Известны устройства для автоматического измерения малых угловых перемещений, содержащие преобразователь угол - код на основе кодового диска со считывающим устройством, чувствительный элемент, сравнивающее устройство, умножитель частоты, эталонный генератор, усилитель схемы умножения и фильтр, настроенный на разностную частоту между сигналами датчиков и частотой эталонного генератора.
Описываемое устройство отличается от известных тем, что в нем использован прецизионный электрический редуктор, связывающий входной и выходной валы преобразователя, а в качестве чувствительного элемента применен экранированный измеритель напряженности магнитного поля частотного типа, выходной сигнал которого определяется результирующей напряженностью, создаваемой двумя магнитными системами, угловое положение одной из которых связано с угловым положением объекта, а второй - с приводом и выходным валом. Привод электрически связан с выходом сравнивающего устройства, один из входов которого подключен к выходу умножителя частоты, а второй - к выходу фильтра, вход последнего через усилитель соединен с частотным датчиком, поляризуемым источником возбуждающего сигнала, а входы схемы умножения соединены с эталонным генератором и выходом частотного фильтра. Это позволяет повысить точность измерения и снизить разрядность кодового диска.
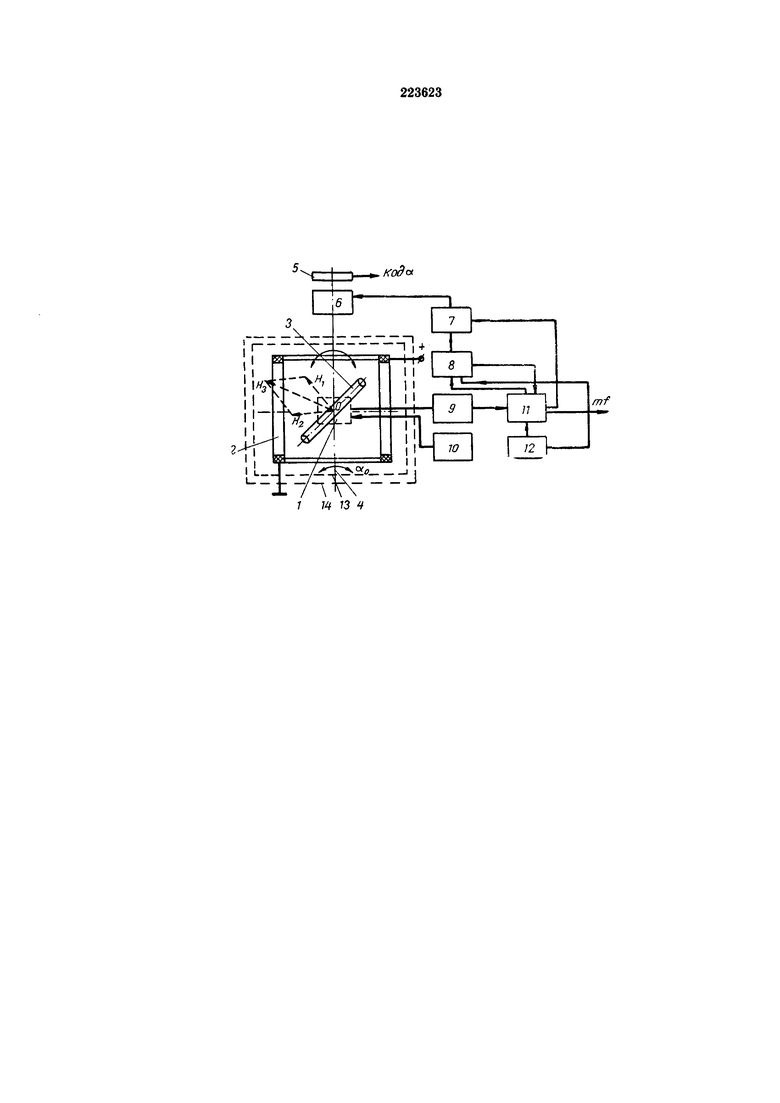
На чертеже представлена блок-схема описываемого устройства.
Устройство содержит частотный датчик 1, например камертонного типа, датчик ядерно-прецессионного магнитометра и т.п., преобразующий напряженность поля в частоту; кольца Гельмгольца 2, обтекаемые постоянным током и включенные последовательно с магнитным контуром 3, угловое положение которого задается входным валом 4; кольца имеют степень свободы относительно оси с центром О и изменяют свое угловое положение с изменением углового положения контролируемого объекта; считывающее устройство 5 с кодовым диском; привод 6 колец Гельмгольца; сравнивающее устройство 7 частот, управляющее приводом 6; умножитель частоты 8; усилительный блок 9; источник 10 возбуждающих сигналов (в случае использования ядерного датчика); коммутатор и фильтр 11, настроенный на частоту датчика, соответствующую исходному положению колец Гельмгольца; камертонный генератор 12 эталонной частоты с плавной расстройкой; магнитный экран 13 из пермаллоя; проводящий экран 14 для уменьшения наводок.
Принцип действия предлагаемого устройства заключается в следующем.
В объеме, экранированном от внешних постоянных и переменных магнитных полей с помощью экранов 13 и 14, помещают частотный датчик 1 (например, камертонного, ядерно-прецессионного типа), а также две магнитные системы 2 и 3, создающие напряженности поля H1 и H2 соответственно.
В зоне датчика 1 образуется суммарное поле, величина которого связана с углом α0 следующим соотношением:

За исходное принимают положение осей магнитных систем 2 и 3, когда векторы H1 и H2 противоположны.
На выходе датчика 1, возбужденного сигналом с выхода источника 10 (если в качестве частотного датчика используется ядерно-прецессионный, который нужно предварительно поляризовать), а также на выходе блока 9 появляется сигнал, частота которого жестко связана с гиромагнитным отношением γ:

На выходе фильтра 11 появляется сигнал с частотой

где  - частота опорного генератора 12. Этот сигнал поступает на умножитель частоты 8 с кратностью умножения m.
- частота опорного генератора 12. Этот сигнал поступает на умножитель частоты 8 с кратностью умножения m.
В этом случае привод 6 включается так, чтобы разность частот стала равна нулю, после чего привод 6 включается, и устройство возвращается в исходное положение.
В режиме измерения, после некоторого разворота входного вала 4, на входе умножителя частоты 8 вновь появляется сигнал с частотой  , несущей полезную информацию
, несущей полезную информацию  .
.
После окончания счета импульсов частоты  в регистре сравнивающего устройства 7 это число запоминается, умножитель частоты 8 отключается от выхода фильтра 11 и включается на выход опорного генератора 42, а привод 6 включается так, чтобы происходило дальнейшее увеличение угла между магнитными системами 2 и 3. Одновременно ведется контроль частоты датчика 1 (без ее умножения) и после достижения равенства кодов частот привод 6 выключается.
в регистре сравнивающего устройства 7 это число запоминается, умножитель частоты 8 отключается от выхода фильтра 11 и включается на выход опорного генератора 42, а привод 6 включается так, чтобы происходило дальнейшее увеличение угла между магнитными системами 2 и 3. Одновременно ведется контроль частоты датчика 1 (без ее умножения) и после достижения равенства кодов частот привод 6 выключается.
В этом случае в зоне колец 2 создается поле H4, в m раз большее первоначального поля:

(условие равенства частот),
или
Здесь  и H4 - значение частоты и поля при равенстве частот. Отсюда видно, что чувствительность схемы увеличена в m раз. При этом в m раз возрастает и амплитуда сигнала на выходе частотного датчика 1, поскольку она пропорциональна напряженности результирующего поля и напряженности поля поляризации. При малых углах (порядка единиц секунд) устройство обладает достаточной для практических нужд линейностью.
и H4 - значение частоты и поля при равенстве частот. Отсюда видно, что чувствительность схемы увеличена в m раз. При этом в m раз возрастает и амплитуда сигнала на выходе частотного датчика 1, поскольку она пропорциональна напряженности результирующего поля и напряженности поля поляризации. При малых углах (порядка единиц секунд) устройство обладает достаточной для практических нужд линейностью.
Диапазон измеряемых углов может быть определен по формуле (1), если результирующую напряженность Н3 принять равной  . При требовании к точности измерения углов 5-10% стабильность используемых в измерителе полей достигается без затруднения, а ядерная константа γ практически не изменяется при вариациях внешних условий.
. При требовании к точности измерения углов 5-10% стабильность используемых в измерителе полей достигается без затруднения, а ядерная константа γ практически не изменяется при вариациях внешних условий.
Описываемое устройство может найти применение в системах автоматического измерения угловых перемещений, причем его использование наиболее эффективно в системах измерения малых углов с повышенной точностью, когда к качеству работы предъявляются особо высокие требования.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЧАСТОТНЫЙ ДАТЧИК | 1968 |
|
SU211364A1 |
| ВСЕСОЬЭЗНАЯ яшш-;?кш-^ид- БИБлИО i LHA | 1973 |
|
SU371417A1 |
| ЯДЕРНО-ПРЕЦЕССИОННЫЙ МАГНИТОМЕТР | 1972 |
|
SU335649A1 |
| Радиоспектрометр ядерного магнит-НОгО РЕзОНАНСА | 1979 |
|
SU817557A1 |
| Способ измерения магнитных полей | 1963 |
|
SU497474A1 |
| СПОСОБ ПЕЛЕНГАЦИИ РАДИОСИГНАЛОВ И ПЕЛЕНГАТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2383897C1 |
| Ядерно-резонансный прибор | 1959 |
|
SU130194A1 |
| ЯДЕРНЫЙ ПРЕЦЁССЙОНМЫй МАГНИТОМЕТР | 1968 |
|
SU213936A1 |
| Автоматический протонный тесламетр | 1975 |
|
SU554519A1 |
| УСТРОЙСТВО для ИЗМЕРЕНИЯ МАГНИТНОГО ПОЛЯ И ЕГО ВАРИАЦИЙ | 1973 |
|
SU375605A1 |
Устройство для автоматического измерения малых угловых перемещений, содержащее преобразователь угол - код на основе кодового диска со считывающим устройством, чувствительный элемент, сравнивающее устройство, умножитель частоты, эталонный генератор, усилитель и фильтр, настроенный на разностную частоту между сигналами датчиков и частотой эталонного генератора, отличающееся тем, что, с целью повышения точности измерения и снижения разрядности кодового диска, в нем использован прецизионный электрический редуктор, связывающий входной и выходной валы преобразователя, а в качестве чувствительного элемента применен экранированный измеритель напряженности магнитного поля частотного типа, выходной сигнал которого определяется результирующей напряженностью, создаваемой двумя магнитными системами, угловое положение одной из которых связано с угловым положением объекта, а второй - с приводом и выходным валом, причем привод электрически связан с выходом сравнивающего устройства, один из входов которого подключен к выходу умножителя частоты, а второй - к выходу фильтра, вход которого через усилитель соединен с частотным датчиком, поляризуемым источником возбуждающего сигнала, а входы схемы умножения соединены с эталонным генератором и выходом частотного фильтра.
