(54) СПОСОБ РЕГУЛИРСеАНИЯ НАПРЯЖЕНИЯ НА ОБМОТКАХ ЭЛЕКТРОМАГНИТА УСКОРИТЕЛЯ
В известных способах регулирования напряжения 11спользуются сигналы от двух датчиков, располагаемых в магнитном поле а также двойное -преобразование временной интервал-напряжения.
С целью повышения точности регулировки напряжения предлагается способ, позволяющий обойтись без двойного преобразования интервала времени в напряжении, что повышает стабилизацию питания катушек
электромагнита. Предлагаемый способ осуществляет отделение временного интервала ошибки и преобразование его в новый временной интервал, усиленный в К раз без промежуточных преобразований в другие
величины.
На чертеже изображена блок-схема, реализующая предлагаемый способ стаби.лизации.
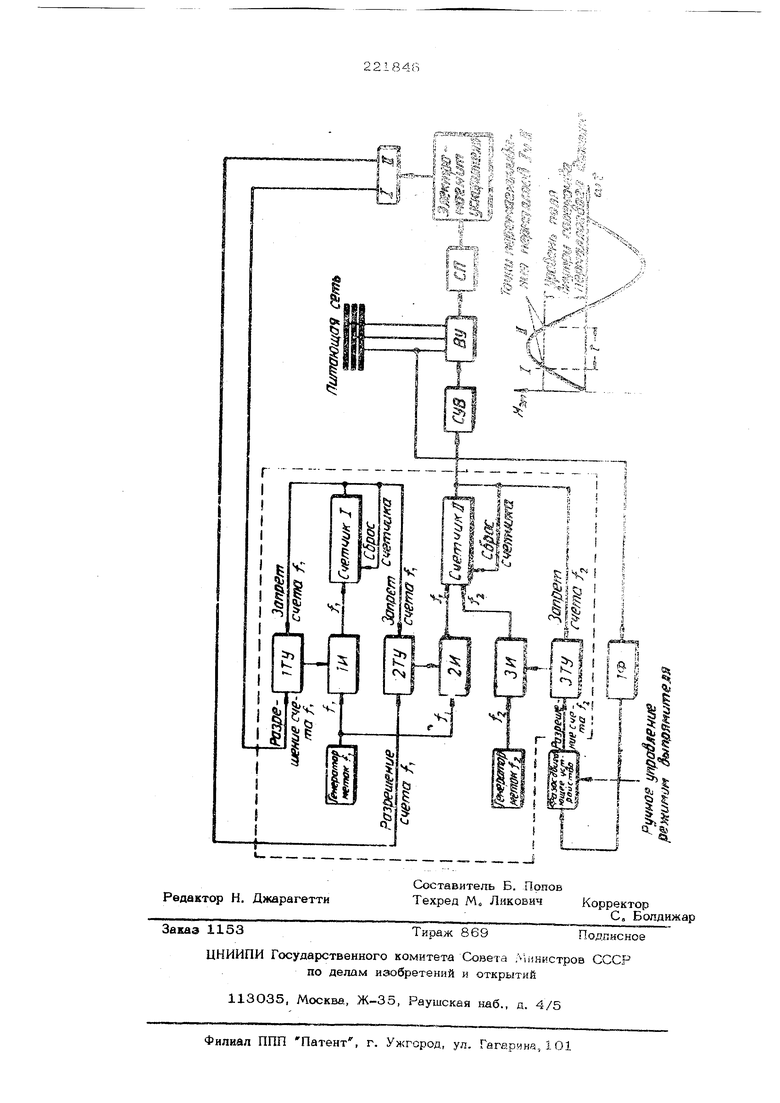
i Она содержит систему сеточного управ- ления выпрямителем СУВ; управляемый выпрямитель ВУ; систему подпитки электромагнита ускорителя СП; пермаллоевыэ датчики I и II установленные в зазоре электромагнита; формирователь 1 Ф импу-
льса .синхронияируюшего работу системы сеточного управления выпрямителем; триггеры 1 ТУ, ЗТУ, управляющие работой :схем совпадения 1И-ЗИ.
Схема работает следуюи1им образом, I Генератор меток времени с частотой еле- ;дования . работает в непрерывном режи;ме. Частота следования меток стабилизи- 1рована кварцевым резонатором и определп|ется требуемой точностью измерения вре1менного интервала ошибки. j Положительный импульс пермаллоевого .датчика 1 открывает триггер 1ТУ и схему 1И. Генератор меток времени с частотой следования / осуществляет заполнение счетчика 1 до появления на его выходе импульса переноса. Емкость счетчика 1 превышает максимально возможную дли;тельность интервала между импульсамм датчиков. Продолжительный импульс пермаллоевого датчика jl открывает триггер 2Т и схему 2И. С этого момента начинается заполнение счетчика П, При появлении на выходе счетчика Г импульса переноса осуществляется запирание триггера 1ТУ и
схемы 1И, сброс счетчика I и остановка счетчика Ц (так как запирается триггер 2 ТУ и схема 2И).
При изменении временного интервала
между импульсами пермаллревых датчикоь X и fl заполнение счетчика -Ц метками с частотой следования / будет изменяться пропорционально -величине изменения временного интервала между ними. Если после каждого частичного заполнелия счет чика П сигналом ошибки (частота следова-,;я меток ) осуществить досчет метками более низкой частоты следования можно получить увеличение дрейфа выход 1ного импульса переноса счетчика tt по сравнению с дрейфом временного интервала между импульсами пермаллоевых датчиков в f. у раз. Во всех предьщущих рассуждениях предполагалось, что емкость сч :тчика П превышает максимально возможкую длительность интервала ошибки.
Формирование задерлоси импульса сеточного управления выпрямителем в функции интерввла ошибки осуществляется следуюшим образом.
Формирователь 1Ф гйнерирует однопслярные положительные импульсы в момент перехода через ноль синусоидального напряжения питающей выпрямитель сети.
В фйзосдвигающем устройстве осуществляется изменение фазового соотношения между генерируемыми импульсами и синусоидальным напряжением питающей сети, т.е. изменяется угол, зажигания вентилей управляемого выпрямителей.
При поступлении на вход триггера ЭТУ импульса сеточного управления выпрямителем последний открьюает схему ЗИ и с кварцованного генератора меток времени с частотой следования f на счетчик П начинает поступать серия импульсов с частотой следования / . Эта серия осуществляет окончательное заполнение сче1 чика П . до появления на выходе импульса переноса. Импульс переноса сбрасьтает счетчик П и запирает триггер управления ЗГУ (а следовательно, и гхему ЗИ). Этим же импульсом осуществляется запуск сиетемы сеточного управления выпрямителем. Следовательно, задзржка импульса, управniocuiero системой сеточного управления выпрямителем, будет изменяться в функции величинь интервала ошибки, умноженной на ко аффиииеит усиления сиртемы стабилизации Кisfj/f Для изменения коэффициента усиления системы достаточно изменить частоты следования меток времени кварцованных генераторов.
Преобразование временного интервала ошибки во временной интервал задержки управляющего системой стабилизации импульса осушествляатся непосредственно в дискретных элементах. Точность этого преобразования определяется только частотами следования меток времени кварцованных генераторов и ни от каких других параметров системы не зависят. Поскольку всё элементы системы являются дискретными и работают в ключевых режимах, автоматически снимается вопрос о температурных уходах системы, свойственных всем известным системам стабилизации с
двойным преобразованием сигнала ошибки. У всех современных электронных синхротрюнов питание электромагнита переменным током осуществляется в резонансном контуре. В общем случае собственные частоты колебаний питающей сети н резонансного контура электромагнита могут не совпадать. А это означает, что частота измерения сигнала ошибки и частота следования кмпульсов управления выпрямителем не совпадают, ti этом случае блок-схема должна быть несколько усложнена путем введения в нее еще одного счетчика /. Счетчики II работают поочередно. Тогда в случае заполнения одного из счетчиков II сигналом ошибки (метки с частотой следования fj ) и при одновременном поступлени импульса с фазосдвигаюшего устройства фаза импульса управления моментом поджигания вентилей выпрямителя будет сформирована по ошибке, содержащейся в другом счетчике Пи измеренной в предыдуще периоде колебаний резонансного контура электромагнита.
Слемует отметить, что система сеточного упраьления выпрямителем в рассматрив С мом случае должна синхронизироваться и управляться одним импульсом за период частоты питающей сети. У большинст ва существующих систем сеточного управ- |Лен11Я число импульсов управления равно числу фаз выпрямителя.
Такая одноимпульсная система сеточного управления может быть осуществлена по принципу деления периода сети на равные части (по числу фаз выпрямителя) с помощью пересчетных схем.
Предмет изобретения
го вентиля питания обмотки электромагнита, отличающийся тем, что, с целью повышения стабильности напряжения для прео аэования ин1ервала времени в фазовый сдвиг осуществляют следуюоше операции: подгют импульсы от генератора определенной частоты на-пересчетную схему, которую запускают сигналом с первого датчика магнитного поля; подают импульсы от того же генератора на вторую такую же пересчетную схему, эапуо;каемую сигналом от второго датч;1ка магнитного поля; в момент заполнение ттервой пересчетной схемы отключают вторую пересчетную схему от генератора, г. в момент прохождения через нуль напрял ения ;в питающей сети подключают вторую пе|рвсчетную схему к генератору импульсов 1с другой частотой и после заполнения второй пересчетной схемы включают запускающее устройство управляющего вен|ТИЛЯ.
| название | год | авторы | номер документа |
|---|---|---|---|
| Инфранизкочастотный фазометр | 1975 |
|
SU736004A1 |
| ПОРОГОВЫЙ БЛОК УПРАВЛЕНИЯ РЕЖИМОМ РАБОТЫ ИСПОЛНИТЕЛЬНОГО МЕХАНИЗМА ИЛИ ТЕХНОЛОГИЧЕСКОГО ОБОРУДОВАНИЯ С ФУНКЦИЕЙ ДИАГНОСТИКИ ВХОДНОГО СИГНАЛА | 2017 |
|
RU2661761C1 |
| Устройство для преобразования временных интервалов в код | 1985 |
|
SU1310771A1 |
| Цифровой регулятор | 1981 |
|
SU1004967A1 |
| Устройство для определения коэффициента передачи | 1981 |
|
SU957128A1 |
| Устройство для преобразования частоты в код | 1977 |
|
SU696604A1 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 1993 |
|
RU2067351C1 |
| Контурная система программного управления | 1991 |
|
SU1800446A1 |
| АППАРАТУРА РАДИАЦИОННОГО КОНТРОЛЯ ТЕХНОЛОГИЧЕСКОГО ПРОЦЕССА (АРКТ) | 2017 |
|
RU2661451C1 |
| Преобразователь периода следования импульсов в цифровой код | 1974 |
|
SU598234A1 |