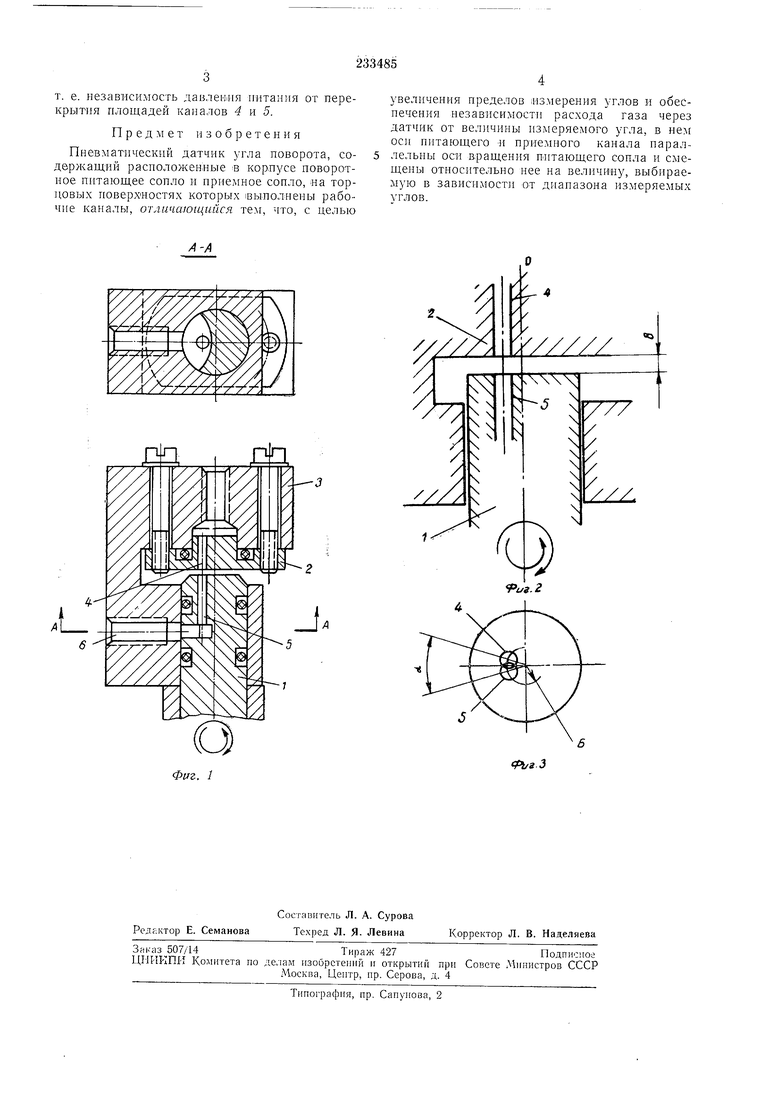
В Пневматических системах автоматического регулирования широко применяются датчики угла поворота, в задачу которых входит непрерывное преобразование углового положения какого-либо вала в пропорциональное ему управляющее давление на выходе датчика. Известны пневматические датчики поворота, содержащие расположенные в корпусе поворотное питающее сопло и .приемное сопло, на торцовых поверхностях которых .выполнены рабочие каиалы. Датчики угла поворота, построенные по принципу сопло - приемник, при хорошей линейности и крутизне зависимости давления от угла поворота предназначены для измерения только весьма малых углов (не более 10) и имеют существенный недостаток, заключающийся в изменении расхода газа через датчик в зависимости от измеряемого угла. Предложенный датчик отличается от известных тем, что в нем оси питающего и приемного канала параллельны оси вращения питающего сопла и с.мещены относительно нее на величину, выбираемую в зависимости от диапазона измеряемых углов, что является новым и позволяет увеличить пределы измерения углов и обеспечить независимость расхода газа через датчик от велИчины измеряе.мого угла. На фиг. 1 представлена конструкиия предлагаемого датчика; на фиг. 2 и 3 - его схема. Датчик угловых положений содерл;1 т питающее сопло /, приемное сопло 2 и корпус и с системой воздухоподвода. Питающее сопло / является измеритель 1ой осью датчика и связано с валом, угловое нололсение которого (см. фиг. 3) необходимо преобразовать в давление газа. Приемное сопло 2 неподвижно закреплено относительно корпуса 3. На торцовых поверхностях приемного п питающего сопел со смещением Б (см. фиг. 3) относительио оси вращения подвижного сопла находятся выходы рабочих каналов 4 и 5. К соплу / через канал 6 под давлением подается воздух, который, истекая из канала 5 в торцовый зазор, попадает также в приемный канал 4, где энергия воздуха вновь преобразуется в потенциальную энергию давления. Давление газа в приелшом канале однозначно определяется величиной перекрытия каналов 4 и 5 в плоскости торцов сопел / и 2. Нредельиое значение измеряемого угла определяется величиной смещения Б и диаметром рабочих каналов 4 и 5. Крутизна сигнала и потери давления в датчике оиределяются величиной давления питания и зазором В (см. фиг. 3), одновремеицо наличие постолнных утечек через зазор В определяет отсутстт. е. независимость лавлен111я питания от перекрытия площадей каналов 4 и 5.
Предмет изобретения
Пневматический датчик угла поворота, содержащий расположенные :в корпусе поворотное питающее сопло и приемное сопло, «а торцовых поверхностях которых выполнены рабомне каналы, отличающийся тем, что, с целые
увеличения пределов измерения углов и обеспечения иезавнсимости расхода газа через датчик от величины измеряемого угла, в нем оси питающего и приемного канала параллельны оси вращения питающего сопла и смещены относительно нее на величину, выбираемую в зависимости от диаиазона измеряемых углов.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПНЕВМАТИЧЕСКОЕ УНИВЕРСАЛЬНОЕ ЛОГИЧЕСКОЕУСТРОЙСТВО | 1969 |
|
SU241796A1 |
| Пневматический датчик угла поворота | 1977 |
|
SU657243A1 |
| Пульсатор | 1983 |
|
SU1191628A2 |
| Способ бесконтактного определения направления вращения и измерения скорости вращения объекта | 2024 |
|
RU2831667C1 |
| Гидроусилитель | 1979 |
|
SU872799A1 |
| УСТРОЙСТВО для ПРЕОБРАЗОВАНИЯ СИГНАЛА ХРОМАТОГРАФА | 1969 |
|
SU247607A1 |
| ДАТЧИК СКОРОСТИ ВРАЩЕНИЯ | 1970 |
|
SU284463A1 |
| ПНЕВМАТИЧЕСКОЕ СУММИРУЮЩЕЕ УСТРОЙСТВО | 1969 |
|
SU238224A1 |
| ПУЛЬСАТОР Б.С. ЛОБАНОВА (ВАРИАНТЫ) | 2002 |
|
RU2240449C2 |
| ПРЕОБРАЗОВАТЕЛЬ УГЛА ПОВОРОТА В ПНЕВЛ\АТИЧЕСКИЙ СИГНАЛ | 1972 |
|
SU348780A1 |
Фиг. 1
Риг.2
