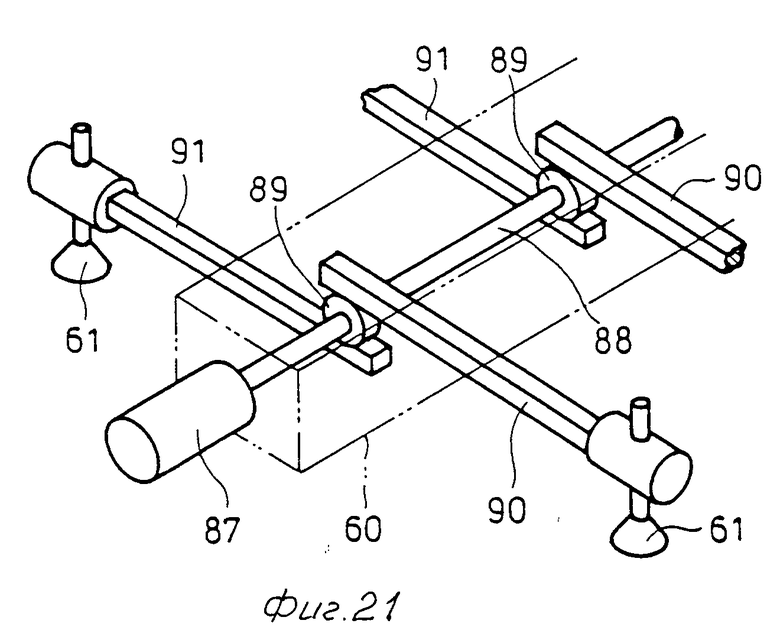
Со ссылками на фиг. 18-21 ниже описан вариант осуществления изобретения, который, аналогичен по конструкции первому варианту, за исключением следующих отличий. Пара расположенных напротив друг друга тележек 42 несет на себе только одну поперечину 60, установленную с возможностью перемещения ее в вертикальном направлении. Сквозь поперечину 60 в продольном ее направлении проходит вал 88, приводимый во вращение посредством электродвигателя 87. На валу 88 установлено множество шестерен 89, расположенных по валу с определенным между ними промежутком. Каждая шестерня находится в зацеплении с двумя, верхней и нижней, зубчатыми рейками 90 и 91, проходящими в направлении поточной линии, причем на дальних от шестерни 89 концах зубчатых реек 90 и 91 закреплены вакуумные присоски 61. При включении электродвигателя, например серводвигателя, верхняя и нижняя зубчатые рейки 90 и 91 совершают движение в противоположных направлениях, передаваемое им через вал 88 и шестерню 89, в результате чего поперечина 60 движется в направлении к расположенным выше и ниже по потоку соседним поперечинам или в направлении от них.
В соответствии с третьим вариантом, как и в описанном выше втором варианте, подъемный механизм может быть сделан компактным по размерам и легким по весу, благодаря чему может быть уменьшена движущая сила и могут быть предотвращены отрыв обрабатываемых заготовок 62 от вакуумных присосок 61 и их падение. В результате появляется возможность увеличения скорости поточной линии и, следовательно, повышения производительности. Кроме того, тележка 42 может быть сделана легкой, благодаря чему может быть дополнительно увеличена скорость поточной линии.
Если перемещение для регулирования расстояния не требуется, что зависит от типа и разновидности обрабатываемых заготовок 62, то вакуумные присоски 61 могут быть прикреплены непосредственно к поперечине 60.
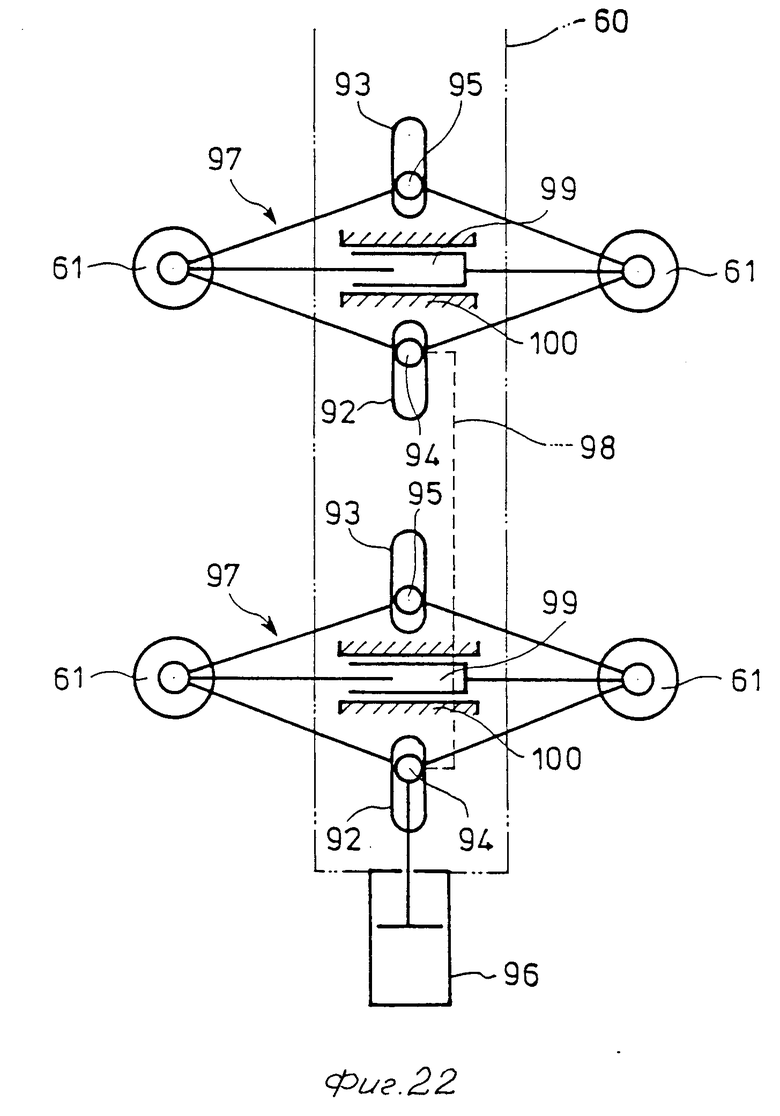
На фиг. 22 показана модификация третьего варианта осуществления изобретения, в которой поперечина 60 имеет пары продолговатых сквозных пазов 93, распределенных в продольном направлении поперечины 60. В продолговатые пазы 92 и 93 входят с возможностью скольжения пальцы 94 и 95 (соответственно), причем один палец 94 соединен с поршневым штоком цилиндра 96, выдвигаемым и втягиваемым в продольном направлении поперечины 60. К пальцу 94 присоединены два соседних звена пантографа 97, два остальных звена которого присоединены к пальцу 95, т.е. две противоположные вершины пантографа (параллелограмма) 97 присоединены к пальцам 94 и 95, остальные две противоположные вершины пантографа 97 - к вакуумным присоскам 61. Таким образом, при выдвижении или втягивании поршневого штока цилиндра 96 пальцы 94 и 95 смещаются в продолговатых пазах 92 и 93 (соответственно), в результате чего пантограф 97 заставляет вакуумные присоски 61 перемещаться в направлении друг к другу или друг от друга. Модификация третьего варианта описанной конструкции тоже может обеспечить таких же результатов и положительных качеств, как и третий вариант.
На фиг.22 позицией 98 обозначено звено, соединяющее между собой пальцы 94, позицией 99 - раздвижной диагональный элемент, соединяющий друг с другом вакуумные присоски 61, и позицией 100 - направляющая, выполненная проходящей через поперечину 60 и предназначенная для направления диагонального элемента 99.
Четвертый вариант.
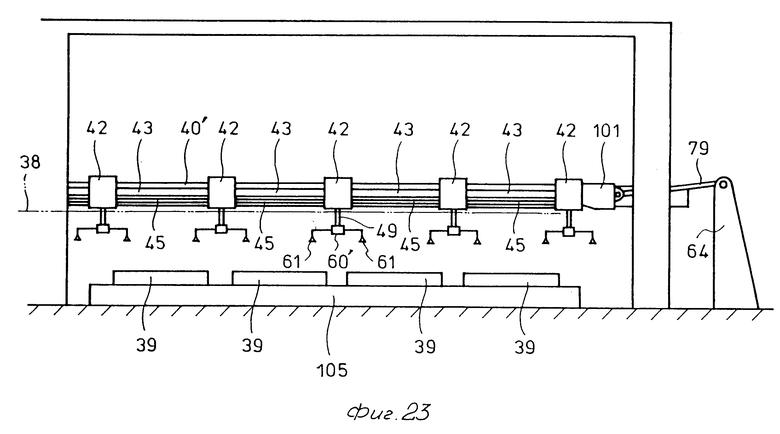
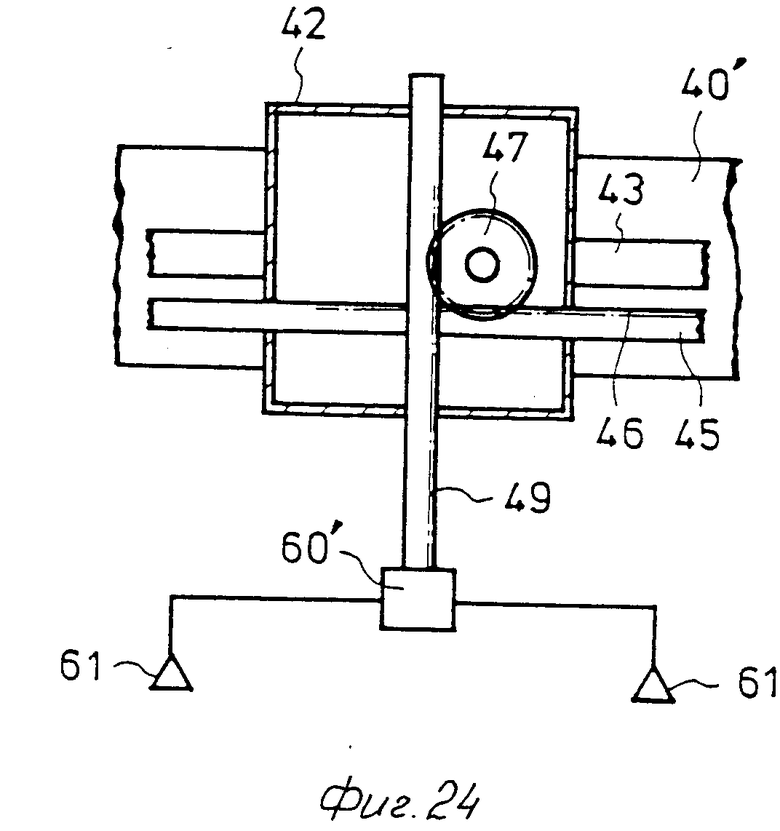
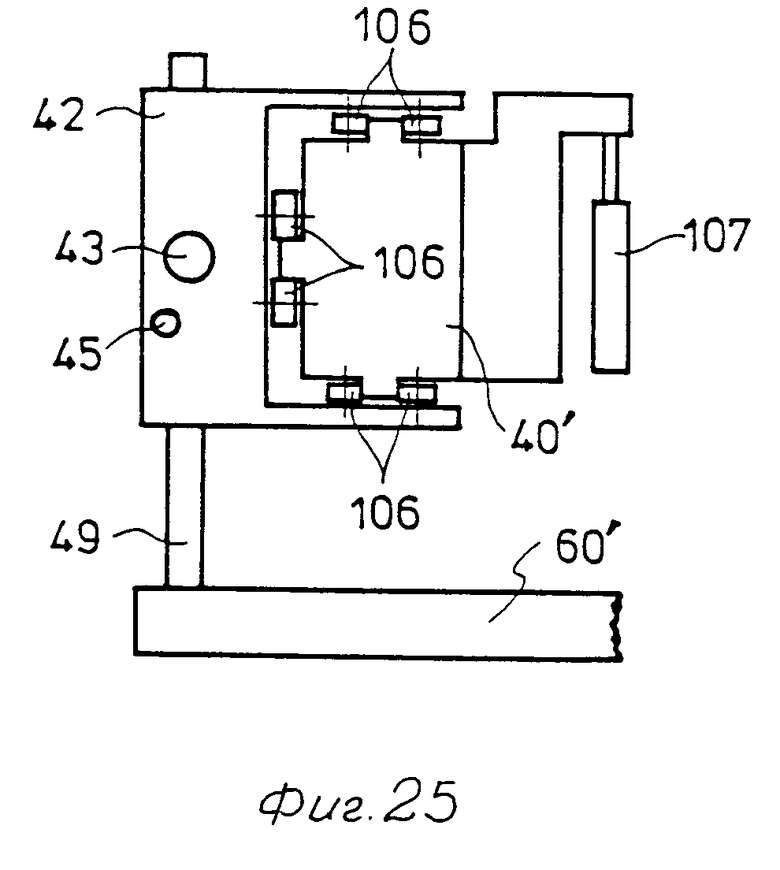
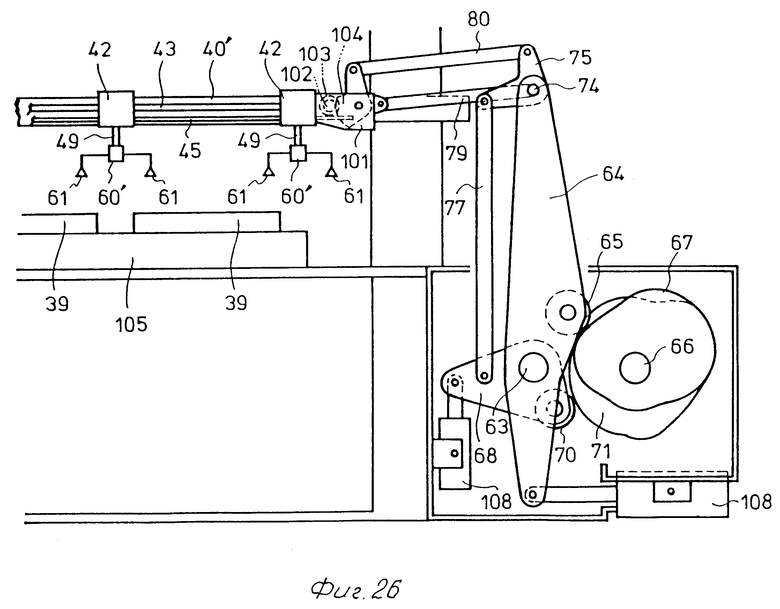
На фиг.23-26 показан четвертый вариант осуществления изобретения, который, аналогичен по конструкции третьему варианту, за исключением того, что направляющая 40' расположена в одной плоскости с верхней поверхностью верхнего штампа 38 или выше этой поверхности, когда штамп 38 отведен в положение над нижним штампом 39 во время замены верхнего и нижнего штампов 38 и 39 в прессе и поперечина 60' неподвижно прикреплена к нижнему концу вертикальной зубчатой рейки 49.
Зубчатая передача 101, установленная на расположенной ниже по потоку крайней тележке 42, присоединена к тяге 79, идущей от верхней концевой части передаточного рычага 64. Тяга 80 отходит от верхней концевой части подъемного коромысла 75 и присоединена к зубчатому сектору 104, который передает движущую силу к подъемной штанге 45 через шестерни 102 и 103, установленные в зубчатой передаче 101.
Позицией 105 обозначена подштампованная плита, на которую устанавливают нижний штамп 39 при смене верхнего и нижнего штампов 38 и 39, позицией 106 - ролики, прикрепленные к тележке 42, позицией 107 - цилиндр для регулирования высоты направляющей 40 и позицией 108 - прижимной цилиндр.
Вместо непосредственного прикрепления к поперечине 60 вакуумные присоски 61 могут быть установлены на поперечине косвенным образом с возможностью перемещения для регулирования расстояния, как в третьем варианте.
В соответствии с четвертым вариантом осуществления изобретения подъемный механизм может быть сделан компактным и легким, благодаря чему может быть уменьшена движущая сила и могут быть предотвращены отрыв обрабатываемых заготовок 62 от вакуумных присосок 61 и их падение. В результате может быть увеличена скорость поточной линии и, следовательно, повышена производительность.
Кроме того, в соответствии с четвертым вариантом направляющая 40 расположена высоко, благодаря чему при обслуживании или смене верхнего и нижнего штампов 38 и 39 нет необходимости поднимать и отводить направляющую 40, так, что смена или обслуживание штампов 38 и 39 могут быть осуществлены в течение относительно короткого периода времени, что даст возможность дополнительно повысить производительность.
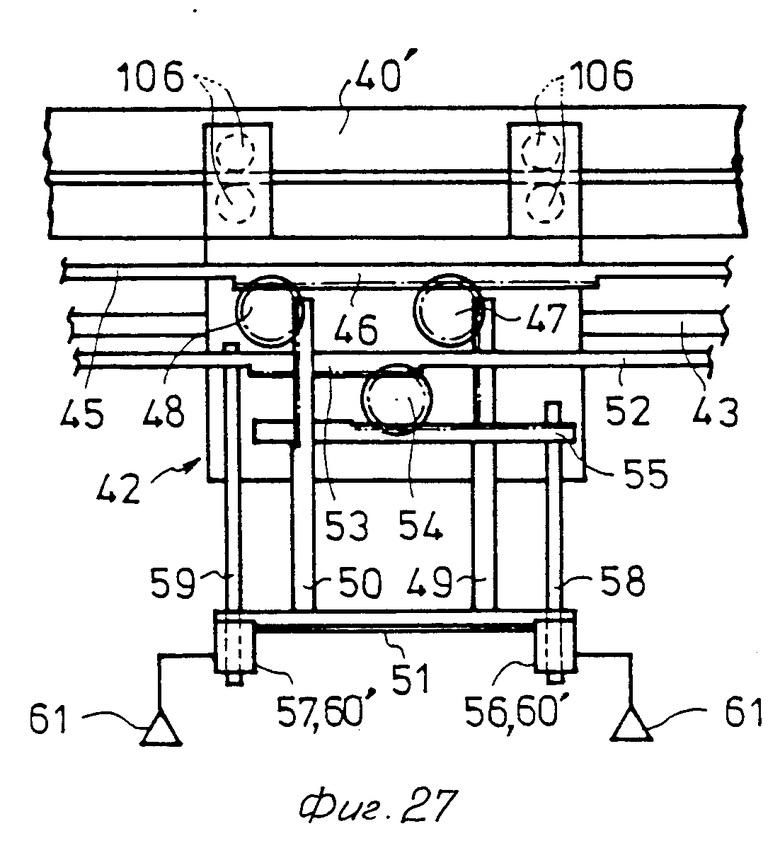
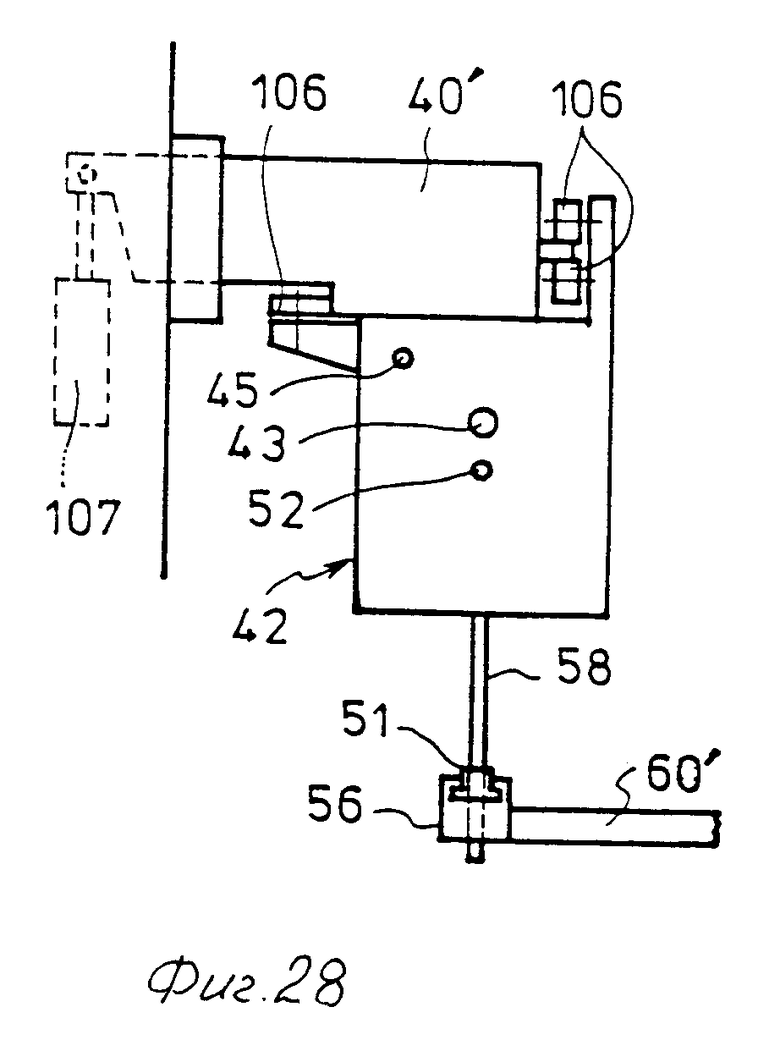
На фиг. 27 и 28 показана первая модификация четвертого варианта осуществления изобретения, в которой, как в первом варианте, пара поперечин 60 опирается на тележки 42, расположенные в поперечном направлении напротив друг друга.
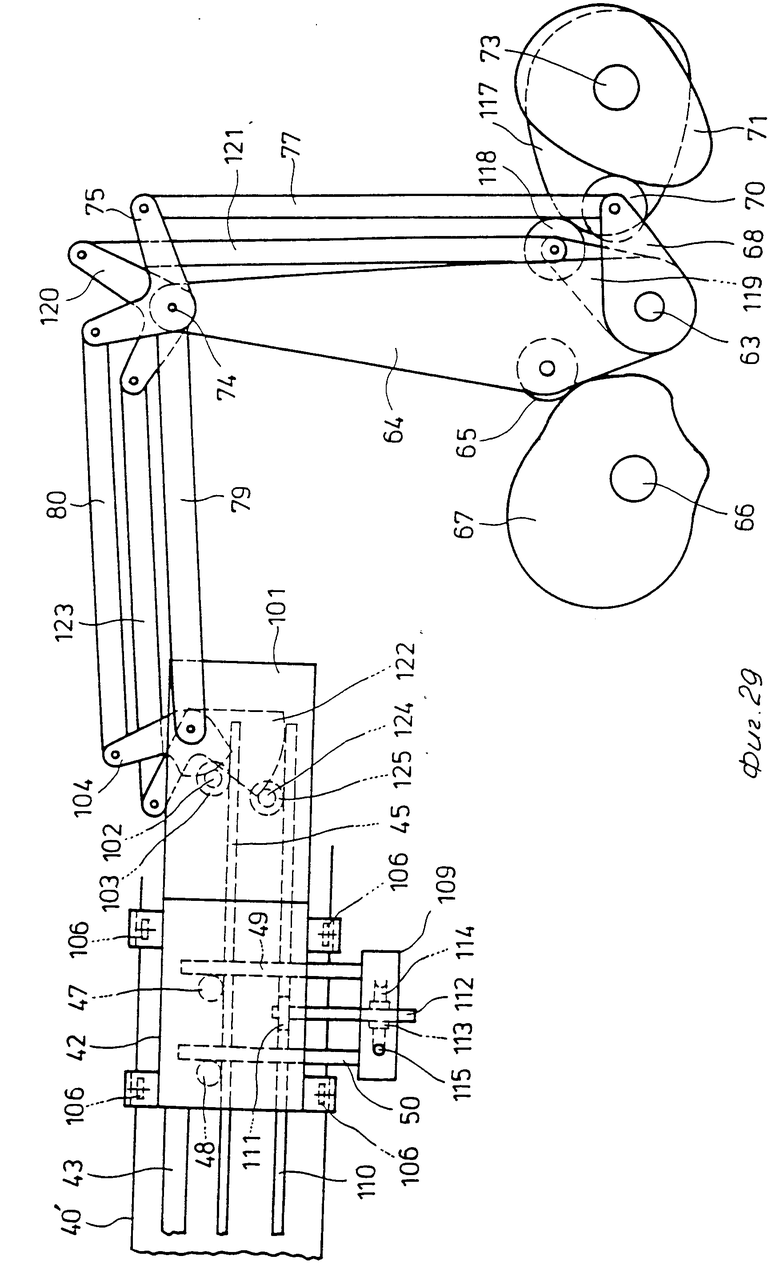
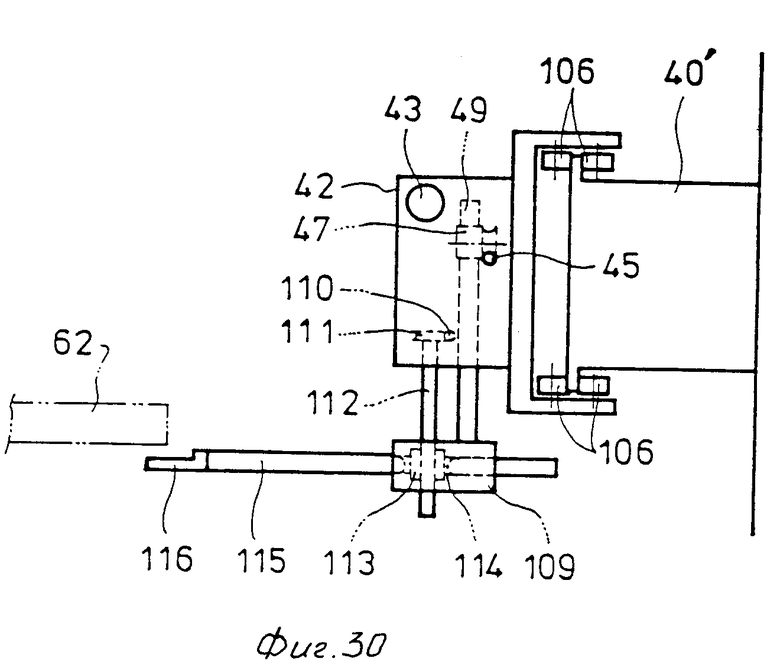
На фиг. 29 и 30 показана вторая модификация четвертого варианта осуществления изобретения. К нижним концам вертикальных зубчатых реек 49 и 50 неподвижно прикреплен поддерживающий элемент 109. Сквозь тележку 42 проходит разжимно-сжимная зубчатая рейка 110, совершающая возвратно-поступательное движение в направлении поточной линии. Верхний конец вертикального вращающего вала 112, установленного с возможностью вращения на подшипниках (не показаны) в тележке 42, неподвижно закреплен в центре вращения шестерни 111, находящейся в зацеплении с зубчатой рейкой 110, а нижняя концевая часть вала 112 проходит сквозь поддерживающий элемент 109. В последнем установлен охватывающий вал 112 линейный подшипник (направляющая качения) 113, который может вращаться вместе с вращающимся валом 112 и скользить в осевом направлении этого вала. Наружную периферию линейного подшипника 113 охватывает неподвижно закрепленная на ней шестерня 114, находящаяся в зацеплении с зубчатой рейкой несущего средства 115 для заготовок, такого как пальцеобразная штанга, проходящая перпендикулярно к направлению поточной линии и свободно проходящая сквозь поддерживающий элемент 109. К концу пальцеобразной штанги 115 близко к штампу присоединено средство 116 для захватывания заготовок, например, палец, так, что при перемещении разжимно-сжимной зубчатой рейки 110 в направлении поточной линии палец 116 на конце штанги 115 может быть разжат или сжат в направлении, перпендикулярном к направлению поточной линии.
Кроме того, разжимно-сжимной рычаг 119, установленный с возможностью качания на оси 63 и приводимый в движение через посредство следящего ролика 118 и разжимно-сжимного кулачка 117, вращаемого с помощью приводного средства (не показано), L-образный разжимно-сжимной рычаг 120, прикрепленный к верхнему концу передаточного рычага 64, и разжимно-сжимная тяга 121, верхний и нижний концы которой шарнирно прикреплены к плечу L-образного рычага 120 и разжимно-сжимного рычага 119 (соответственно) образуют параллелограммный рычажный механизм. А тяга 123, равная по длине тяге 79, соединяет другое плечо L-образного рычага 120 с зубчатым сектором 122, установленным в зубчатой передаче 101, в результате чего получается второй параллелограмный рычажный механизм. Таким образом, движущую силу передают к разжимно-сжимной зубчатой рейке 110 через шестерню 124, находящуюся в зацеплении с зубчатым сектором 122, установленный в зубчатой передаче 101, и шестерню 125, установленную на валу шестерни 124 соосно в ней.
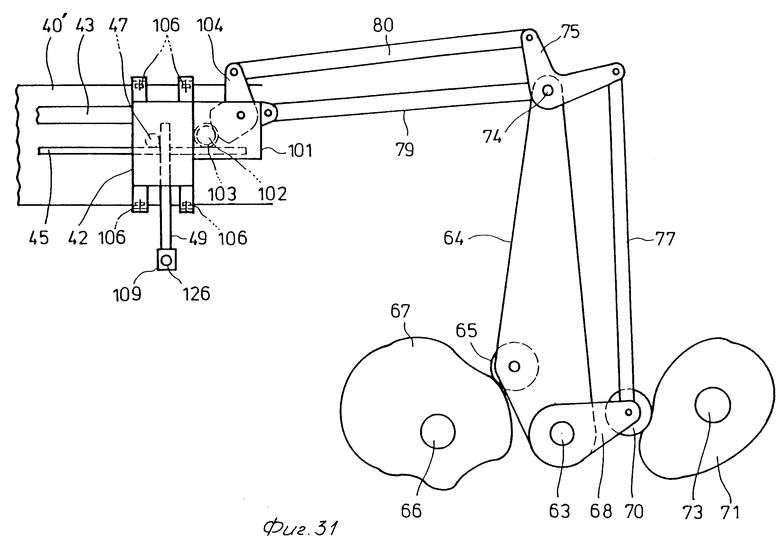
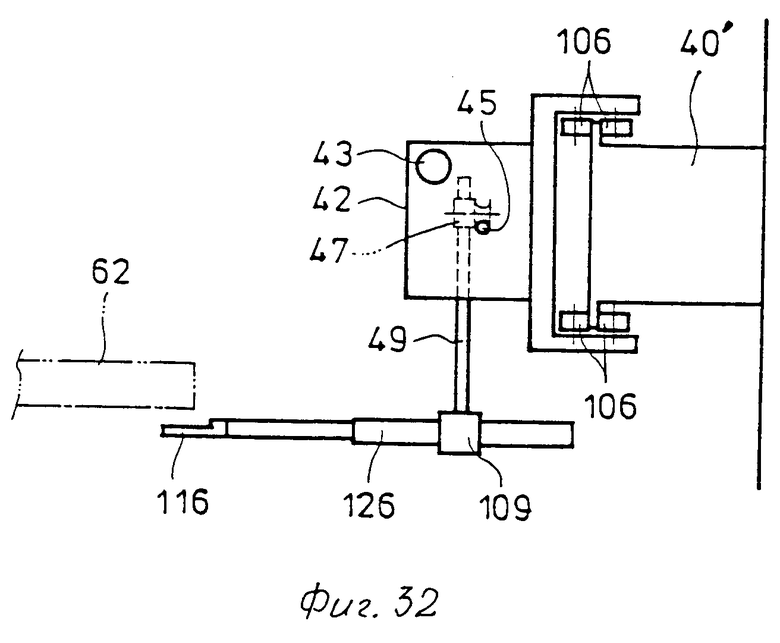
На фиг.31 и 32 показана третья модификация четвертого варианта осуществления изобретения, которая аналогична по конструкции второй модификации, описанной выше со ссылками на фигуры 29 и 30, за исключением того, что палец 116 разжимают или сжимают посредством цилиндра 126.
Пятый вариант.
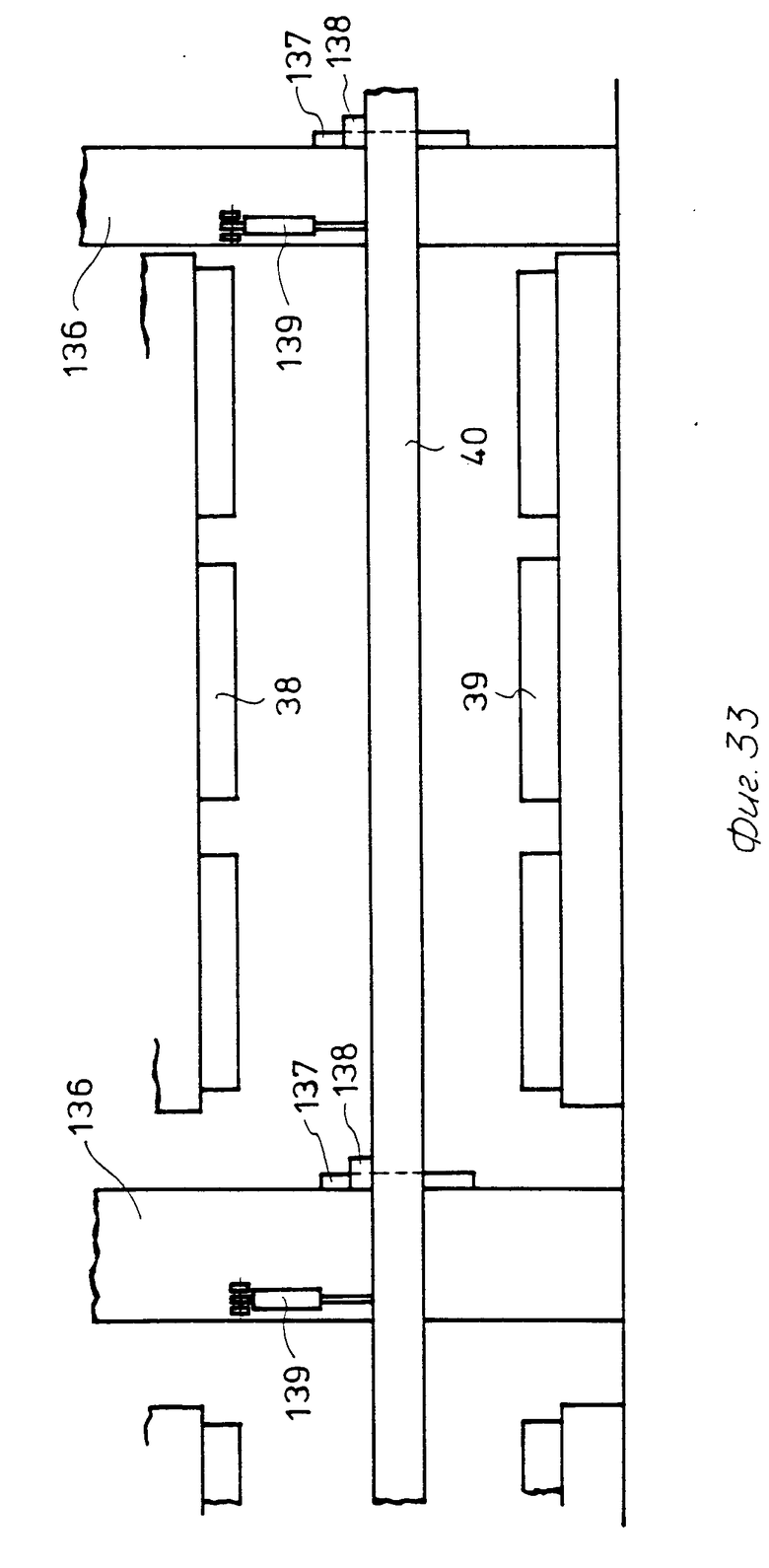
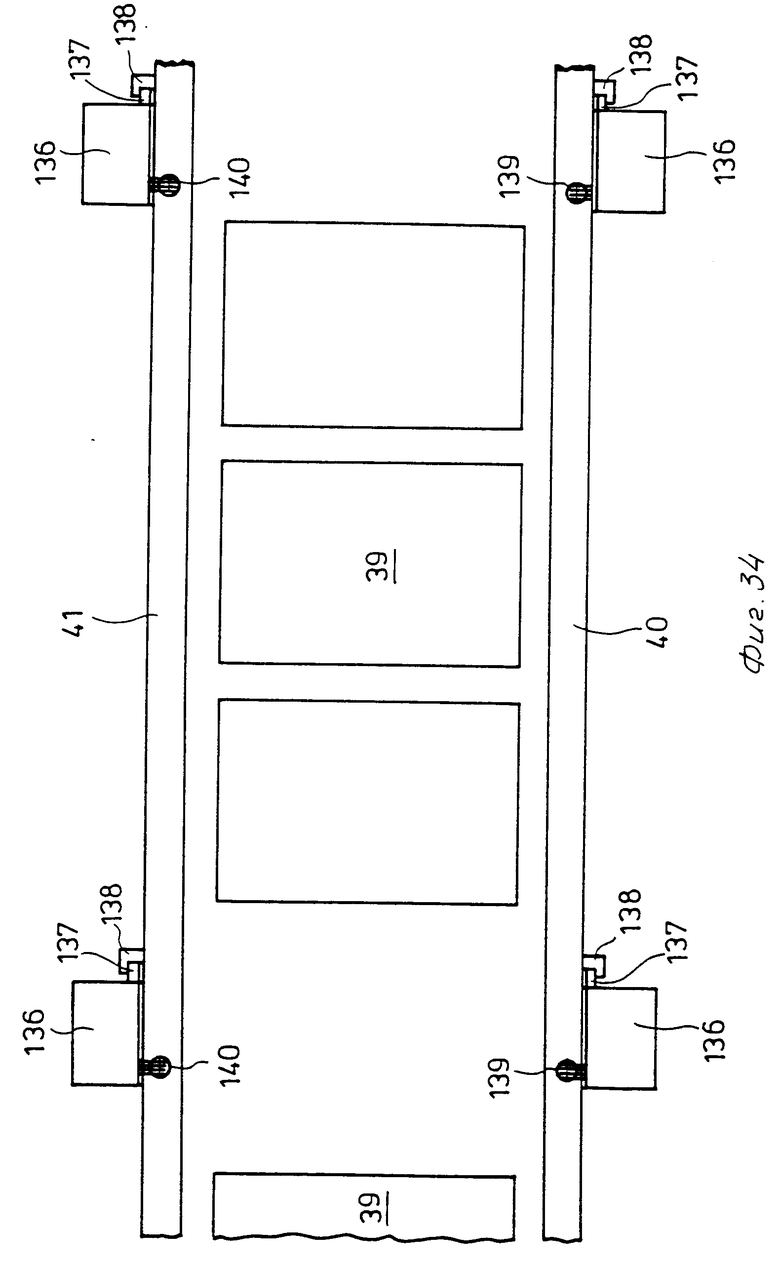
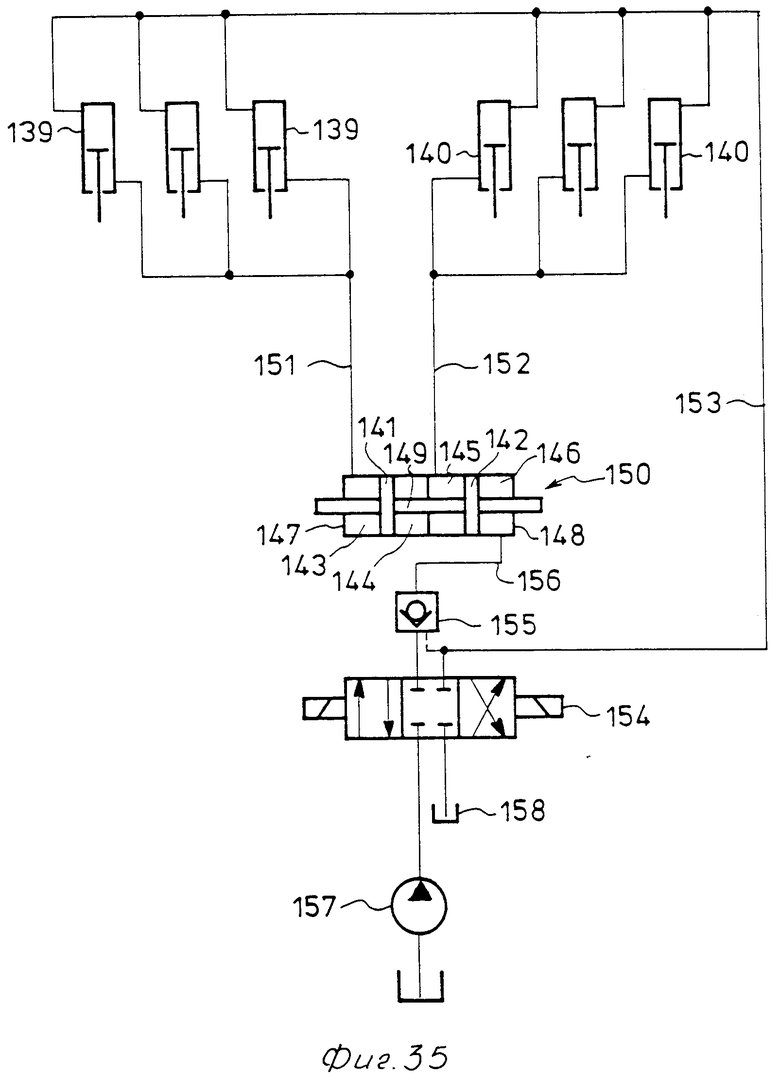
На фиг. 33-35 показан пятый вариант осуществления изобретения, который аналогичен по конструкции любому, от первого до четвертого включительно вариантов, за исключением того, что колонны 136 для многопозиционных прессов соответственно имеют вертикальные направляющие элементы 137, по которым могут скользить направляющие детали 138. Последние прикреплены к паре направляющих 40 и 41 и несут их на себе при перемещении в вертикальном направлении по колоннам 136. Колонны 136 и направляющие 40 и 41 соединены друг с другом посредством цилиндров 139 и 140 соответственно, которые служат в качестве средства для регулирования высоты. Цилиндры 139 и 140 для направляющих 40 и 41 соответственно сообщаются с синхронизирующим цилиндром 150, который содержит две части 147 и 148 (фиг.35). В частности, часть 147 цилиндра имеет поршень 141 и две напорные камеры 143 и 144 для жидкости под давлением с обеих сторон поршня 141.
Аналогичным образом, часть 148 цилиндра имеет поршень 142 и две напорные камеры 145 и 146 с обеих сторон поршня 142. Части 147 и 148 цилиндра соединены друг с другом последовательно посредством штока 149, в результате чего получается синхронизирующий цилиндр 150. Напорные камеры 143 и 145 частей 147 и 148 цилиндра сообщаются через трубопроводы 151 и 152 с расположенными со стороны штока камерами цилиндров 139 и 140. Камеры цилиндров 139 и 140, расположенные со стороны днища поршня, сообщаются через трубопровод 153 с распределительным клапаном 154, который сообщается с напорной камерой части 148 синхронизирующего цилиндра 150 через трубопровод 156, имеющий обратный клапан 155 управления и сообщающийся через отверстие управления с трубопроводом 153. Распределительный клапан 154 сообщается также с насосом 157 и с баком 158.
Пятый вариант может обеспечить получение таких же результатов и положительных качеств, как и любой из описанных выше вариантов, от первого до пятого. Кроме того, в соответствии с этим вариантом при штамповке высота расположения направляющих 40 и 41 может быть отрегулирована в соответствии с высотой штампов 38 и 39 и/или высотой обрабатываемых заготовок, подлежащих передаче, путем раздвигания и сдвигания цилиндров 139 и 10. При смене штампов 38 и 39 или при техническом обслуживании многопозиционных прессов направляющие 40 и 41 могут быть отведены в положения, в которых они не создают помех. В частности, направляющие 40 и 41 могут быть подняты путем подачи рабочей жидкости из бака 158 через распределительный клапан 154 и синхронизирующий цилиндр 150 в расположенные со стороны штока камеры цилиндров 139 и 140 для сдвигания цилиндров 139 и 140 или же направляющие 40 и 41 могут быть опущены вниз путем подачи рабочей жидкости в расположенные со стороны днища поршня камеры цилиндров 139 для раздвигания последних.
Камеры 143 и 145 синхронизирующего цилиндра 150 выполнены с возможностью одинакового их изменения в объеме, благодаря чему обе направляющие 40 и 41 могут быть отрегулированы по высоте синхронно.
Обратный клапан 155 управления в трубопроводе 156 служит для предотвращения обратного потока из синхронизирующего цилиндра 150, благодаря чему направляющие 40 и 41 могут быть удержаны на установленной высоте. Когда нужно опустить направляющие 40 и 41, воздействуют на обратный клапан 155 рабочей жидкости в трубопроводе 153 через отверстие управления обратного клапана, чтобы открыть этот клапан, в результате чего рабочая жидкость может быть выпущена из трубопровода 156 в бак 158.
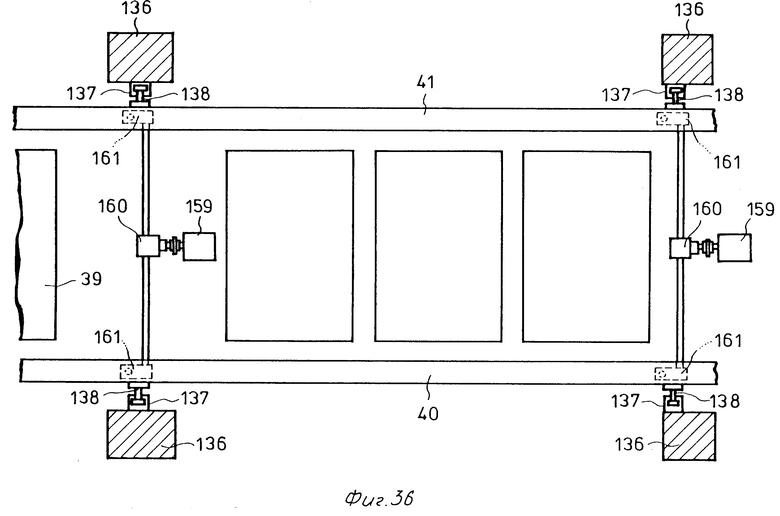
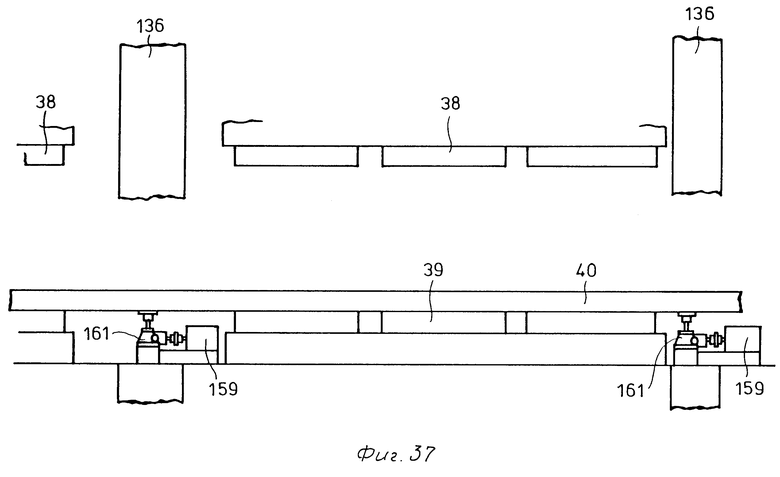
На фиг. 36 и 37 показана первая модификация пятого варианта, в которой вместо цилиндров, используемых в пятом варианте, в качестве средств для регулирования высоты используют домкраты 161, которые приводят в действие посредством электродвигателей 159 и зубчатых передач 160. Эта модификация может обеспечить получение таких же результатов и положительных качеств, как и пятый вариант.
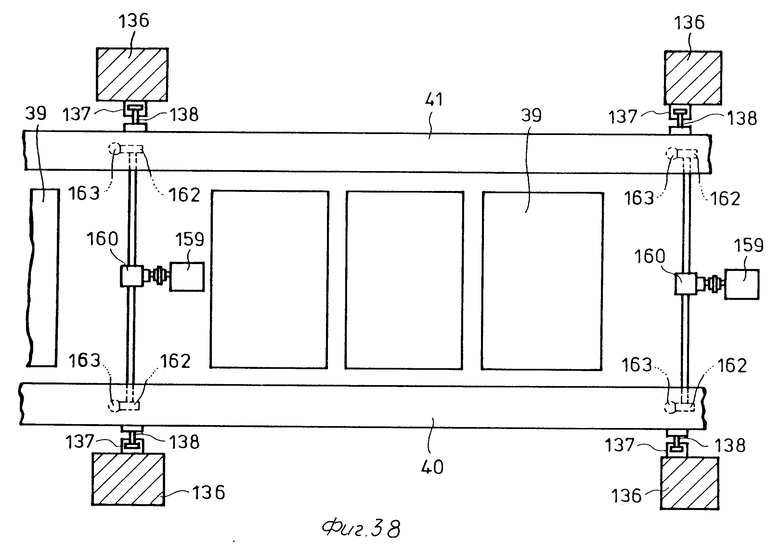
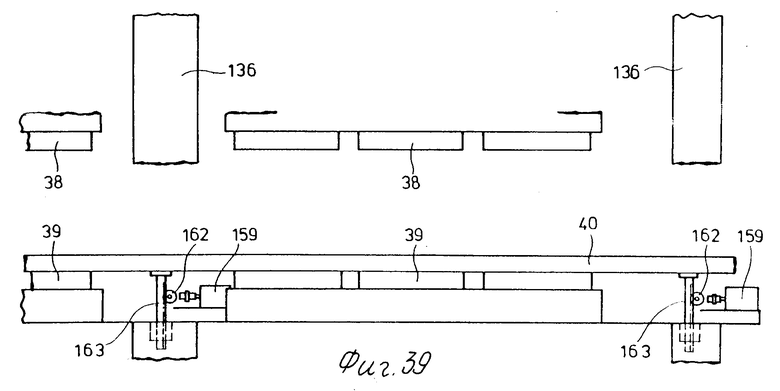
На фиг. 38 и 39 показана вторая модификация пятого варианта, в которой вместо домкратов первой модификации пятого варианта использованы шестерни 162 и вертикально проходящие зубчатые рейки 163, находящиеся в зацеплении с упомянутыми шестернями 162. Шестерня 162 соединена с зубчатой передачей 160, а зубчатая рейка 163 присоединена своим верхним концом к соответствующей направляющей 40 или 41. Вторая модификация также может обеспечить получение таких же результатов и положительных качеств, как и пятый вариант.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОТОЧНАЯ ЛИНИЯ ДЛЯ СБОРКИ ЗВЕНЬЕВ РЕЛЬСОШПАЛЬНОЙ РЕШЕТКИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2008 |
|
RU2373320C1 |
| Грейферное устройство для подачи заготовок в пресс | 1987 |
|
SU1454551A1 |
| Автоматизированный комплекс для штамповки | 1985 |
|
SU1291253A1 |
| УСТРОЙСТВО ТРАНСПОРТИРОВАНИЯ ПАНЕЛИ | 2004 |
|
RU2337049C1 |
| Машина для сборки изоляторов | 1986 |
|
SU1403107A1 |
| ПРЕССОВЫЙ АГРЕГАТ | 1990 |
|
RU2043815C1 |
| СИСТЕМА ДЛЯ ИСПОЛЬЗОВАНИЯ СОВМЕСТНО С ПРЕССОМ ДЛЯ ШТАМПОВКИ ИЗДЕЛИЯ | 1990 |
|
RU2030239C1 |
| УСТРОЙСТВО ДЛЯ ТРАНСПОРТИРОВКИ ПАНЕЛИ | 2004 |
|
RU2336967C2 |
| ПРУЖИНОНАВИВОЧНЫЙ АВТОМАТ, ЕГО МЕХАНИЗМЫ РУБКИ, ОБРАЗОВАНИЯ УЗЛА, ПЕРЕМЕЩЕНИЯ ЗАГОТОВОК (ВАРИАНТЫ), ИХ УСТРОЙСТВА ЗАХВАТОВ, ПОДВИЖКИ, ОРИЕНТАЦИИ, ЗАЖИМА, КУЛАЧКОВЫЕ СРЕДСТВА | 2002 |
|
RU2199412C1 |
| КОНВЕЙЕР ДЛЯ ТРАНСПОРТИРОВКИ ЗАГОТОВОК В ПРЕССЕ | 2004 |
|
RU2355579C2 |
Использование: упрощение конструкции, улучшение динамических эксплуатационных характеристик передаточного устройства и предназначенной для него приводной системы для многопозиционных прессов. Сущность: устройство снабжено тележками и парой продольных направляющих. Тележку перемещают возвратно-поступательно по направляющей, а держатель обрабатываемой заготовки, установленный на тележке, перемещают по вертикали. Приводная система содержит механизм сведения поперечин, подъемное коромысло, подъемные тяги. Механизм сведения поперечин выполнен в виде копирного кулачка, смонтированного на кулачковом валу. 2с. и 2 з.п. ф-лы, 39 ил.
Приоритет по пунктам:
13.11.87 по п.1;
20.12.87 по п.2;
31.10.87 по п.3;
20.11.87 по п.4.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство двукратного усилителя с катодными лампами | 1920 |
|
SU55A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
