Изобретение относится к машиностроению и может быть использовано для определения осевых моментов инерции и тензоров инерции тел на устройствах, осуществляющих программное вращательное движения с в условиях трения в ограниченном угловом интервале, при этом по полученным экспериментальным данным одновременно определяются и положения дентров масс тел.
Известен способ определения момента инерции тела (авт. св. СССР №1415090 МПК G 01 М 1/10, дата приоритета 12.05.86, опублик. 07.08.88. Бюл. №29), при котором тело устанавливают на платформу с горизонтальной осью вращения и с известным дисбалансным механизмом, сообщают ей движение в виде свободных угловых колебаний в окрестности положения равновесия, измеряют мгновенные угловые скорости в определенных угловых положениях за три четверти полного колебания, изменяют на известную величину значение дисбаланса, повторно измеряют мгновенные угловые скорости, по которым аналитически определяют момент инерции тела. По шести моментам инерции тела, определенных по этому способу относительно шести разнонаправленных осей пересекающихся в точке, известным образом аналитически определяют тензор инерции тела в точке пересечения осей. Недостатком этого способа является невысокая точность и производительность, обусловленная пренебрежением или неточным учетом сил трения, неточным определением положения равновесия системы в условиях трения, от которого отсчитывается движение, затратой времени на определение положения равновесия и на перенастройку дисбалансного механизма перед повторным опытом, а также к недостаткам относится неизбежно большая инерционность применяемого механического маятникового дисбалансного механизма и необходимость предварительного взведения этого механизма перед каждым испытанием вручную или дополнительным приводом.
Известен способ определения осевого момента инерции тела и тензора инерции тела. (Патент РФ №2115904 МПК G 01 М 1/10, дата приоритета 28.04.95, опублик. 20.07.98 Бюл. №20), при котором в условиях трения платформе с телом с произвольно направленной осью вращения сообщают динамически несимметричное разгонно-тормозное вращательное движение в одном направлении, достигаемое приложением скачкообразно изменяющегося разгонно-тормозного момента любой физической природы и скачкообразным изменением приведенного момента инерции предусмотренного дисбалансного механизма, измеряют мгновенные угловые скорости в определенных положениях, симметричных относительно положения равновесия системы платформа-тело, по которым аналитически определяют момент инерции тела относительно оси вращения. К недостаткам этого способа относятся невысокая производительность и точность, обусловленные неточным учетом сил трения, неточным определения положения равновесия, массивностью предусмотренного дисбалансного механизма и необходимостью его отключения на ходу, невозможностью одновременного точного определения положения центра масс тела.
Наиболее близким к предлагаемому изобретению является способ определения момента инерции тела и устройство для его осуществления (Патент РФ №2112227, МПК G 01 М 1/10, дата приоритета 20.07.94, опублик. 27.05.98. Бюл. №15), при котором платформе с произвольно направленной в пространстве осью вращения, установленной в подшипниковой опоре с закрепленной на ней телом, сообщают крутящим разгонно-тормозным моментом сил любой физической природы (например, моментом сил упругости) неравномерное однонаправленное двухэтапное вращение, имеющее этап разгона к положению статического равновесия системы, переходящий в симметричный ему этап торможения от этого положения, измеряют мгновенные угловые скорости платформы в ее определенных угловых положениях, симметричных относительно положения статического равновесия системы платформа-тело, изменяют на известную величину приложенный момент сил и повторно измеряют мгновенные угловые скорости, по которым аналитически определяют осевой момент инерции тела, и после определения шести моментов инерции тела относительно шести различно направленных в теле осей вращения определяют тензор инерции тела.
К недостаткам этого способа относятся невысокая точность и производительность, обусловленная неточностью определения положения статического равновесия системы в условиях трения, приводящая к неточному равенству работ сил трения на этапах разгона и торможения, затратой времени на дополнительные эксперименты, выполняемые на других устройствах, имеющих малое трение, предназначенных для определения центров масс тел, необходимостью изменения механических параметров системы и проведения повторных испытаний. Кроме того, в этом и предыдущем способах не предусмотрено определение положения центра масс испытуемого тела. В целом этот способ предназначен для определения искомых параметров на системах с малым трением и рассчитан на применение устройств с газовыми подшипниками и другими сложными элементами, приводимых в движение неуправляемым механическим дисбалансным или пружинным приводом.
Решается задача повышения точности, производительности, расширения области применения способа определения тензора инерции тела с одновременным определением на этих же экспериментальных данных и координат центра масс тела.
Способ основан на применении программного реверсивно-антисимметричиого тормозного-разгонного движения на ограниченном угловом интервале, который выбирается независимо от положения статического равновесия подвижной системы платформа-тело. Он предназначен для осуществления на автоматизированных следящих системах, например на электромеханических системах с управляемым моментным электродвигателем, в то время как аналоги способа базируются на неуправляемом предварительно взведенном механическом приводе (упругом или маятниковом), неточно выполняющем движения системы в условиях неизвестного трения. Предлагаемый способ осуществляется на неизменяемой системе, без перенастройки, он может быть осуществлен на одном реверсивном движении, содержащем два взаимно антисимметричных этапа. Он не связан с предварительным определением положения равновесия системы, наоборот, по данным испытания попутно аналитически определяется и положение центра масс системы.
По предлагаемому способу телу сообщается замедленное вращательное движение в угловом интервале в направлении, принятом за положительное, и затем - обратное ускоренное движение, повторяющее в обратном порядке первое движение на том же угловом интервале. Угловой интервал измерений выбирается произвольно в ограничительных пределах, вне зависимости от положения равновесия системы тело-платформа, т.е. положение равновесия системы неизвестно и даже может находиться за пределами выбранного углового интервала измерений. Тормозное и разгонное движения могут быть обрамлены и соединены переходными процессами, составлять части единого реверсивного вращательного движения. Реверсивное движение может состоять из следующих этапов: переходного процесса предварительного разгона до требуемого состояния, программного тормозного движения, переходного процесса с реверсом и программного разгонного антисимметричного движения в обратном направлении.
Кинематическое уравнение вращательного движения, а также алгебраическая угловая скорость и угловое ускорение определяются по формулам:

Тормозное движение происходит на некотором конечном интервале времени [t0, t4] и на угловом интервале [ϕ0, ϕ4]. Граничные состояния этого движения обозначим следующим образом

Тормозное движение удовлетворяет условию ω0>ω4≥0. Будем предполагать, что угловая скорость монотонно убывает, т.е.

хотя можно было допустить и нарастание угловой скорости на части интервала торможения, но сохраняя условия существенной замедленности от начала к концу движения. Затем следует переходное реверсивное движение на некотором интервале [t4,  ] при
] при  , обеспечивающее вывод к некоторому моменту времени
, обеспечивающее вывод к некоторому моменту времени  системы на стартовое состояние обратного разгонного движения
системы на стартовое состояние обратного разгонного движения  . И далее следует программное разгонное движение в обратном направлении на интервале измерений [
. И далее следует программное разгонное движение в обратном направлении на интервале измерений [ ,
, ] длительности τ=
] длительности τ= -, которое удовлетворяет условию антисимметрии по отношению к тормозному движению, т.е. любому моменту времени t'∈[, ] сопоставляется момент t, в который выполняется условие
-, которое удовлетворяет условию антисимметрии по отношению к тормозному движению, т.е. любому моменту времени t'∈[, ] сопоставляется момент t, в который выполняется условие

Условие антисимметрии движения означает, что угол поворота ϕ в момент времени t, удаленный от начального момента t0 на величину Δ=(t-t0) равен углу поворота в "сопряженный" момент t', удаленный от конечного момента t4 на аналогичную величину Δ= -t'. Отсюда следуют соотношения антисимметрии при одних и тех же угловых положениях системы:
-t'. Отсюда следуют соотношения антисимметрии при одних и тех же угловых положениях системы:

Итак, пару движений, тормозное и разгонное, назовем реверсивно-антисимметричным движением на угловом интервале [ϕ0, ϕ4] при ϕ4>ϕ0 если тормозное движение удовлетворяет условию монотонного нарастания угла поворота, скалярная угловая скорость убывает (в широком смысле), угловое ускорение неотрицательно, а разгонное движение в обратном направлении имеет зависящую от времени угловую скорость, равную по величине и противоположную по знаку соответствующей переменной угловой скорости тормозного движения на одних и тех же угловых положениях системы.
Уравнение тормозного и разгонного движения связаны соотношением (4). Такая пара движений может входить в одно реверсивное движение в качестве его составных частей, соединенных переходными движениями выбега, реверса и возврата в угловую зону. Примером реверсивного антисимметричного движения является равнозамедленное-равноускоренное движение, подчиненное одному и тому же кинематическому уравнению вида

с убывающей, обращающейся в ноль и продолжающей убывать в область отрицательны значений угловой скорости согласно формуле

Здесь интервал времени [0, t0] отнесен к нерегистрируемому переходному движению. Тормозное движение выполняется на интервале [t0, t0+τ], угловая скорость обращается в ноль в момент t0+τ, затем переходит к отрицательным значениям, нарастающим по модулю, т.е. движение повторяется в обратном порядке в течение интервала [t0+τ, t0+2τ]. Пара движений осуществляется на угловом интервале  . Данное движение можно рекомендовать к использованию.
. Данное движение можно рекомендовать к использованию.
Замечание. Поскольку следящая система в условиях существенного трения может допускать существенную погрешность в моменты исполнения реверса, то целесообразно несколько уменьшить угловой интервал измерений, приняв  , а угловой интервал, примыкающий к положению реверса, отнести к ненаблюдаемому переходному процессу.
, а угловой интервал, примыкающий к положению реверса, отнести к ненаблюдаемому переходному процессу.
Вторым примером реверсивного тормозного-разгонного антисимметричного движения может служить гармоническое колебание за полупериод, состоящее из замедленного движения в положительном направлении от положения принятого за нулевое и обратного антисимметричного разгонного движения. Оно описывается кинематическим уравнением

Вторую половину полного колебания за период T=2π/k относим к переходному процессу. На указанном измеряемом интервале такого движения угловое ускорение остается неположительным и движение осуществляется в угловом интервале [ϕ0=0, ϕ4=A]. Можно взять несколько меньший угловой интервал, назначив ϕ0>0 и ϕ4<A путем соответствующего уменьшения временного интервала. Такого рода вращательное движение с гармоническим ускорением также можно рекомендовать к практическому применению.
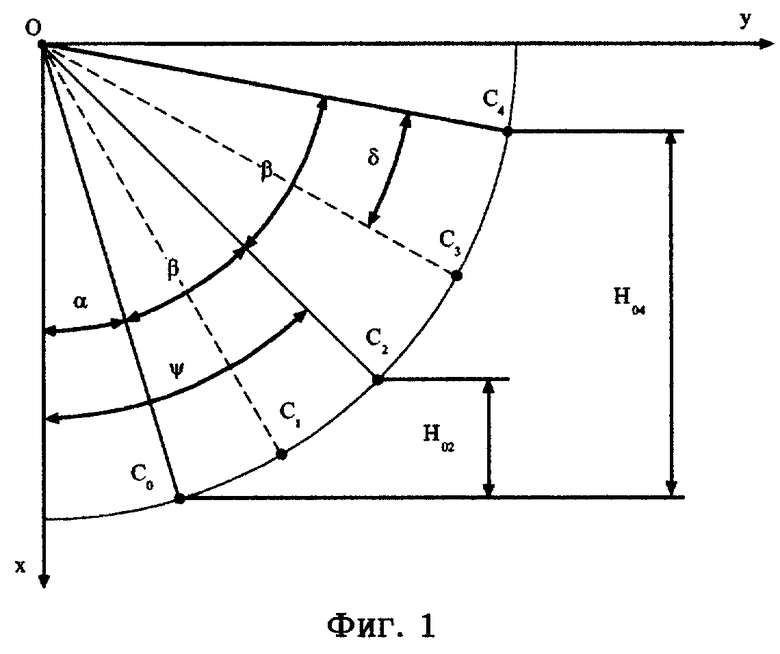
В предлагаемом способе используется измерения на паре антисимметричных движений. Получим расчетные формулы способа. Пусть на статически уравновешенной платформе с осью вращения Oz (показана точкой О на Фиг.1), образующей неотрицательный угол γ с горизонтальной плоскостью, закреплено неуравновешенное испытуемое тело массы m с неизвестным удалением r его центра масс С от оси вращения и неизвестным угловым положением этого центра. Считаем, что платформа входит в исполнительное управляемое устройство следящей системы, осуществляющей требуемое программное вращательное движение. Задача с наклонной осью вращения эквивалентна задачи с горизонтальной осью вращения, но при условии, что к телу приложена сила тяжести G=mg cosγ вместо G=mg, поэтому в дальнейшем будем условно считать, что ось вращения горизонтальна в тело имеет вес G=mg cosγ. Пусть тело совершает тормозное движение против часовой стрелки (Фиг.1) и затем - обратное антисимметричное движение. При этом его центр масс С перемещается от некоторого неизвестного начального положения ОС0 с неизвестным углом ϕ0=α к конечному положению ОС4, с углом ϕ4=α+2β, где β - известный назначенный угол, причем положим β<π. Начальный неизвестный угол α может быть любым: положительным, отрицательным, равным нулю. Центр масс С последовательно проходит назначенное промежуточное положение ОС1, среднее положение ОС2, второе промежуточное положение ОС3, которое симметрично с ОС3 по отношению к биссектрисе ОС2. Возможный выбег системы за пределы зоны измерений С0ОС4 не показан, он отнесен к переходному движению. Угол δ можно назначить равным 0,5β, 0,4β либо 0,3β, т.е. выбрать δ=λβ при λ=0,5; 0,4; 0,3. Высота подъема центра тяжести на тормозном движении от положения С0 до С4, вернее разность координат Н04=x0-x4, определяется формулой H04=r(cosα-cos(α+2β))=2r sinβ sin(α+β), или окончательно

где ψ - угол, образованный средним угловым положением отрезка ОС. Отметим, что по формуле (9) величина Н04 может быть положительной, отрицательной, равной нулю, в зависимости от величины неизвестного угла ψ.
По аналогии определяются высота подъема Н13, на перемещении в назначенной частичной зоне движения С1ОС3 и высота Н03 в "половинной" зоне С1ОС2:

или

Отметим, что множитель μ не зависит неизвестного угла ψ, т.е. считается известным, заданным. Имеем
H02=r cos(ψ-β)-r cosψ=r sinβ sinψ-r(1-cosβ)cosψ,
или, принимая во внимание выражение (9), получим окончательное выражение

Применим теорему об изменении кинетической энергии к полной зоне торможения и полной зоне антисимметричного разгона С0ОС4. В предположении точного равенства квадратов соответствующих угловых скоростей на торможении и разгоне получаем два уравнения:


Здесь I и J - момент инерции тела и приведенный момент инерции платформы (исполнительного устройства),  и
и  - квадраты краевых начальных и конечных) угловых скоростей двух движений, A04 и A40 - работы активного вращающего момента (например - электромагнитного момента) на тормозном и антисимметричном разгонном движении,V04 и V40 - работы диссипативных сил на тормозном и разгонном движениях. При этом ввиду антисимметрии состояний системы на паре движений имеем равенство работ диссипативных сил на одной и той же угловой зоне:
- квадраты краевых начальных и конечных) угловых скоростей двух движений, A04 и A40 - работы активного вращающего момента (например - электромагнитного момента) на тормозном и антисимметричном разгонном движении,V04 и V40 - работы диссипативных сил на тормозном и разгонном движениях. При этом ввиду антисимметрии состояний системы на паре движений имеем равенство работ диссипативных сил на одной и той же угловой зоне:

Также отметим, что работы активного вращающего момента удовлетворяют условиям:
А04≤0, А40>0,
где знак равенства реализуется в случае, если торможение осуществляется только за счет диссипативных сил, а обратное разгонное движение программируется как антисимметричное. Почленное вычитание уравнения (12) из (13) при условии (14) приводит к следующему уравнению, не содержащему работы сил трения:

По аналогии с уравнением (15), учитывая соотношение (10), получаем уравнение для неполного сектора С1ОС3 и половинного сектора С0ОС2 вида


Уравнения (15), (16), (17) образуют систему трех уравнений с тремя неизвестными I, H04, H02. Приведенный момент инерции устройства J считается известным (найденным из предварительного эксперимента, о котором будет сказано ниже). Путем почленного вычитания уравнения (17), умноженного на μ, из уравнения (18) получаем уравнение

Из этого уравнения находится следующая расчетная формула для осевого момента инерции испытуемого тела:

где делитель Ω определяется формулой

По формулам (18), (19) можно сначала определять приведенный момент инерции J устройства на испытаниях с известным эталонным моментом инерции тела I0

а затем переходить к определению моментов инерции других тел. Из уравнений (15), (17) находятся расчетные формулы для высот H04 и H02


Допустим, что H02 и H04 найдены. Запишем выражения (9) и (11) в виде следующей системы уравнений:


Такого вида системы решаются путем почленного возведения уравнений в квадрат и последующего сложения. В результате получаем формулу для расчета удаления центра масс С от оси вращения в виде

Угол ψ, т.е. полярный угол среднего углового положения центра масс тела С2 на его движении определяется из уравнения (23) с определением знака уравнения (22) по формуле

Взамен (25) можно применять формулу, получаемую посредством почленного деления уравнения (22) на (23) и определения четверти, в которой расположен угол ψ. Полярный угол для начального положения центра масс определяется формулой α=ψ-β. На начальном положении тела следует отметить положение вертикальной оси 0х, от которой отложить угол α или ψ, провести нормаль к оси вращения, на которой на расстоянии γ отметить точку, определяющую положение центра масс с точностью до параллельного переноса вдоль оси вращения.
Таким образом, момент инерции тела определяется в результате испытания и вычисления по формуле (18)-(19), а расстояние r от центра масс тела до оси вращения и полярный угол ψ среднего положения вычисляется по формуле (25). Тем самым определяется прямая, параллельная оси вращения, на которой расположен центр масс.
Уравнения программного движения должны удовлетворять условию существенного отличия от нуля делителя Ω, определяемого формулой (19). Убедимся, что это условие легко выполнимо. Пусть, например, назначен угол δ=0,5β и пусть программное движение удовлетворяет условиям
ω1=ω0/2, ω2=ω3=ω1=ω0/2, ω4=ω3/2=ω0/4, β=π/2, δ=π/4.
Тем самым система на тормозном движении сначала вращается замедленно, затем на неполном интервале - равномерно и затем - снова замедленно. Тогда получаем
 Ω≈0.3,
Ω≈0.3,
т.е. делитель существенно неравен нулю. Аналогичным образом было проверено существенное отличие от нуля делителя Ω в случае равнозамедленных тормозных движений и движений с гармоническим ускорением на полном интервале. Случай β≥π, когда система совершает полные обороты, исключен из рассмотрения. Полученные формулы неприменимы при β=π, поскольку тогда μ=∞, и расчетные формулы становятся математически неопределенными. Для случая полных оборотов автором была представлена заявка на изобретение способа с иными расчетными формулами, содержащими иное количество измеряемых величин.
Тензор инерции в выбранной точке О тела, его матрица, определяется по методу, предложенному в книге Гернета М.М. и Ратобыльского В.Ф. (Гернет М.М. и Ратобыльский В.Ф. Определение моментов инерции. М.: "Машиностроение", 1969), т.е. на основании шести измеренных осевых моментов инерции, взятых относительно пучка из шести осей, проходящих через точку О. В теле выбирается декартова система координат Oxyz и три дополнительные оси (четвертая, пятая и шестая), расположенные в координатных плоскостях. Изложенным выше способом можно экспериментально определить шесть осевых моментов инерции относительно шести вышеупомянутых осей
I1=Ix, I2=Iy, I3=Iz, I4, I5, I6.
Матрица тензора инерции, образованная из осевых и центробежных моментов инерции, имеет вид
Центробежные моменты инерции вычисляются через осевые моменты инерции путем решения системы трех алгебраических уравнений

где αi, βi, γi - направляющие косинусы i-й оси в системе отсчета Oxyz. В результате матрица I0 будет определена.
Пучок из шести осей можно выбрать и другим способом, например можно взять шесть осей симметрии додекаэдра с центром в выбранной точке О. В этом случае элементы тензора инерции определяются из системы шести алгебраических уравнений вида, аналогичного уравнениям (27):

Они приводят к следующей расчетной матричной формуле

где матрица шестого порядка А, образованная из квадратов и производных направляющих косинусов, имеет следующее численное значение

Одновременно с определением осевых моментов инерции по предлагаемому в заявке способу определяется положение трех линий x', y', z', параллельных осям х, y, z, проходящих через центр масс С. Например, линия z' проходит параллельно оси Oz через некоторую точку Сz, расположенную в плоскости Oxy. Эта точка задала полярными координатами rz, αz. Линия Сzz' проходит через центр масс С. Три линии, параллельные осям координат, пересекаются в центре масс. Три дополнительные линии, параллельные соответственно четвертой, пятой и шестой осям, также проходят через центр масс тела. В случае неточного определения полярных углов и полярных радиусов эти шесть линий могут не иметь точки пресечения. В этом случае центр масс следует находить как точку наибольшего сближения линий. Тогда можно найти сферическую область минимального радиуса, описанную вокруг этой точки и содержащую точки шести построенных прямых. Этот радиус будет характеризовать погрешность экспериментального определения центра масс и погрешность экспериментов.
Предлагаемый способ определения тензора инерции тела может быть осуществлен на устройстве, схематично изображенном на Фиг.2. Оно состоит из корпуса 1, вала платформы 2, тормозной муфты платформы 3, платформы 4 в виде вилки, захвата 5, вала захвата 6 с подшипниковой опорой на вилку 4, тормозной муфты 7, конической зубчатой передачи 8, электродвигателя 9, вала электродвигателя 10, датчика угол-код 11, датчика момента и управляющего компьютера (не показаны). Угол между осями 2 и 6 равен приблизительно 1.10715 рад, т.е. равен углу между осями додекаэдра.
Устройство осуществляет требуемые программные движения следующим образом. Тело закрепляется в захвате 5, отмечается нулевое положение системы, включается электродвигатель 9 при отпущенной тормозной муфте 3 и включенной муфте 7, выполняется первое испытание на паре антисимметричных движений, на котором определяется момент инерции тела относительно оси 2. Затем производится переключение муфт 7 и 3 и выполняется поворот тела вокруг оси 6 на (2π/5) рад с целью совмещения другой оси додекаэдра с осью вращения 2. Затем выполняется второе испытание, определяющее момент инерции тела относительно второй оси додекаэдра. Далее повороты и испытания повторяются еще 3 раза. После пятого испытания производится очередное (пятое) переключение муфт 3 и 7 и выполняется программное движение вокруг оси 6. По измеренным данным шести испытаний, аналитически определяется тензор инерции и центр масс тела.
В процессе технической реализации предполагаемого способа обычно возникают естественные ограничения на величины углов поворота платформы с закрепленной на ней телом, в особенности - с телом массивным и крупногабаритным (автомобиль, корабль, самолет) и предлагаемый способ рассчитан на применение при таких ограничениях, что расширяет область его применения.
Изобретение относится к определению осевых моментов инерции и тензоров инерции тел на устройствах, осуществляющих программное вращательное движение в условиях трения. Способ определения тензора инерции тела с одновременным определением центра масс заключается в том, что тело устанавливают на платформу с осью вращения, сообщают этой системе программное замедленное вращение в ограниченной произвольно выбранной зоне и обратное антисимметричное ускоренное вращение в этой же зоне, повторяющее в обратном порядке замедленное вращение с угловой скоростью противоположного знака, с равной по величине и противоположной по знаку угловой скоростью, определяют приложенный активный вращающий момент и угловую скорость на множестве угловых положений системы платформа-тело, по которым аналитически определяют осевой момент инерции и две координаты центра масс тела и по шести аналогичным испытаниям при различных угловых положениях тела на платформе аналитически определяют тензор инерции в точке тела и расположение центра масс тела. При этом платформа выполнена с произвольно направленной осью вращения, диссипация энергии через трение и сопротивление среды может быть существенной, пара взаимно ассиметричных вращательных движений может составлять две части одного реверсивного движения в одной и той же угловой зоне, положение центра масс системы заранее неизвестно и угловая измерительная зона не связывается с положением равновесия системы, активный вращающий момент может быть моментом сил любой физической природы, неизвестный диссипативный момент не включается в активный вращающий момент. 2 ил.
Способ определения тензора инерции тела, заключающийся в том, что платформе с закрепленным на ней телом, имеющей произвольно направленную ось вращения, сообщают моментом сил любой физической природы двухэтапное разгонно-тормозное вращательное движение в ограниченной угловой зоне, определяют угловую скорость платформы и активный момент сил на множестве угловых положений платформы, по которым аналитически определяют осевой момент инерции тела, и по шести различным осевым моментам инерции аналитически определяют тензор инерции тела, отличающийся тем, что в условиях неизвестного положения центра масс тела и неопределенного положения равновесия системы платформа-тело ей последовательно сообщают два взаимно антисимметричных движения в одной и той же произвольно выбранной угловой зоне, не связанной с положением равновесия системы, одно из них - замедленное вращательное движение, другое - обратное антисимметричное движение в этой же зоне, повторяющее в обратном порядке замедленное движение с равными по величине и противоположными по знаку значениями угловой скорости в повторяющихся угловых положениях системы, наряду с тензором инерции по экспериментальным данным определяют положение центра масс тела.
| СПОСОБ ОПРЕДЕЛЕНИЯ МОМЕНТА ИНЕРЦИИ ТЕЛА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2112227C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОСЕВОГО МОМЕНТА ИНЕРЦИИ ТЕЛА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1995 |
|
RU2115904C1 |
| Способ определения момента инерции тела | 1986 |
|
SU1415090A1 |
| WO 9606339 A1, 29.02.1996 | |||
| DE 4317058 C1, 03.11.1994 | |||
| АППАРАТ МЕМБРАННОЙ ЭКСТРАКЦИИ ДЛЯ ДЕТОКСИКАЦИИ БИОЛОГИЧЕСКИХ ЖИДКОСТЕЙ | 1993 |
|
RU2061532C1 |

