Известен способ разработки лесосек с помощью трелевочных тракторов, управляемых трактористом из кабины с помощью рычагов и педалей и выполняющих технологические операции в произвольной последовательности.
По предлагаемому способу оператор обеспечивает управление группой трелевочных тракторов.
Достигается это тем, что оператор осуществляет одновременную передачу команд управления с помощью радиотелеавтоматического устройства, причем командам управления предшествует команда выбора определенного трактора, в то время как остальные тракторы автоматически отрабатывают технологические операции на основе ранее переданных аналогичных команд управления.
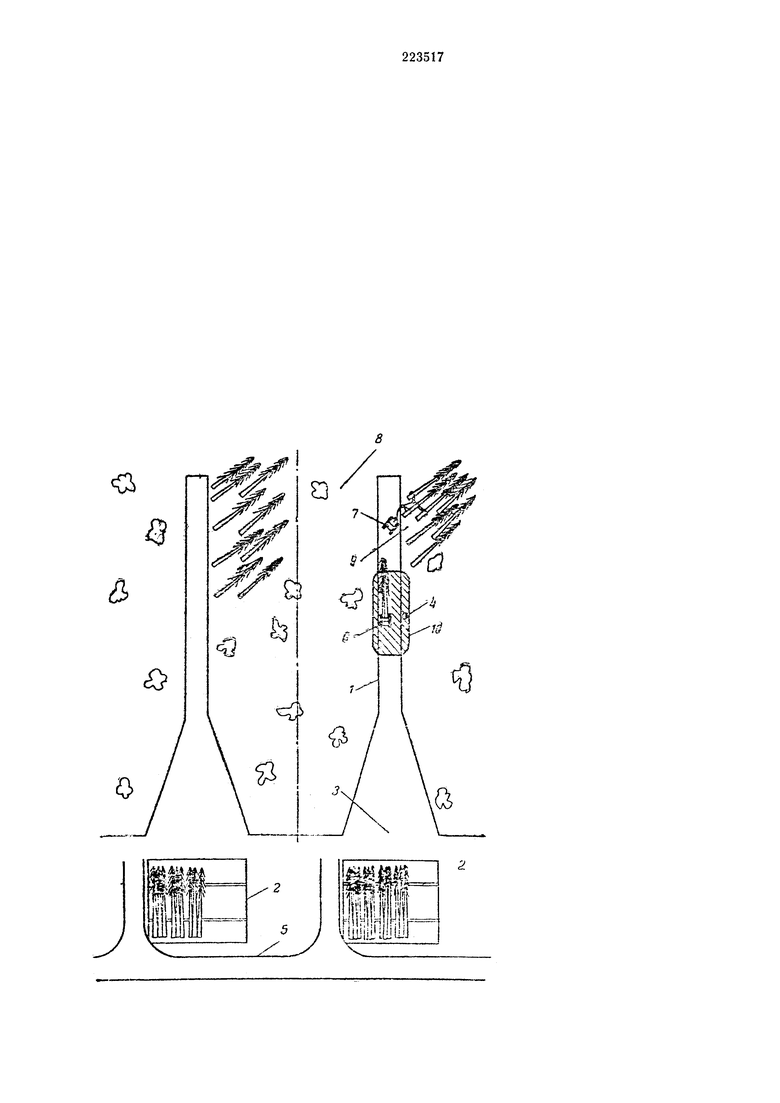
На чертеже представлена технологическая схема разработки лесосеки.
Пасечные волоки 1 со стороны погрузочных площадок 2 разрубают на участке 3 на ширину 19 м для увеличения сектора обзора оператором 4 тракторов, находящихся на погрузочной площадке 2. Погрузочные площадки шириной 19 м располагают по оси пасечного волока перпендикулярно к лесовозному автомобильному усу 5.
Оба трелевочных трактора работают на одной пасеке. Движение колонной трелевочных тракторов по волоку и выполнение других операций производят с постоянным межоперационным интервалом во времени. Для обеспечения непрерывной работы трелевочных тракторов 5 и 7 чокеровку деревьев на пасеке 8 и отцепку их на погрузочной площадке 2 рабочие производят последовательно по одному трактору. Это означает, что к моменту окончания зацепки деревьев к трактору 6 подходит трактор 7, разворачивается и становится под погрузку на той же пасеке. Аналогично осуществляется процесс на погрузочной площадке 2 к моменту отцепки деревьев у трактора 6. Трактор 7 подходит под разгрузку, затем трактор 6 отправляют порожняком к месту сбора деревьев 9, а на тракторе 7 производят отцепку пачки.
Таким образом, одновременное управление двумя трелевочными тракторами одним оператором исключает простои этих тракторов на конечных пунктах на основе последовательности выполнения всех трелевочных операций.
Оператор 4 управляет трелевочными тракторами, находясь на той же пасеке, где производят трелевку.
Максимальное расстояние трелевки, как показали испытания, при визуальной видимости оператором фронта работы на трелевке составляет 250 м. Испытаниями также установлено, что оператору удобнее находиться при сборе трактором пачки на расстоянии не более 50 м от этого места сосредоточения операций. Рабочее место оператора может быть на земле и на вышке для увеличения радиуса видимости и удобства обзора.
При нахождении оператора на земле он может свободно передвигаться по пасеке в зоне 10, управляя тракторами на ходу.
Присутствие оператора на пунктах погрузки и разгрузки деревьев не требуется. Связь оператора с чокеровщиками осуществляется жестовыми сигналами.
Управляя тракторами, оператор наблюдает за тем, как выполняются посланные команды по тем действиям, которые совершают исполнительные механизмы и сам трактор, а также следит за показаниями световой сигнализации.
В зависимости от -выполняемых операции на пасеке и взаимодействия тракторов между собой оператор, соответственно, в каждый момент времени принимает решение по управлению процессом трелевки путем передачи команд на тракторы.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ЛЕСОЗАГОТОВКИ | 2012 |
|
RU2513528C2 |
| СПОСОБ РАЗРАБОТКИ ЛЕСОСЕКИ | 2006 |
|
RU2325798C2 |
| Способ лебедочной трелевки и устройство для ее осуществления | 2016 |
|
RU2633792C1 |
| Способ разработки лесосеки | 1989 |
|
SU1776371A1 |
| СПОСОБ ЛЕСОЗАГОТОВОК | 1998 |
|
RU2149536C1 |
| СПОСОБ ВАЛКИ И ТРЕЛЕВКИ ДЕРЕВЬЕВ ВАЛОЧНО-ТРЕЛЕВОЧНОЙ МАШИНОЙ | 2012 |
|
RU2536627C2 |
| СПОСОБ РАЗРАБОТКИ ЛЕСОСЕК | 2005 |
|
RU2293463C1 |
| СПОСОБ ЗАГОТОВКИ СОРТИМЕНТОВ И ПАКЕТОВ СУЧЬЕВ НА ЛЕСОСЕКЕ | 2012 |
|
RU2496302C1 |
| Способ разработки лесосеки канатной лесотранспортной системой | 2019 |
|
RU2719701C1 |
| СПОСОБ РАСКРЯЖЕВКИ УЛОЖЕННЫХ В ШТАБЕЛЬ ДЕРЕВЬЕВ | 2014 |
|
RU2599563C2 |
Способ разработки лесосек с проведением подготовительных работ по разрубке трелевочных волоков с последующей валкой и трелевкой леса с помощью трелевочных тракторов, выполняющих технологические операции в произвольной последовательности, отличающийся тем, что, с щелью обеспечения управления группой трелевочных тракторов одним оператором, последний осуществляет последовательную передачу команд управления на одной частоте с помощью радиотелеавтоматического устройства, причем командам управления предшествует команда выбора определенного трактора, в то время как остальные тракторы автоматически отрабатывают различные технологические операции на основе ранее переданных аналогичных команд управления.
