Известны стенды для исследования функций вестибулярного аппарата, содержащие вращающиеся на осях основную и вспомогательную платформы и кресло.
Предлагаемый стенд отличается от известных тем, что в нем ось кресла установлена на периферии вспомогательной вращающейся платформы, ось которой расположена на периферии основной вращающейся платформы. Расстояния от оси кресла до оси вспомогательной платформы и между осями обеих платформ равны. Вспомогательная платформа оснащена шестеренчатой передачей, а кресло снабжено устройством жесткой фиксации к вспомогательной платформе, которая содержит устройство, жестко фиксирующее ее относительно основной платформы. На кресле закреплен гибкий трос, дистальный конец которого соединен с подвижными контактами коллекторного устройства.
Такое выполнение стенда обеспечивает получение одновременно или раздельно линейной или угловой скорости и ускорения, действующих в горизонтальной плоскости; прямолинейного или мгновенно поступательного движения и линейных ускорений; переменного характера действующих на испытуемого возмущений; уменьщения помех при передаче исследуемых параметров к стационарным объектам.
При горизонтальном расположении осей вращения платформ и кресла, если эти оси соединены с валами двигателей, можно получать возмущения, действующие в вертикальной плоскости.
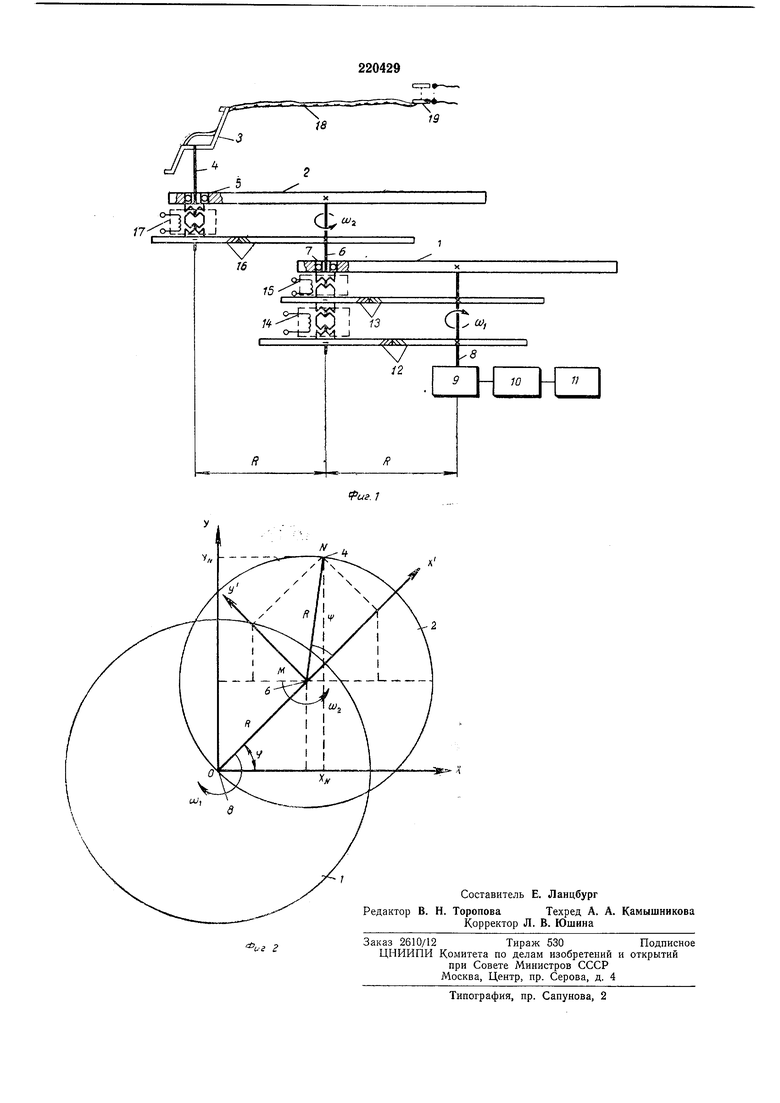
Па фиг. 1 изображена кинематическая схема предлагаемого стенда; на фиг. 2 - системы координат, используемые для математического описания движения кресла.
Предлагаемый стенд содержит основную I и вспомогательную 2 платформы и кресло 3 для испытуемого. Кресло установлено на оси 4, закрепленной в подщипнике 5, расположенном на периферии вспомогательной платформы 2.
Ось 6 платформы 2 закреплена в подшипнике 7, установленном на периферии платформы /. Расстояние между осью 4 и осью 6 равно расстоянию между осью 6 и осью S
платформы /.
Платформа / получает вращение через редуктор 9 от двигателя 10, закон движениут которого задается с пульта управления //.
На платформу 2 вращение передается с помощью шестеренчатых передач 12 и 13, имеющих передаточное отношение соответственно 1:1 и 1:2. Переключение с одной передачи на другую осуществляется электромагнитной
Посредством электромагнитной муфты 5 можно (при отключении муфты 14) жестко закреплять в любом положении платформу 2 по отношению к платформе 1.
Вращение на кресло передается с оси 6 платформы 2 с помощью шестеренчатой передачи 16, имеющей- передаточное отношение 2:1. Посредством электромагнитной муфты 17 ось. кресла можно жестко фиксировать к платформе 2. (Кроме того предусмотрены механические фиксаторы).
Для снятия биопотенциалов, характеризующих поведение испытуемого организма, предусмотрен гибкий трос 18, одним концом прикрепленный к креслу, а другим - к подвижным контактам коллекторного устройства 19, к которому кренятся провода, отводящие биопотенциалы.
Нетрудно получить закон движения испытуемого, выраженный в координатной форме (см. фиг. 2).
Пусть начало неподвижной системы координат (х, у) - точка О - соответствует оси S платформы 1, а начало подвижной системы координат (х , у ) - точка М - соответствует оси 6 платформы 2. Точка Л соответствует оси 4 кресла. Тогда OA1 MN. Вращение платформы 1 относительно своей оси 8 пусть происходит с угловой скоростью 0)1, а вращение платформы 2 относительно своей оси 6 - с угловой скоростью С02. Тогда, если ф - угол поворота платформы /, а г|) - угол поворота платформы 2 вокруг своей оси, то координаты точки Л в неподвижной системе отсчета таковы:
AA созф-}-соз(г|)+ф), з1пф4--51п(г1з-|-ф).
Уравнения (1) определяют закон движения оси 4 кресла при произвольных скоростях вращения платформ.
Когда скорости вращения платформ равны и противоположны, а ось кресла жестко закреплена на платформе 2, т. е. )2 , получаем:
для равномерных вращений
(f(i)t, г|) -0г; для равноускоренных вращений
efg , Bfl
V- . где е - угловое ускорение.
Следовательно, из уравнений (1) при равномерных вращениях следует закон движения оси кресла
X jy (cOS(U/-f 1),
Уff R sinwi,
Уравнение траектории движения закрепленного кресла в этом случае будет иметь внд
(X:,-R) + ,
то есть все точки тела, находящегося на оси 4, проходящей через точку /V, движутся по окружности с центром, расположенным на оси х и отстоящим от центра платформы /
на величину R, равную расстоянию между осями платформ.
Если на предлагаемом стенде, при равенстве расстояний между осями 6 н 8 вращения платформ 1 и 2 и осями 4 и 6, обеспечить противоположные скорости вращении с такой величиной, чтобы относительная скорость вращения платформы 2 была в два раза больше, чем скорость вращения платформы /, т. е. при равномерных вращениях
q) (o/; г|: -2cflt
а при равноускоренных вращениях
(2)
TO из уравнений (1) получается: для равномерных вращений
XN 2R coscut У л- 0, ДЛЯ равноускоренных вращений
Xf, 2Rcos(,. (3)
При данных условиях траекторией движения испытуемого в кресле (ось которого находится в точке N) будет прямая, а величина линейного ускорения адалин , действующего на испытуемого, по величине изменяется по следующим законам: для равномерных вращений
ауулин -2/ cosu)(4)
и соответственно для равноускоренного движения
. (5)
(П
2.
- 2 / (s
COS-- + ssin --
Абсолютное движение тела, расположенного на оси в точке Л, в этом случае будет
мгновенным вращением с угловой скоростью а А w-2w -w вокруг мгновенной оси, параллельной данной и проходящей через точку Л. В этом случае, кроме линейного ускорения ajyaati , благодаря вращению на тело
воздействует также вращающее ускорение, нормальная и тангенциальная составляющие которого определяются соответственно выражениями:
.
(6)
Для компенсации вращения испытуемого вокруг своей оси кресло должно совершать вращение вокруг своей оси со скоростью, равной скорости вращения платформы / в ту же сторону, что и эта платформа.
Движение по ирямой линии получается при равенстве расстояний от оси 8 до оси 6 и or оси 6 до оси 4, при обеспечении скоростей вращения платформы / и кресла, равных coi и одинаково направленных, скорости юа вращения платформы 2, равной удвоенному значению скорости вращения платформы / и противоположно направленной, т. е. «2 -2(0i. При этом испытуемый подвергается линейному ускорению, величина которого определяется уравнениями (4) и (5).
При соблюдении равенства скорости вращения платформы 2 удвоенной и противоположно направленной скорости вращения платформы / и равенства расстояний между осями 4, 6 и 5 и жесткой фиксации посредством электромагнитной муфты 17 оси 4 кресла 3 к платформе 2 получается движение испытуемого по прямой линии с одновременным вращением вокруг своей оси. При этом испытуемый подвергается линейному ускорению, величина которого определяется из уравнений (4) и (5), и одновременно вращательному ускорению, нормальная и тангенциальная составляющие которого определяются уравнением (6).
При соблюдении равенства угловых скоростей платформ / и 2 и противоположного их направления, т. е. (BI -(02 (что можно обеспечить изменением передаточного числа редуктора, связывающего ось платформы У с осью платформы 2 посредством переключающей электромагнитной муфты 14), и жестком закреплении оси 4 кресла 3 на платформе 2, получается мгновенное поступательное движение испытуемого по окружности.
При установке платформы 2 так, чтобы ось 4 кресла совпадала с осью платформы 1, и жесткой фиксации соответственно кресла 3 к платформе 2 и платформы 2 к платформе 1 получается обычное вращение испытуемого вокруг своей осн..
Наконец, при жестком закреплении платформы / к платформе 2, на которой также жестко закреплено кресло, получается двил ение вращения испытуемого при эксцентричном его положении, т. е. центрифуга. Радиус центрифуги может изменяться от О до 2R.
При вертикальном расположении платформ можно получигь вертикальные ускорения, равные и даже большие ускорепия свободного падения.
Предмет изобретения
1.Стенд для исследования функций вестибулярного аппарата, содерлсащий вращающиеся на осях основную и вспомогательную платформы и кресло, отличающийся тем, что, с целью получения одновременно или раздельно линейной или угловой скорости и ускорения, действующих в горизонтальной плоскости, ось кресла установлена на периферии вспомогательной вращающейся платформы, ось которой расположена на периферии основной вращающейся платформы.
2.Стенд по п. 1, отличающийся тем, что, с целью получения прямолинейного или мгновенно поступательного и линейных ускорений, оси кресла и вспомогательной платформы, а также оси платформ установлены на равных расстояниях, вспомогательная платформа оснащена шестеренчатой передачей, а кресло снабл ено устройством жесткой фиксации к вспомогательной платформе, которая содержит устройство, жестко фиксирующее ее относительно основной платформы.
3.Стенд по пп. 1 и 2, отличающийся тем, что, с целью уменьшения помех при передаче исследуемых параметров к стационарным объектам, применен гибкий трос, дистальный конец которого соединен с подвил ными контактами коллекторного устройства.
4.Стенд по пп. 1-3, отличающийся тем, что, с целью получения возмущений, действующих в вертикальной плоскости, а таклсе регулирования различных возмущающих воздействий, оси вращен 1я платформ и кресла распололчены горизонтально и соединены с валами двигателей.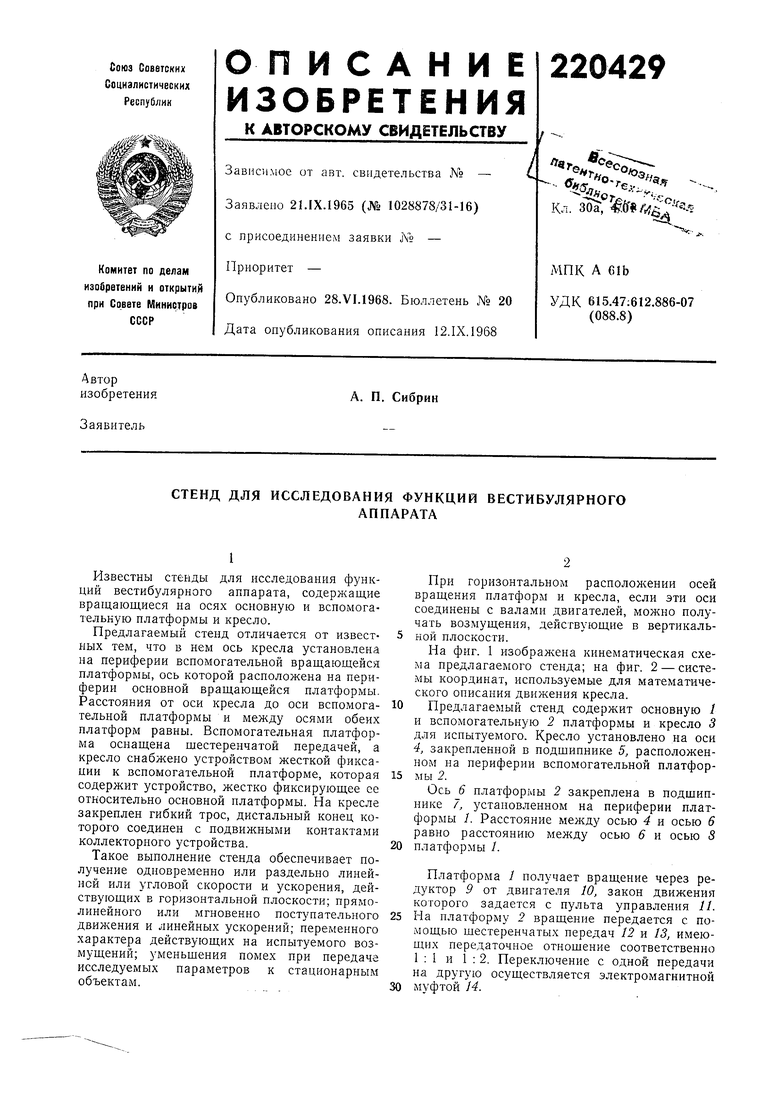
| название | год | авторы | номер документа |
|---|---|---|---|
| Стенд для исследования вистибулярного анализатора | 1982 |
|
SU1050665A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЕНЗОРА ИНЕРЦИИ И КООРДИНАТ ЦЕНТРА МАСС ТЕЛА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2348020C1 |
| Стенд для испытания изделий на комплексное динамическое воздействие | 1980 |
|
SU920428A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЕНЗОРА ИНЕРЦИИ ТЕЛА | 2002 |
|
RU2262678C2 |
| СТЕНД ДЛЯ ИСПЫТАНИЯ ИЗДЕЛИЙ НА ВОЗДЕЙСТВИЕ ИМПУЛЬСНЫХ УСКОРЕНИЙ | 1987 |
|
SU1840351A1 |
| Стенд угловых ускорений | 1976 |
|
SU591778A1 |
| Стенд для градуировки и испытаний акселерометров | 1981 |
|
SU1000920A1 |
| Стенд для динамических испытаний изделий на воздействие переменных ускорений | 1990 |
|
SU1720025A1 |
| Стенд для испытания изделий на воздействие импульса ускорения | 1990 |
|
SU1742662A1 |
| Имитационный стенд линейных ускорений | 1990 |
|
SU1720024A1 |