(54) УСТРОЙСТВО КАУШЛЫ К. М. ДЛЯ РЕПОЗИЦИИ КОСТНЫХ ОТЛОМКОВ
| название | год | авторы | номер документа |
|---|---|---|---|
| Стереотаксический аппарат | 1980 |
|
SU938982A1 |
| Стереотаксический аппарат | 1986 |
|
SU1424827A1 |
| Компрессионно-дистракционный аппарат | 1980 |
|
SU895422A1 |
| СТЕРЖНЕВОЙ КОМПРЕССИОННО-ДИСТРАКЦИОННЫЙ АППАРАТ (СКДА), УЗЕЛ РЕПОЗИЦИИ ДЛЯ СКДА И СРЕДСТВО ДЛЯ ОСЕВОГО ПЕРЕМЕЩЕНИЯ ЧРЕСКОСТНЫХ СТЕРЖНЕЙ СКДА | 1998 |
|
RU2140224C1 |
| АППАРАТ ДЛЯ ЧРЕСКОСТНОГО ОСТЕОСИНТЕЗА | 2000 |
|
RU2177272C1 |
| Модульное устройство для внеочагового остеосинтеза переломов длинных трубчатых костей | 2016 |
|
RU2629325C1 |
| СПОСОБ ПРОЕЦИРОВАНИЯ ПАТОЛОГИЧЕСКОГО ОЧАГА НА КОЖУ | 1990 |
|
RU2033083C1 |
| ФАНТОМ СТЕРЕОТАКСИЧЕСКОГО АППАРАТА | 1994 |
|
RU2108068C1 |
| Стереотаксический аппарат | 1972 |
|
SU441933A1 |
| Чертежный прибор | 1990 |
|
SU1750978A1 |
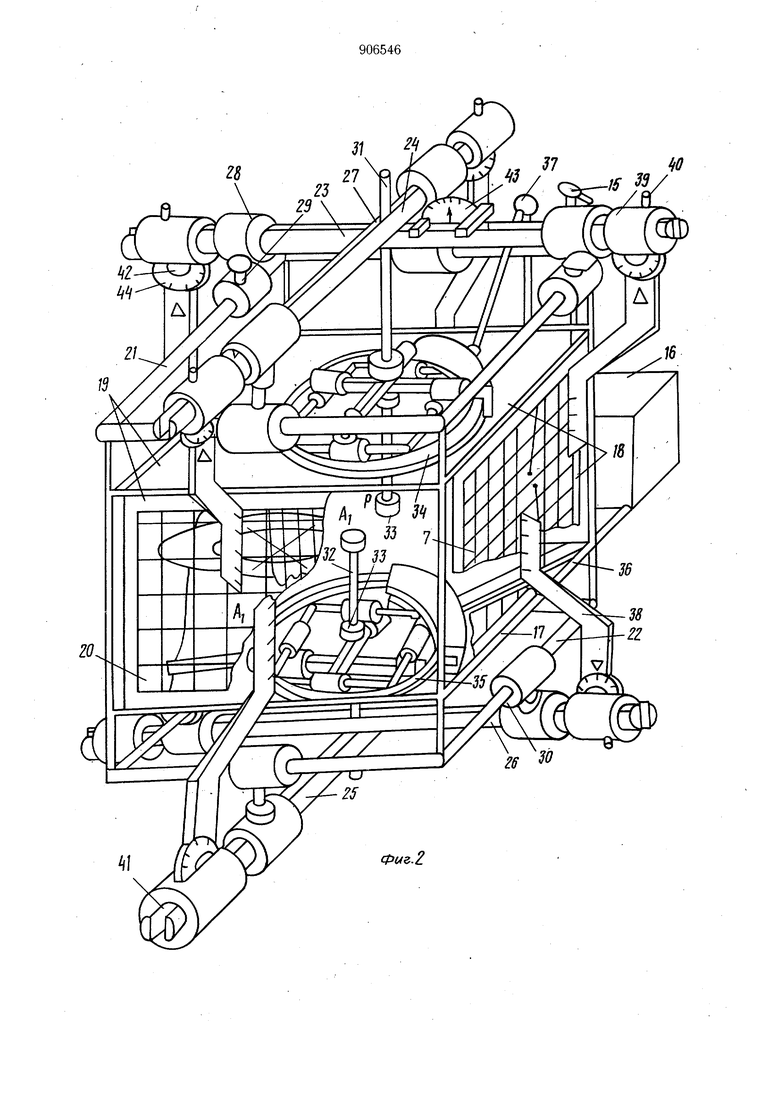

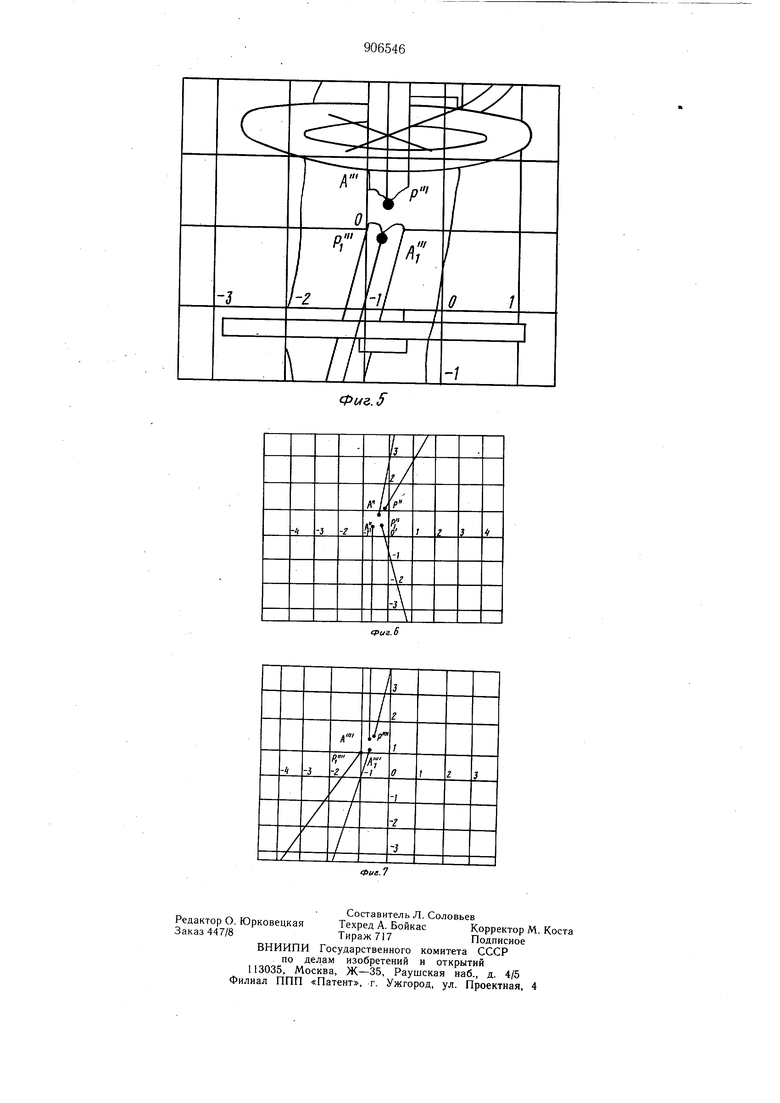
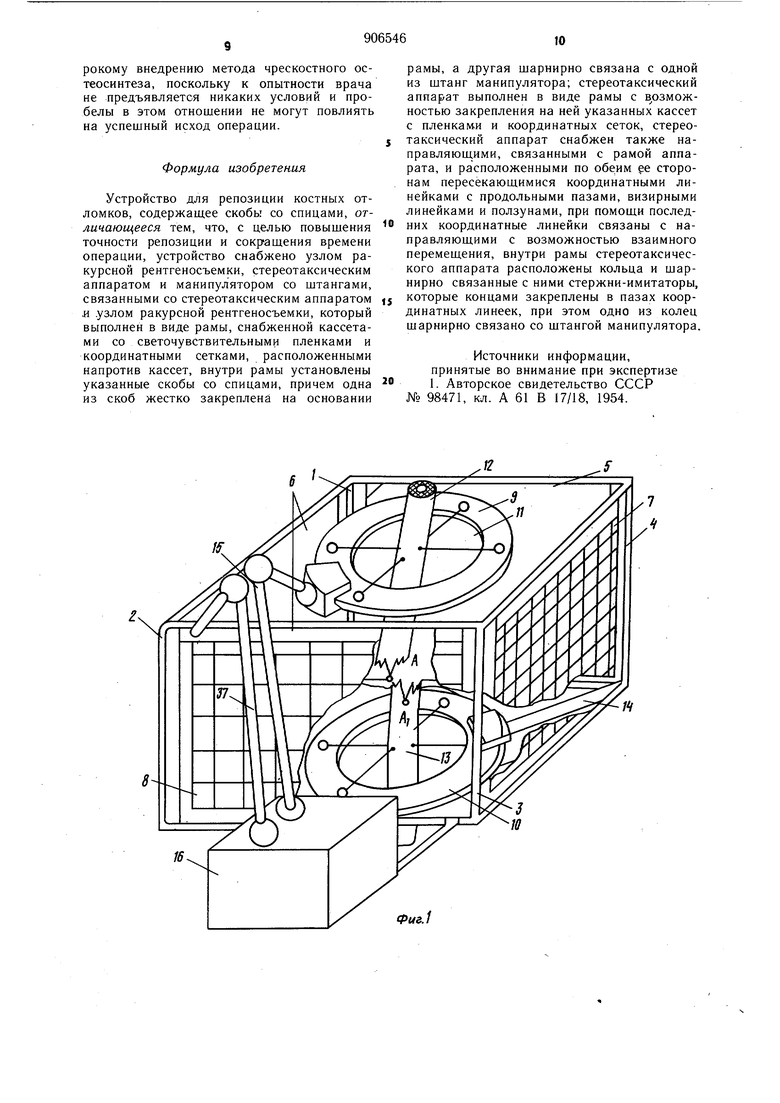
Изобретение относится к медицинской технике, а именно к устройствам для осуществления остеосинтеза. Известно устройство для репозиции костных отломков, которое включает в себя скобы со спицами 1. Однако известное устройство не обеспечивает высокой точности репозиции, а использование рентгеноконтроля затягивает время операции. Цель изобретения - повышение точности репозиции и сокращение времени операции. Поставленная цель достигается тем, что устройство для репозиции костных отломков, содержащее скобы со спицами, снабжено узлом ракурсной рентгеносъемки, стереотаксическим аппаратом и манипулятором со штангами, связанными со стереотаксическим аппаратом и узлом ракурсной рентгеносъемки, который выполнен в виде рамы, снабженной кассетами со светочувствительными пленками и координатными сетками, расположенными напротив кассет, внутри рамы установлены указанные скобы со спицами, причем одна из скоб жестко закреплена на основании рамы, а другая щарнирно связана с одной из штанг манипулятора; стереотаксический аппарат выполнен в виде рамы с возможностью закрепления на ней указанных кассет с пленками и координатных сеток, стереотаксический аппарат снабжен также направляющими, связанными с рамой аппарата, и расположенными по обеим ее сторонам пересекающимися координатными линейками с продольными пазами, визирными линейками и ползунами, при помощи последних координатные линейки связаны с направляющими с возможностью взаимного перемещения, внутри рамы стереотаксического аппарата расположены кольца и шарнирно связанные с ними стержниимитаторы, которые концами закреплены в пазах координатных линеек, при этом одно из колец шарнирно связано со штангой манипулятора. На фиг. 1 изображен узел для ракурсной рентгеносъемки с манипулятором (повторяющим механизмом); на фиг. 2 - стереотаксический аппарат с тем же манипулятором; на фиг. 3 - планшет, используемый для расчета длины перемещений стержней-имитаторов отломков; на фиг. 4 и 5 - рентгеноснимки с травмированной конечности с осевыми 11 периферийными стыковочными точками, осевыми линиями и линиями подхода; на (|)пг. 6 и 7 -- соответствующие координатные сетки с осевыми и периферийнымистановочны.ми точками, осевыми линиями и линиями подхода, перенесенные с соответствующих рентгенограмм.
Устройство состоит из узла для ракурсной рентгеносъемки травмированной конечности, манипулятора и стереотаксического аппарата. Узел для ракурсной рентгеносъемки (фиг. 1) состоит из рамы с четырьмя стойками 1-4, накоторой .жестко закреплены держатели 5 и 6. На держателях 5 устанавливают коордн-натные сетки 7 и на противоположных им держателях 6 закрепляют во время рентгеносъемки кассеты 8 со светочувствительными пленками. Внутри рамы расположены скобы в виде колец 9 и 10, жестко соединенные с помощью спиц 11 с отломками 12 и 13 поврежденной конечности. Причем кольцо 10 жестко соединено с основанием рамы посредством держателя 14, а кольцо 9 - шарнирно со штангой 15 манипулятора (повторяющего механизма), корпус 16 которого также жестко соединен с рамой узла для ракурсной съемки.
Стереотаксический аппарат (фиг. 2) представляет собой раму 17, на которой жестко закреплены держатели 18 и 19. На держателях 18 устанавливают координатные сетки 7, а на противоположных им держателях 19 закрепляют после проявления рентгеновские снимки 20. На раме 17 закреплены верхние и нижние направляющие 21 и 22. .ia 17, держатели 18 и 19, верхние и нижние направляющие 21 и 22 являются неподвижной частью координатно-механической системы аппарата. Подвижная часть координатно-механической системы состоит из двух верхних координатных линеек 23 и 24 и двух нижних координатных линеек 25 и 26 со сквозными продольными пазами 27. Каждая пара верхних и нижних линеек соединены через горизонтальные и вертикальные шарниры 28 и 29 с ползунами 30, имеющими возможность перемещения по своим направляющим 21 и 22. В продольных пазах 27 верхней и нижней пар. координатных линеек установлены стержни-имитаторы 31 и 32 отломков кости, закрепляемые посредством фиксаторов 33 в кольцах 34 и 35, идентичных кольцам 9 . Но в отличии от кольца 9 (или 10) в кольце 34 (или 35) разменлена, например, координатно-механическая система, выполненная по аналогии с координатно-механической системой стереотаксического аппарата, т. е. состоящая из четырех направляющих, жестко соединенных о кольцом, на которых установлены с возможностьк 11С|)емсщения ползуны, щарнирно связанные с двумя перекрещивающимися координатными .шпейками со сквозными
продольными пазами, позволяющая устанавливать стержень-имитатор 31 (или стержень-имитатор 32 по отношению к кольцу 35) В любое пространственное положение относительно кольца 34 и затем закреплять
его в этом положении посредством фиксатора 33, фиксирующего как координатномеханическую систему кольца 34, так и сам стержень-имитатор 31.
Кольцо 35 нижнего стержня-имитатора 32 жестко связано с рамой 17 посредством держателя 36, а, держатель верхнего стержня-имитатора 31 - с ответной щтангой 37 манипулятора, корпус 16 которого жестко соединен с рамой 17 стереотаксического аппарата.
На концах всех координатных линеек жестко в радиальном и свободно в продольном направлении закреплены визирные линейки 38, установленные в плоскости продольного Т1аза. Жесткость в радиальном и свобода в продольном направлении линеек
0 обеспечивается ползунами 39, щтифты 40 которых перемещаются в пазах 41 координатных линеек. К ползунам 39 визирные линейки присоединены посредством горизонтального шарнира 42, что обеспечивает
5 плотное поджатие визирных линеек к плоскости снимков 20 и координатных сеток 7 даже в случае, когда плоскость их расположения не перпендикулярна плоскости расположения направляющих 21 и 22.
Аппарат комплектуется угломером 43 любого известного типа, позволяющим определить угол поворота координатных линеек 23 и 24, 25 и 26 относительно друг друга. Для контроля положения элементов подвижной координатно-механической системы
5 стереотаксического аппарата координатные линейки 23-26 и визирные линейки 38 снабжены отсчетными делениями, а щарниры 42 - отсчетными щкалами 44, а для определения углового положения координатных линеек относительно друг друга используется угломер 43.
Плоский планщет (фиг. 3) служит для точной пространственной ориентации стержней-имитаторов 31 и 32 (величины их выдвижения навстречу друг другу). Он состоит
5 из направляющей 45, на которой установлены с возможностью продольного перемещения два ползуна 46 и 47. Ползун 48 закреплен на направляющей 45 жестко. Средний ползун 47 щарнирно соединен с линейкой 49, а два крайних - щарнирно соединены с направляющими 50 и 51. На направляющих 50 и 51 установлены с возможностью продольного перемещения ползуны 52 и 53, они соединены между собой упругой нитью 54.
5 Для контроля положения подвижных элементов плоского планщета направляющие 45. 50 и 51 и линейка 49 снабжены отсчетными делениями, а шарниры крепления направляющих 50 и 51, линейки 49 и ползунов 46-48 снабжены отсчетными шкалами. Для удобства работы со стереотаксическим аппаратом все ползуны и шарниры подвижной части координатно-механической системы и плоского планшета снабжены фиксаторами (не показаны), а координатные линейки выполнены съемными. Если плоскости расположения снимков 20 и координатных сеток 7 перпендикулярны плоскости расположения направляющих 21 и 22, то визирные линейки 38 в любом положении перпендикулярны координатным линейкам 23-26, и отпадает необходимость использования шарниров 42 и шкал 44 при присоединении визирных линеек 38 к коордилатным линейкам, их крепление осуществляется жестко к ползунам 39 перпендикулярно соответствующим координатным линейкам. При этом на планшете присоединение направляющих 50 и 51 к ползунам 46 и 48 осуществляется жестко перпендикулярно направляющей 45. Репозиция отломков при чрескостном остеосинтезе с помощью устройства осуществляется следующим образом. После необходимой обработки травмированной конечности и закрепления известным способом посредством спиц 11 отломков Г2 и 13 кости на соответствующих кольцах 9 и 10, ее помещают в узел для ракурсной рентгеносъемки, закрепляя при этом верхнее кольцо 9 на штанге 15 манипулятора (повторяющего механизма), а нижнее кольцо 10 жестко соединяют посредством держателя.14 с рамой узла ракурсной рентгеносъемки, который также жестко соединяют с корпусом 16 манипулятора и затормаживают (фиксируют) штанги 15 и 37 манипулятора (повторяющего механизма). После чего на держателях 5 закрепляют координатные сетки 7, а на противоположных держателях 6 закрепляют кассеты 8 с рентгенопленками. Затем производят ракурсную рентгеносъемку травмируемой конечности со стороны координатных сеток 7. Для репонирования в осевом продольном и боковом направлениях на снятых и проявленных снимках 20 (фиг. 4 и 5) отмечают осевые А и периферийные Р стыковочные точки отломков и проводят через них линии подхода (через периферийную стыковочную точку в произвольном направлении) .и осевые линии (через осевую стыковочную точку). Осевые линии отломков - оптимальные линии, совмещением которых обеспечивается наилучшая репозиция отломков. Например, на фиг. 4 осевые стыковочные точки А и Aj, осевые линии проведенные через них, периферийные .сты- ковочные точки Р и Р,, линии подхода к ним, проведенные в произвольном направлении, а на фиг. 5 - осевые стыковочные точки А и Aj , осевые линии, проведенные через них. и периферийные стыковочные точки Р и Pf и линии подхода к ним, проведенные в произвольном направлении. Стыковочные точки, осевые линии и линии подхода переносят на соответствующие координатные сетки 7, получив при этом на координатной сетке 7, соответствующей левой рентгенограмме -(фиг. 6), точки А и А,, осевые линии проведены через них, и периферийные стыковочные точки Р и Р, и линии подхода к ним, а на координатной сетке, соответствующей передней рентгенограмме (фиг. 7), точки А и AJ , осевые линии, проведенные через них, и периферийные стыковочные точки Р и Pf и линии подхода к ним. После этого снимки 20 закрепляют на соответствующих держателях 19 стереотаксического аппарата, а координатные сетки 7 на соответствующих взаимопротивоположнщх держателях 18 этого же аппарата в положения, точно соответствующие положению кассет 8 с рентгенопленками и координатных сеток 7 во время рентгеносъемки на узле ракурсной рентгеносъемки. После установки на держателях 18 и 19 снимков 20 и координатных сеток 7 производят совмещение с осевыми линиями на рентгенограммах и координатных сетках 7 визирных линеек 38. Причем визирные линейки 38 нижних координатных линеек 25 и 26 совмещаются с осевыми линиями и осевыми стыковочными точками нижних отломков 13, а визирные линейки 38 верхних координатных линеек 23 и 24 совмещаются с осевыми линиями и осевыми стыковочными .точками верхних отломков 12 как на рентгеноснимках, так и на соответствующих им координатных сетках 7. После совмещения.визирных линеек 38 с осевыми линиями координатные линейки 23, 24 и 25, 26 получают такую ориентацию, что стержни-имитаторы 31 и 32, вставленные в сквозные пазы 27 этих линеек, получают такую же пространственную направленность как и отломки кости, которые они имитируют. После чего все щарниры, ползуны и линейки стереотаксического аппарата фиксируют. Затем определяют величину выдвижения стержней-имитаторов 31 и 32 навстречу друг другу. Так, для определения величины выдвижения стержня-имитатора 31, например, от верхней кромки сквозного паза 27 координатной линейки 23, выбирают любую из плоскостей, образуемых координатной линейкой 23 или 24 и укрепленными на ее концах визирными линейками 38. Данные, снятые с координатной линейки 23, ее визирных линеек 38, шкал 44 и шкалы угломера 43 переносятся на плоский планшет (фиг. 3). Величина ВС, снятая с координатной линейки 23 как расстояние между точкой В (точкой пересечения плоскости расположения рентгеноснимка на держателе 19 с координатной линейкой 23) и точкой С (точкой пересечения плоскости расположения координатной сетки 7 на держателе 18 с этой же координатной линейкой 23), определяет расстояние между крайними ползунами 46 и 48 плоского планшета. Величина ВО, снятая с координатной линейки 23 как расстояние между точкой В и точкой О (точкой пересечения координатных линеек 23 и 24), определяет расстояние между левым ползуном 46 и средним ползуном 47 плоского планшета. Левая направляюш,ая 50 плоского планшета поворачивается в соответствии с углом поворота левой верхней визирной линейки 38, снятым со шкалы 44. Правая направляюш,ая 51 поворачивается в соответствии с углом поворота правой верхней визирной линейки 38, снятым со шкалы 44. Если плоскости рентгеноснимков и координатных линеек перпендикулярны плоскостям расположения направляюших 21 W 22, то визирные линейки 38 перпендикулярны координатным линейкам 23 и 24, 25 и 26 при любом их положении. Следовательно, направляюш.ие 51 и 50 плоского планшета постоянно устанавливаются перпендикулярно направляюшей 45. Величина АВ, снятая с левой верхней визирной линейки 38 как расстояние между изображением осевой стыковочной точки на рентгеноснимке, расположенном на левом боковом держателе 19, и точкой В, определяет расстояние от ползуна 46 до ползуна 52. Величина , снятая с правой визирной линейки 38 как расстояние между проекцией характерной стыковочной точки (по рентгеновскому лучу) на координатную сетку 7, расположенную на правом боковом держателе 18, и точкой С, определяет: расстояние от ползуна 48 до ползуна 53. Линейкц 49 поворачивается в соответствии с углом поворота стержня-имитатора 31 по отношению к координатной линейке 23 (угол АОС, лежаш.ий в плоскости АВСА), т. е. углом, снятым со шкалы угломера 43 этой координатной линейки 23. Все линейные перемещения ползунов 46, 47, 52 и 53 отсчитываются по отсчетным делениям, нанесенным/на направляюш,ие 45, 50 и 51 и линейку 49. Все угловые перемещения направляющих 50 и 51 и линейки 49 по отношению к направляющей 45 отсчитываются по шкалам. Расстояние ОА, как величина выдвижения стержня-имитатора 31, отсчитываемая, например, от верхней кромки сквозного паза 27 координатной линейки 23, снимается с линейки 49 от точки О (начало линейки 49) до точки А (точки пересечения линейки 49 с упругой нитью 54, соединяющей ползуны 52 и 53). При пространственном ориентировании стержня-имитатора 31 с помощью верхней координатно-механической системы стереотаксического аппарата он свободно перемещается и перемещает координатно-механическую систему верхнего кольца 34, жестко закрепленного на штанге 37 манипулятора (повторяющего механизма). После пространственной ориентации и выдвижения стержня-имитатора 31 на величину ОА последний закрепляется посредством фиксатора 33, обеспечивающего торможение координатно-механической системы кольца и жесткую фиксацию стержняимитатора 31 по отношению к кольцу 34. Аналогичным образом определяют величину выдвижения нижнего стержня-имитатора 32., который после выдвижения жестко закрепляется посредством фиксатора 33 в кольце 35 При этом оба стержня-имитатора 31 и 32, закрепленные соответственно в кольцах 34 и 35, получают такую же пространственную ориентацию, как и отломкиЧ2 и 13, которые они им-итируют. Для возможности точного ротационного репонирования отломков 12 и 13 на стержниимитаторы 31 и 32 на основании информации, снятой с рентгенограммы и координатных сеток, наносятся периферийные стыковочные точки Р и Р . Определение пространственного положения периферийных стыковочных точек производится посредством стереотаксического аппарата и стержней-указателей (не показаны), вставляемых в продольные пазы 27 координатных линеек стереотаксического аппарата на место зафиксированных в кольцах 34 и 35 и пространственно ориентированных стержней-имитаторов 31 и 32 способом, аналогичным описанному (при определении пространственной ориентации стержней). После определения пространственногоположения периферийных стыковочных точек Р и Р последние наносятся на стержни-имитаторы 31 и 32, например, в виде цветных меток. Затем снимают (или растормаживают) верхние координатные линейки 23 и 24 стереотаксического аппарата, растормаживают штанги 15 и 37 манипулятора (повторяющего механизма) и начинают стыковать стержни-имитаторы 31 и 32 так, чтобы соединились их конць и все стыковочные точки совпали в продольном, боковом, осевом и ротационном направлениях. Движение стержня-имитатора 31 через верхнее кольцо 34, в котором он закреплен, передается на штангу 37 манипулятора, а штанга 15 этого манипулятора, повторяя движение штанги 37, перемещает кольцо 9 с закрепленным на нем посредством спиц 11 отломком 12 таким образом, что при стыковке стержнейимитаторов 31 и 32 одновременно производится стыковка (репозиция) отломков 12 и 13 кости травмированной конечности в боковом, осевом и ротационном направлениях. Использование устройства обеспечивает высокую точность репозиции, позволяет сократить рентгенооблучение пациента, сократить время проведения операции наложения аппарата, а также способствует широкому внедрению метода чрескостного остеосинтеза, поскольку к опытности врача не предъявляется никаких условий и пробелы в этом отношении не могут повлиять на успешный исход операции. Формула изобретения Устройство для репозиции костных отломков, содержаш.ее скобы со спицами, отличающееся тем, что, с целью повышения точности репозиции и сокращения времени операции, устройство снабжено узлом ракурсной рентгеносъемки, стереотаксическим аппаратом и манипулятором со штангами, связанными со стереотаксическим аппаратом л .узлом ракурсной рентгеносъемки, который выполнен в виде рамы, снабженной кассетами со светочувствительными пленками и координатными сетками, расположенными напротив кассет, внутри рамы установлены указанные скобы со спицами, причем одна из скоб жестко закреплена на основании рамы, а другая шарнирно связана с одной из штанг манипулятора; стереотаксический аппарат выполнен в виде рамы с в озможностью закрепления на ней указанных кассет с пленками и координатных сеток, стереотаксический аппарат снабжен также направляющими, связанными с рамой аппарата, и расположенными по обеим ge сторонам пересекающимися координатными линейками с продольными пазами, визирными линейками и ползунами, при помощи последних координатные линейки связаны с направляющими с возможностью взаимного перемещения, внутри рамы стереотаксического аппарата расположены кольца и шарнирно связанные с ними стержни-имитаторы, которые концами закреплены в пазах координатных линеек, при этом одно из колец шарнирно связано со штангой манипулятора. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 98471, кл. А 61 В 17/18, 1954.
Фие.2 1 I I I ГП I I TT I .1
-4
iL
-4
fi:
и
