Предлагаемое изЪбретение касается манипуляторов для координатографа и представляет собой систему микрометренных винтов Для точной установки планшета в координатографе -приспособлении для точного (до 1/00 л.л) нанесения координат на планшете. Манипулятор состоит из двух симметричных частей: правой, укрепляемой на правой стороне станины координатографа, и левой, укрепляемой на его левой сто1роне. С лево{Гётороны координатографа к планшету прикреплен двумя винтами поперечный микрометренный винт, который связан, в свою очередь, с продольным микрометренным приспособлением. Связь эта осуществляется путем закрепления поперечного микрометра четырьмя винтами игностика R выступу продольного микрометра. С правой стороны коррдинатографа имеется вторая подобная пара.
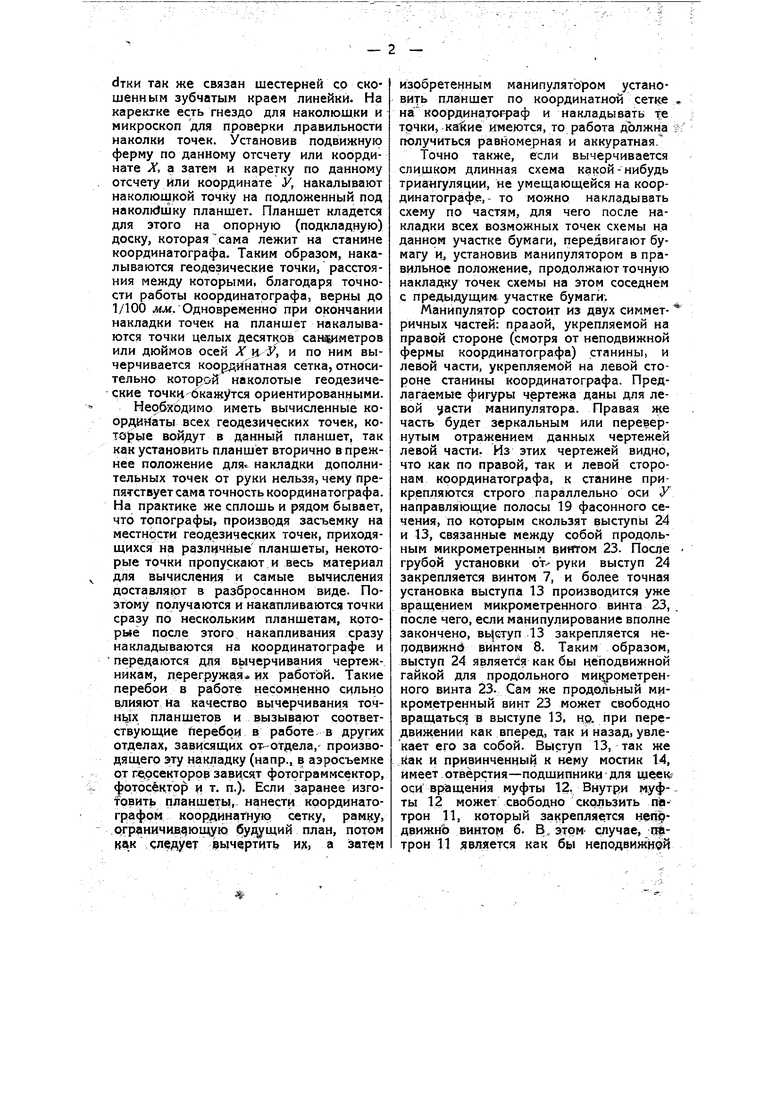
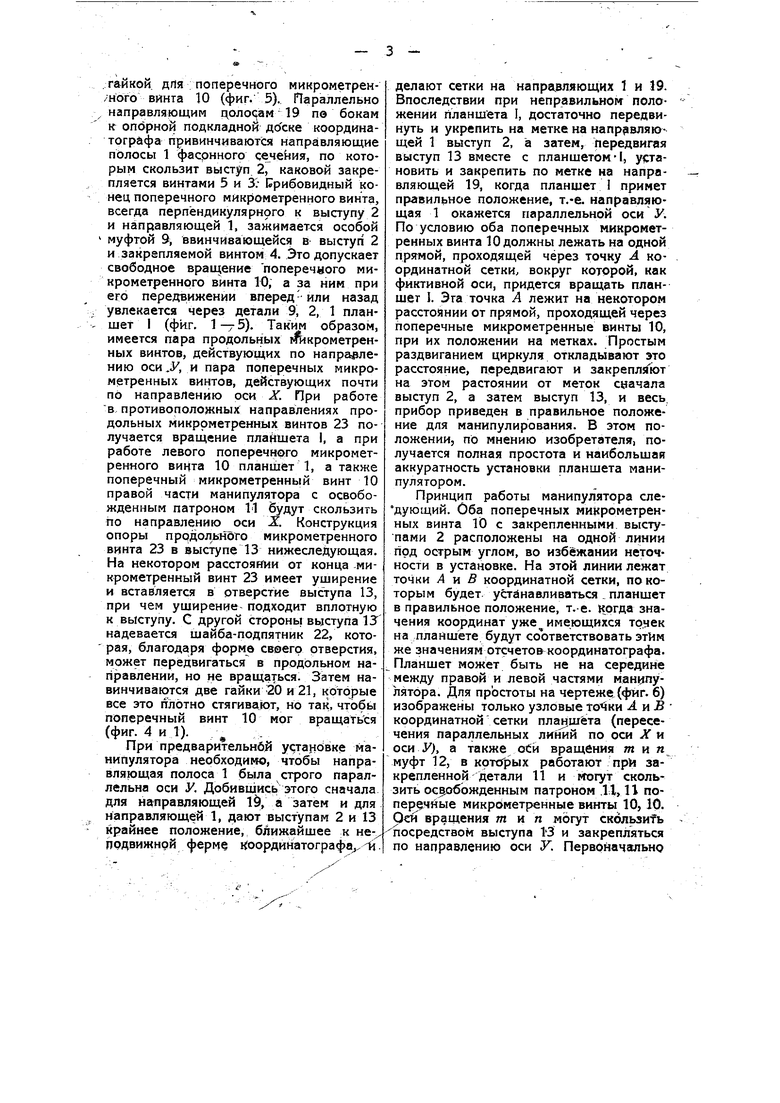
На чертеже фиг. 1 изображает вид сверху лево парь микрометренныхприспособлений; фиг. 2 - вид слева фиг.- I в разрезе по линии CD фиг. 3 -вид справа фиг. I в разрезе по линии KLфиг. 4-вид спереди левой части продольного MHKpoMeTpeijHoro приспособления в разрезе по линии 2УЛ фиг. 1; фиг. 5-поперечный разреэ по линий-4 В фиг: 1, микррмётренного приспособления;-фиг. б-схему установки планшета
по двум точкам на координатографе манипулятором.
Схематически прибор-координатограф, для которого предназначен -изобретенный манипулятор, можно себе представить следующим образом. Чугунная квадратная станина, лежащая на деревянном столе, с одной стороны которой, привинчивается особая длинная неподвижная ферма, на которой имеется точная линейка с сантиметровыми или дюймовыми делениями и со скошенным зубчатым краем. Вдоль этой линейки тянется направляющая выемка-дорожка, по которой катятся колеса одного конца подвижной фермы, перпендикулярной к неподвижной ферме. Другой конец подвижной фермы катится по стальДой. полосе, укрепленной на другой стороне станины координатографа. Со скошенным зубчатым крггем линейки связан шестерней маленький барабанчик с де-. лениями; подвижная ферма передвигается по грубому отсчету на линейке и более точному отсчету на барабанчике, после чего подвижная ферма закрепляется. Неподвижная ферма с линейкой является координатной осью А . Прдвижная ферма является осью У, для чего кр ней также имеется точная линейка с делениями и направляющая дорожка для колес кареткц, скользящей по подвижной ферме. Счетный барабанчик каdiKH так же связан шестерней со скошенным зубчатым краем линейки. На каректке есть гнездо для наколюшки и микроскоп для проверки правильности наколки точек. Установив подвижную ферму по данному отсчету или координате X, а затем и каретку по данному отсчету Или координате У, накалывают наколющкой точку на подложенный под накол1дшку планшет. Планшет кладется для этого на опорную (подкладную) доску, которая сама лежит на станине координатографа. Таким образом, накалываются геодезические точки, расстояния между которыми, благодаря точности работы координатографа, верны до 1/100 . Одновременно при окончании накладки точек на планшет накалываются точки целых десятков сандаметров или дюймов осей X я У, и по ним вычерчивается координатная сетка, относительно которой наколотые геодезические точки-бкажутся ориентированными. Необходимо иметь вычисленные коорд инаты всех геодезических точек, кото ые войдут в данный планшет, так как установить планшет вторично в прежнее положение для. накладки дополнительных точек от руки нельзя, чему препятствует сама точность координатографа. На практике же сплошь и рядом бывает, что топографы, производя засъемку на местности геодезических точек, приходящихся на разлнчньге планшеты, некоторые точки пропускают и весь материал
для вычисления и самые вычисления доставля|рт в разбросанном виде. Поэтому получаются и накат1ливаются точки сразу по нескольким планшетам, которые после этого накапливания сразу накладываются на координатографе и передаются для вычерчивания чертежникам, перегружая их работой. Такие перебои в работе несомненно сильно влияют на качество вычерчивания точнУх планшетов и вызывают соответствующие перебои в работе в других отделах, зависящих от -отдела,- производящего эту накладку (напр.. в аэросъемке от пе,осекторор зависят фотрграммсектор,
фотосёктор и т. п.). Если заранее изготовить планшетм, нанести координатографом координагнук) сетку, рамку, ограничивающую будущий план, потом KIIK следует вычертить их, а затем
изобретенным манипулятором установить планшет по координатной сетке на координатограф и накладывать те трчки, кайие имеются, то работа должна получиться равйомерная и аккуратная.
Точно также, если вычерчивается слищком длинная схема какой-нибудь триангуляции, не умещающейся на координатографе,- то можно накладывать схему по частям, для чего после накладки всех возможных точек схемы Hja данном участке бумаги, передвигают бумагу и, установив манипулятором в правильное положение, продолжают точную накладку точек схемы на этом соседнем с предыдущим участке бумаги;
Манипулятор состоит из двух симметричных частей: правой, укрепляемой на правой стороне (смотря от неподвижной фермы координатографа) станины, и левой части, укрепляемой на левой стороне станины координатографа. Предлагаемые фигуры чертежа даны для левой манипулятора. Правая же часть будет зеркальным или перевернутым отражением данных чертежей левой части. Из этих чертежей видно, что как по правой, так и левой сторонам координатографа, к станине прикрепляются строго параллельно оси У направляющие полосы 19 фасонного сечения, по которым скользят выступы 24 и 13, связанные между собой продольным микрометренным виягом 23. После грубой установки от руки выступ 24 закрепляется винтом 7, и более точная установка выступа 13 производится уже вращением микрометренного винта 23, после чего, если манипулирование вполне закончено, вЦетуп 13 закрепляется неподвижно винтом 8. Таким образом, выступ 24 является как бы неподвижной гайкой для продольного ми1у ометренного винта 23. Сам же продольный микрометренный винт 23 может свободно вращаться в выступе 13, нр, при передвижении как вперед, так и назад, увлекает его за собой. Выступ 13, так же как и привинченны к нему мостик 14, Имеет отверстия-подшипники для щее№ осивращения муфты 12- Внутри муфты 12 может свободно скользить п|1трон 11, который закрепляется нетШ движно винтом 6. В, этом случае, nlтрон П является как бы неподвижней
гайкой дпя поперечного микрометренного Винта 10 (фиг. 5). Параллельно направляющим долос ам 19 по бокам к опорной подкладной доске координатографа привинчиваются направляющие полосы 1 фасонного сечейия, по которым скользит выступ 2, каковой закрепляется винтами 5 и 3; Грибовидный конец поперечного микрометренного винта, всегда перпендикулярного к выступу 2 и направляющей 1, зажимается особой муфтой 9, ввинчивающейся в выступ 2 и закрепляемой винтом 4. Это допускает свободное вращение поперечного микрометренного винта 10, а за ним при его передвижении вперед- или назад увлекается через детали 9, 2, 1 планшет I (фиг. 1-75). Таким образом, имеется пара продольных 1 крометренных винтов, действующих по направлению оси,У, и пара поперечных микрометренных винтов, действующих почти по направлению оси Jf. При работе в противоположных направлениях продольных микррметренных винтов 23 получается вращение планшета I, а при работе левого поперечного микрометренного винта 10 планщет 1, а также поперечный микрометренный винт 10 правой части манипулятора с освобожденным патроном 11 будут скользить по направлению оси X Конструкция опоры пррдольнбго микрометренного винта 23 в выступе 13 нижеследующая. На некотором расстоянии от конца микрометренный винт 23 имеет уширение и вставляется в отверстие выступа 13, при чем уширение подходит вплотную к выступу. С другой сторонь выступа 15 надевается шайба-подпятник 22, которая, благодаря форме своего отверстия, может передвигаться в продольном направлении, но не вращаться. Затем навинчиваются две гайки 20 и 21, которые все это плотно стягива ют, но так, чтобы поперечный винт 10 мог вращаться (фиг. 4 и 1).
При предварительнбй установке манипулятора необходимо, чтобы направляющая полоса 1 была строго параллельна оси У. Добившись этого сначала для направляющей 1, а затем и для направляющей 1, дают выступам 2 и 13 крайнее положение, ближайшее к неподвижной ферме координатографа .
делают сетки на напра,вляющих 1 и 19. Впоследствии при неправильном положении планшета I, достаточно передвинуть и укрепить на метке на напрэвляющей 1 выступ 2, а затем, передвигая выступ 13 вместе с планшетом , установить и закрепить по метке на направляющей 19, когда планшет 1 примет правильное положение, т.-е. направляющая 1 окажется параллельной оси У. По условию оба поперечных микрометренных винта 10 должны лежать на одной прямой, проходящей через точку А координатной сетки, вокруг которой, как фиктивной оси, придется вращать планшет I. Эта точка А лежит на некотором расстоянии от прямой, проходящей через поперечные микрометренные винты 10, при их положении на метках. Простым раздвиганием циркуля откладывают это расстояние, передвигают и закрепляют на этом растоянии от меток сиачала выступ 2, а затем выступ 13, и весь, прибор приведен в правильное положение для манипулирования. В этом положении, по мнению изобретателя, получается полная простота и наибольшая аккуратность установки планшета манипулятором.
Принцип работы манипулятора следующий. Оба поперечных микрометренных винта 10 с закрепленными выступами 2 расположены на одной линии под острым углом, во избежании неточности в установке. На этой линии лежат тоЧки Л и S координатной сетки, по которым будет устанавливаться планшет в правильное положение, т.-е. Яргда значения координат уже имеющихся то.уек на планшете будут соЪтветствовать этим же значениям отсчетов координатографа. Планшет может быть не на середине между правой и левой частями манипулятора. Для простоты на чертеже, (фИг. 6) изображены только узловые А В координатной : сетки (пересечения параллельных лиНий по оси Jf и оси У), а также оСй вращения тип муфт 12, в которых работают при закрепленной детали 11 н могут скользить освобожденным патроном .11,11 попер чйые микр6метр енные вннты 10,10. Оси вращения тип могут скользить
тосредством выступа 13 и закрепляться по направлению оси У. Первоначально
точки л и в лежат на линии mti. Точки ш, и, Л и В, лежат на искомой прямой фиктивной координатной сетки координатографа. Требуется повернуть линию АВ (или, что то же самое, линию т«) так, чтобы и точка В попала на искомую прямую т,п. Как видно из фигуры б, при вращении планшета вокруг точки А точки т VI п переходят в точки mj и щ. Величины этих перемещений определяются:
mwzi :«72i яг/1: Л«.
Так как точка А имеет фиктивную ось вращения, то приходится данного вращения достигать следующими манипуляциями.
Первый прием: точка п служит осью вращения всего планшета, точка т передвигается по прямой У 1/1 левых продольных неподвижных направляющих в положении wij, увлекая за собой весь планшет; так как длина прямой т п при этом меняется, то линия т п при передвижении точки т сдвигается сквозь точку т на какую-то очень малую величину. Второй прием: берут осью вращения планшета точку OTI и закрепляют в ней прямую Trti п. Точка п переходит в положение Пь увлекая за собой весь планшет. Так как длина прямой mi п при этом меняется, то прямая mi п при передвижении точки п сдвигается,,сквозь точку п. Таким образом, направление прямой от п совпадёт с требуемым -направлением mi «1, и обе точки Л и Б лежат на этой прямой. Сдвиг по линии fftj HI 1;1ротивоположен сдвигу по линии mi п; для Л оба сдвига почти уничтожаются. Практически для т т и п П1,измеряемь1Х миллиметрами, расхождение или разность от сдвигов будет измеряться ысячными долями мил лиметров, что не выходит из пределов томности координатографа 1/100 мм. Первоначально точка А устанавливалась до вращения по ее точным значениям ,координат. Линия mi nj я вляется точно параллельной оси X координатографа, как лийия, имеющая переменные координаты Z и коорди рту У const, известная ПО заранее взятым узловым точкам
ко:.рдинатной сетки. Таким образом. после вращения планшета обе точки, Л и В точно стали на свои места, ка координатографе, согласно их значениям координат, а по этим двум точкам ориентирован и приведен в рабочее положение и рамочный планшет для дальнейшей накладки новых точек.
Вместо откладывания величин тт и ппц неудобных на практике, пользуются величиной , измеряемой непосредственно на координатографе микроскопом и известной путем непосредственног® обмера длин: , тА а и АВ с (точка J перед поворачиванием планшета лежит на прямой теj nj). Достаточно определить из этих данных величину перемещения точки А и, сделав перемещен точки А по этой величине, В автоматически передвигают на линию От П1 по ее значению координаты У. Из фиг. б величина А перемещения точки Л в точку AI равнат т, . (I - а). ,
так как
то
Полагая, что
(I - а) . а
,
г:7 Л
получим .k. На основании этого, для быстроты нахождения AI можно составить таблицу отыскания значений А по данному значению Л - величины расхождения координаты У точки В от требуемой (надписанной при точке В}.
Предмет изобретения.
1,Манипулятор для координатографа, отличающийся тем, что, с цеЬью точной установки планшета, применена система из двух пар ми1{рометреннь1Х приспособлений: продольного 26-25-24-23-8-19 и входящего в него чврез выступ 13поперечно 6 27-28-12-11-10-9-2.2.В манипуляторе по п. 1 применение для прикрепления приспособления 27- 28-12-11-10-9-2 к направляющей полосе планшета I винтов 5-3. Ё авторскому свидетельству Н. М. f льянова Н 21459

| название | год | авторы | номер документа |
|---|---|---|---|
| Монокомпаратор | 1982 |
|
SU1057783A1 |
| ПРИБОР ДЛЯ ВЫЧЕРЧИВАНИЯ КООРДИНАТНОЙ СЕТКИ И ДЛЯ НАНЕСЕНИЯ ТОЧЕК НА ПЛАНШЕТЕ | 1927 |
|
SU6544A1 |
| Прибор для графического определения приращений прямоугольных координат | 1932 |
|
SU34767A1 |
| Прибор для составления крупномасштабных топографических планов | 1985 |
|
SU1474468A1 |
| Прибор для интерполирования горизонталей | 1935 |
|
SU47828A1 |
| Прибор для нанесения координат на планах и картах | 1946 |
|
SU70635A1 |
| Координатная линейка | 1930 |
|
SU22281A1 |
| УСТРОЙСТВО ДЛЯ ПОСТРОЕНИЯ СЕТКИ КООРДИНАТ | 2004 |
|
RU2281462C2 |
| Устройство Каушлы К.М. для репозиции костных отломков | 1980 |
|
SU906546A1 |
| Мерная линейка-кипрегель | 1926 |
|
SU4114A1 |

J2
Фиг.2
# IS
ФигЗ.
Л. « ;ffi «
J
фиг4.
.
I 1У
Фиг.З.
12
У K4 jJJ- --VV %jT7
Фигб.

