Предлагаемый затвор из трех механизмов. Первый механизм допускает открытие шахтных дверей только после остановки против них клети и состоит из складного поворотного пружинящего захвата, который отпирает дверь, выдвигая для этого из гнезда запорный шпингалет, при помощи воздействия на него лапы клети и дверной ручки, связанной с ним посредством промежуточной тяги. Второй механизм допускает спуск или под7зем клети 1ОЛ)КО при запертых дверях всех этажей шахты и состоит из двуплечего рычага, который под воздействием пружины и особой лапы, прикрепленной к одной из ствоf)OK двери, застопоривает пусковой механизм нод-ьемника при неполном прикрытии этой створки. Третий механизм обеспечивает совместное прикрытие обеих створок каждой двери и состоит из поворотного около одного своего конца упора, который при закрывании одной створки двери приподнимает свой свободный конец и создает возможность закрытия второй створки, воздействующей на стопор пускового механизма.
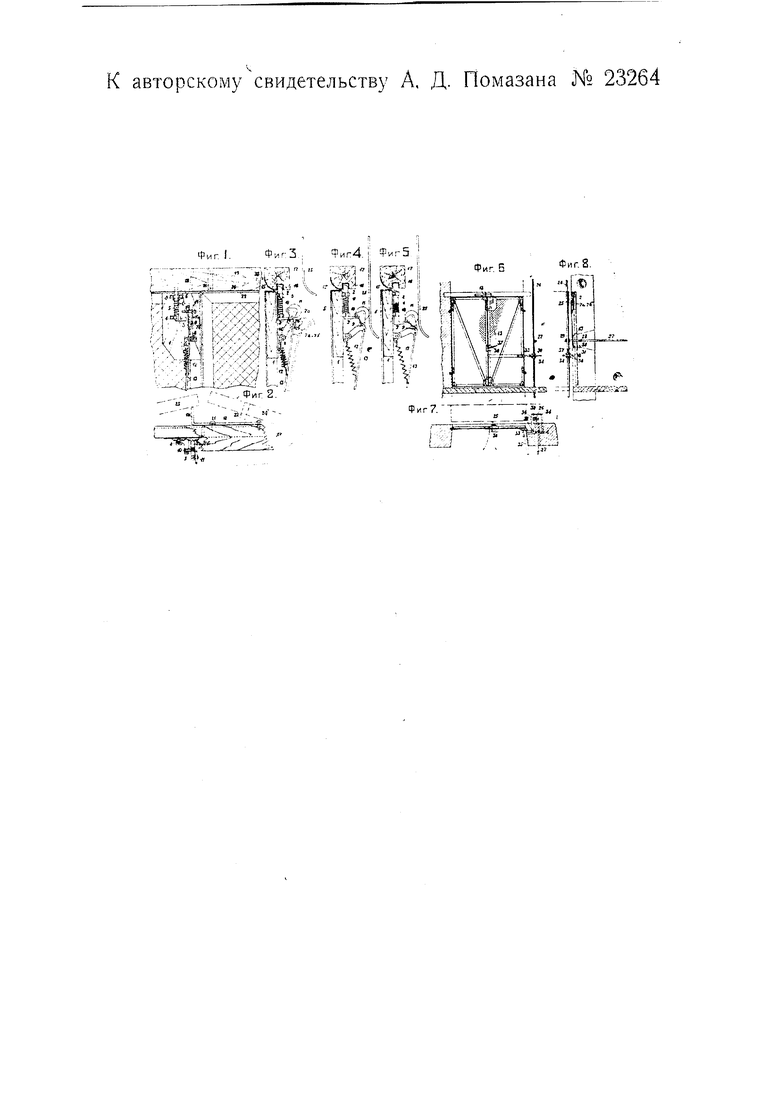
На чертеже фш 1 и 2 изображают вид первого и третьего механизмов со стороны шахты и в плане; фиг. 3, 4 и 5 - боковой вид первого механизма при различных положениях клети, захвата и 1ппингалета; фиг. 6, 7 и 8 вид второго механизма спереди, в плане и сбоку.
В верхнем углу одной из створок двери CD стороны шахты па панели J (фугг. 1 - 5)
укреплен в двух направляющих 4 шпингалет 2 с плечом 3, упорным штифтом 9 и пружиной 5, под действием которой верхний конец шпингалета, скользя при закрывании створки по галтели 15 косяка 17, входит в гнездо 16 и запирает створку.
На той - же панели на шарнире S укреплен захват, который состоит из двух плеч 7п и 76, соединенных шарниром //, и который под действием Внешних сил ломается в своем шарнире в сторону двери, а будучи разгружен возвращается в спрямленное положение пол, влиянием пружины 9. Плечо 7а несет на себе ролик //и палец W, а плечо 76 шарнирно соединяется с внутренним плечом 37 дверной ручки 36 посредством тяги /J, связанной с панелью дверной створки при помощи пружины /2.
Обычно захват под действием пружины /2 находится в положении, изображенном на чертеже (фиг. 3) сплошными линиям. При повороте дверной ручки вниз, кО1-да клеть не стоит против этой двери, захват переме цается в положение, изображенное на чертеже пунктиром, ке задевая шпингалета. Если же против двери находите: клеть с ее упорной полосой 25 (фиг. i и 5), тогда захват при своем перемещении под действием дверной ручки и промежуточной тяги упирается роликом в упорную полосу клети, ломается в сторону двери, и продолжая перемешат ся, задевает своим пальцем плечо пгпингалета, выводит смо верхний конец ия гнезда и отпирает дверь.
Пусковой механизм подъемника приводится в действие осевым перемещением вертикальной штанги 26 (фиг, б - 8), идущей вдоль всей шахты, каковое перемещение осуществляется при помощи рукояток 27, помещаемых в каждом итаже с дверями шахты.
На штанге против створки каждых дверей, несущей на себе шпингалет, наглухо закреплены две муфточки 30 с некоторым зазором между ними. В кладке стены или в косяке двери на шарнире 32 укреплен двуплечий рычаг 31, который принейтральном положении штанги 26, соответствующем горизонтальному положению рукоятки 27, и при открытой двери 35 (фиг. 7) находится в плоскости зазора между муфточками и при помощи пружины 34 входит своим длинным плечом в этом зазор и застопоривает штангу, а вместе с этим и пусковой механизм подъемника. К створке двери в одной плоскости с рычагом 5/ прикреплена лапа 33, которая при закрывании двери задевает за короткое плечо рычага и выводит его длинное плечо из зазора между муф1 очками, после чего штанга приобретает возможность осевого перемещения и приведения в действие пускового механизма подъемника. Длина лапы и длина короткого плеча рычага рассчитываются таким образом, что освобождение штанги происходит только при полном закрытии двери и запора ее при помощи шпингалета,
С целью обеспечения закрывания обеих створок двери одна из них, не имеющая на себе шпингалета, снабжена лапкой 22 (фиг, 1 и 2), а на верхнем косяке с наружной стороны над этой створкой на шарнире 38 укреплен упор 18, снабженный выступом 20 и плечом J9 и ограниченный в своем движении направляющей скобой 2/ При закрывании створки ее лапка подпирает выступ 20 и приподнимает вместе с упором его плечо /9, При открытой створке упор занимает нижнее положени.е и своим плечом /9 препятствует закрытию второй створки, несущей на себе запорный шпингале;.
П р ед мет изобретения.
1.Автоматический затвор для двухстворчатььч шахтных подъемников, отлищающийся тем. что с целью устранения произвольного привода в действие механизма для перемещения клети, устранения возможности пуска его в ход при открытых дверцах и возможности пуска в ход указанного механизма лишь при полном закрытии обсртх створок, - применен поворотный, складной пружинный захват 7а, 7б, соединенный с поворотной дверной рукояткой 36, предназначенный для воздействия на запорный для дверец орган лишь при правильном положении клети - при посредстве присоединенной к последней полосы 25, приводящей захват в рабочее положение путем его складывания- для освобождения створок, одна из коих снабжена приспособлением для замыкания переводной штанги 26 при открытых створках двери - при посредстве коленчатого пружинного рычага 31, 32. и воздействующей на него лапы 33, присоединенной к одной из створок для обеспечения совместного полного закрытия коих применен поворотный упор J8 с препятствующим закрытию этой створки плечом 19 и выступом 20, предназначенным для отвода плеча 19 при упоре в лапку 22, надавливающую на указанный выступ 20 лишь при полном закрытии несущей ее другой створки,
2.Форма выполнения по п. I затвора, отличающаяся тем, что для сдвига самозащелкивающегося запорного органа, выполненного в виде пружинного шпингалета 2,- он снабжен плечом 3, для надавливания на которое часть 7а пружинного захвата снабжена пальцем 10 и имеет ролик //, предназначенный служить упором для полосы 25, при повороте шарнирно связанной с частью 7а - части 76 захвата, соединенной пружинной тягой 13 с поворотной рукояткой 36 и при этом поворачивающейся относительно вышеуказанной части 7а, оттягивающей пальцем 10 шпингалет 2 вниз и выводящей его из гнезда 16.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОСТАНОВОЧНО-ПУСКОВОЙ МЕХАНИЗМ ДЛЯ ПОДЪЕМНИКОВ | 1928 |
|
SU9819A1 |
| УСТРОЙСТВО ДЛЯ ОГРАНИЧЕНИЯ УГЛА ПОВОРОТА СТВОРКИ | 2013 |
|
RU2514485C1 |
| ОГРАНИЧИТЕЛЬ УГЛА ПОВОРОТА СТВОРКИ | 2013 |
|
RU2514486C1 |
| ОГРАНИЧИТЕЛЬ ПРОСВЕТА ОТКРЫВАНИЯ СТВОРКИ | 2013 |
|
RU2514487C1 |
| УСТРОЙСТВО ФИКСАЦИИ СТВОРКИ ПРИ НЕПОЛНОМ ЕЕ ПОВОРОТЕ | 2014 |
|
RU2538927C1 |
| УСТРОЙСТВО ДЛЯ ОГРАНИЧЕННОГО ПОВОРОТА СТВОРКИ | 2014 |
|
RU2551734C1 |
| Предохранительная стволовая дверь шахтного подъемника | 1980 |
|
SU901227A2 |
| УСТРОЙСТВО ФИКСАЦИИ ПРИОТКРЫТОЙ СТВОРКИ | 2014 |
|
RU2546435C1 |
| ПРИВОД УПРАВЛЕНИЯ ПРИСЛОННО-СДВИЖНОЙ ДВЕРИ ТРАНСПОРТНОГО СРЕДСТВА | 2020 |
|
RU2765326C1 |
| Устройство привода двухстворчатой двери | 2021 |
|
RU2784881C2 |