Изобретение относится к области дискретной Пневмоавтоматики и предназначено для построения различных логических схем управления.
Известны дискретные пневматические элементы для построения логических схем, например мембранные и струйные. Однако в дискретных элементах мембранных систем наблюдается громоздкость построенных на базе их элементов различных однотактных и многотактных схем, при этом многие даже простейшие (однотактные) схемы либо полуактивны, либо пассивны (один из уровней выходного сигнала формируется непосредственно коммутированием канала выхода с одним из входных каналов). В мембранный релейной технике УСЭППА для фиксации нулевого состояния и обеспечения устойчивости конечных состояний в конструкции элементов используется пружина либо дополнительно предусматривается два промежуточных уровня управляющего сигнала 0,3 Р тт 0-6 РПИТ , что усложняет конструкцию и уменьшает удобства использования этой техники. Элементы струйной техники чувствительны к нагрузке, трудоемки с точки зрения технологии, требуют многокаскадного усиления на выходе и т. п. При этом для всех известных релейных элементов гшевмосистем (мембранных и струйных) характереп общий недостаток: стирание иамяти, например при отказе источника питапия.
Предложенное пневматическое универсальное логическое устройство содержит плату, управляющие сопла, выполненные вертикально к плате, фиксирующее сопло с развитой торцовой поверхностью, плоский уравновешенный рычаг с осью и заслонками, выполненными перпендикулярно его плоскости, и уиорным винтом, канал нитания, входные и выходные каналы и отличается тем, что с целью расширения функциональных возможностей в нем канал питания соединен с соплами питания и с фиксирующим соплом, выходные каналы соединены с выходными соилами, а входные каналы в зависимости от вида реализуемой функции связаны с уиравляющими соплами.
Целью настоящего изобретения является создание универсального и унифицированного пневмомеханического устройства (элемента) упрощенной конструкции, повышенной надежности со свойством автоматического восстановления логической памяти после устранения отказов источника питания, обеспечивающего реализацию полного комплекта одновходовых и двухвходовых функций с активным выходом унифицированного значения.
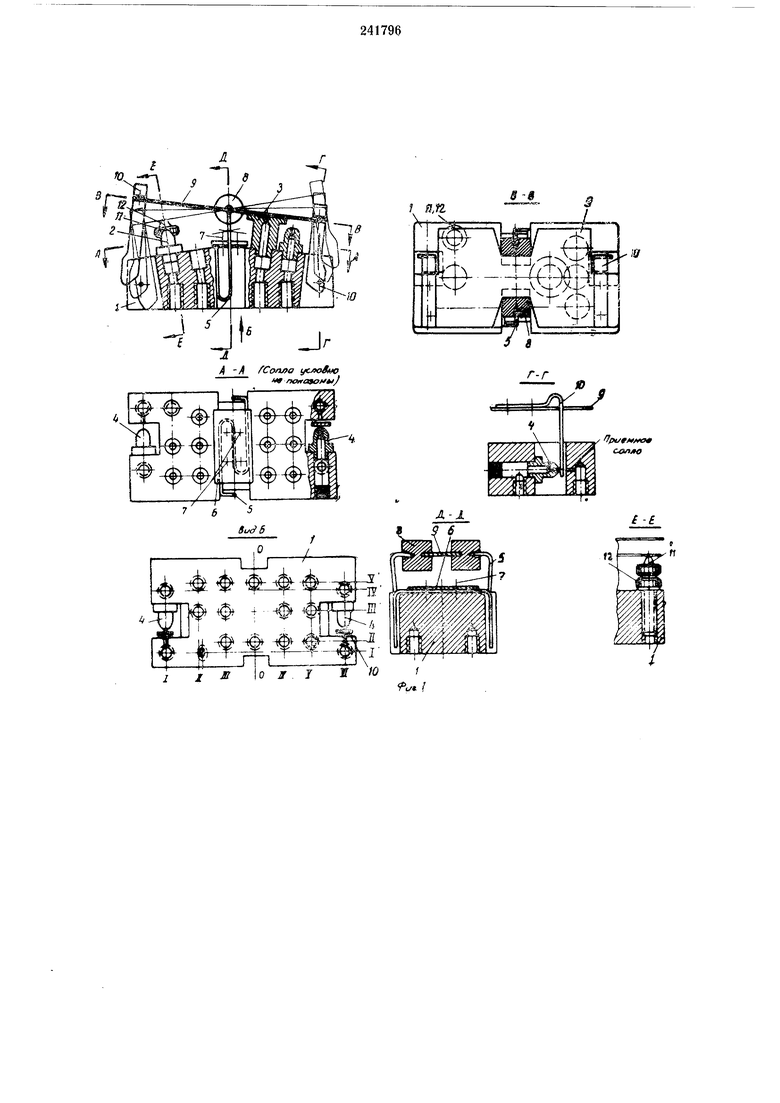
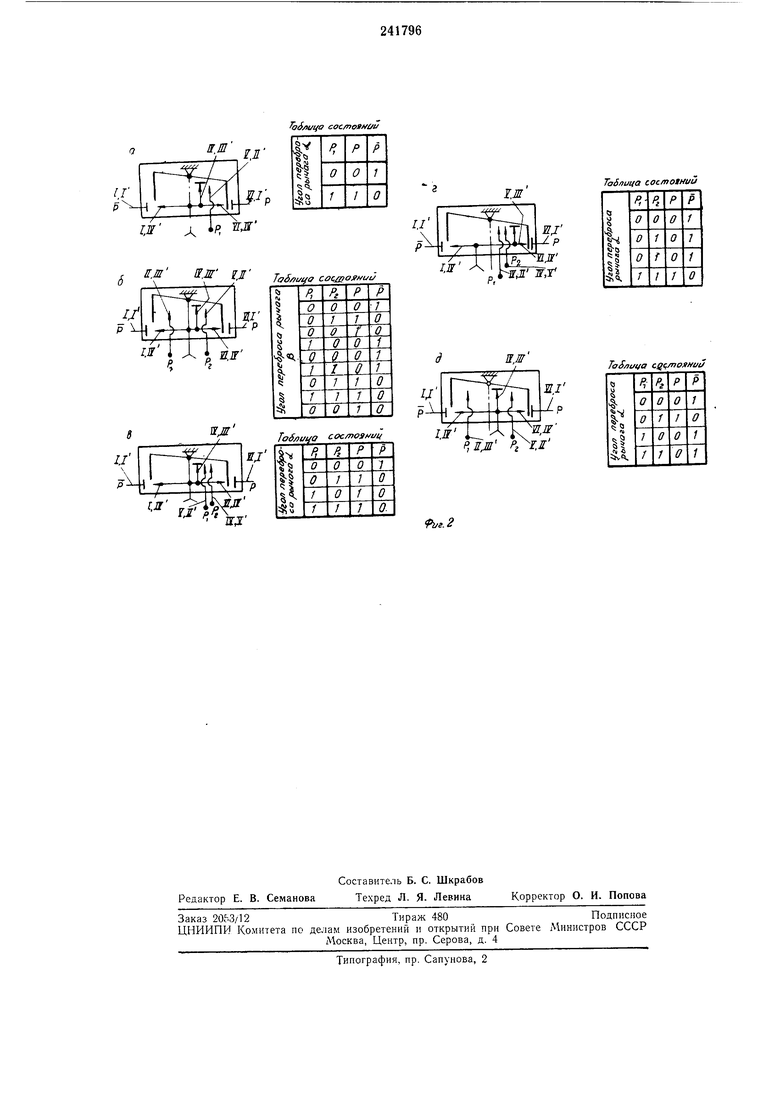
На фиг. 1 приведено описываемое устройство; на фиг. 2,0-д - схемы реализации логических функций двух независимых переменных
на основе описываемого устройства, а также соответствующие таблицы состояний (фиг2,а - схема реализации функции «Повторение (Да): P PI, инверсная функция «Отрицание
(HeJ: фиг. 2,6 - схема реализации эле гeнтa иамяти (или статического триггера с двумя раздельными входами); фиг. 2,в - схема реализации функции «Дизъюнкция (ИЛИ): , инверсная функция - «стрелка Пирса или «функция Даггера Р Р -Рг, фиг. 2,2 - схема реализации функции «Конъюнкция (И): Р Р , инверсная функция-«Штрих Шеффера : Р фиг. 2,(Э - схема реализации функции «Занрет : Р Р21 Р{, инверсная функция - «Импликация Р ).
Устройство (см. фиг. 1) состоит из несуш,ей нлаты /, рассчитанной нод печатный монтаж, на которой в унифицированных гнездах устанавливаются в определенных количествах в зависимости от реализуемой функции управляющие входные сопла - командные бесторцовые сопла 2 и специальное управляющее торцовое сопло 3, выполненное с достаточно развитой по площади плоской поверхностью торца круглого сечения. Кроме того, с двух сторон в назах платы смонтированы две пары сопел, каждая из которых состоит из питающего и приемного сопла 4. Последнее выполнено непосредственно в плате / устройства в виде дросселя. Питающее сопло 4 отличается от командного сопла 2 только тем, что выходное отверстие сопла 4 больше выходного отверстия сопла 2. Приемные сопла формируют два выходных сигнала - прямой и инверсный. В упругой проволочной цапфе 5, которая крепится с номощью плоской накладки 6 к плате 1 двумя винтами 7, свободно качается на упорных «ножевых подшипниках 8 плоский рычаг 9, уравновещенный относительно оси качания и являющийся исполнительным элементом устройства. На противоположных концах коромысла закреплены тонкие щторки 10, которые при конечных иоложениях коромысла соответственно перекрывают (открывают) доступ потоку струи из питающих в приемные сопла. На плате смонтирован также специальный винтупор 11с. контргайкой 12 для регулировки и фиксации предельного угла переброса исполнательного рычага 9. Другим фиксированным и неподвижным упором рычага является торцовое управляющее сопло 3.
Для обозначения координат сопел 2 приняты римские цифры, причем двухзначное число с занятой между цифрами, написанное над чертой, является условной координатой раснолол ения на плате устройства соответствующего входа или выхода того или иного сопла (см. фиг. ) Первая цифра - номер вертикали, вторая - номер горизонтали. Точка пересечения указанной вертикали с соответствующей горизонталью является центром соответствующего отверстия входа или выхода на плате устройства.
На фиг. 2 приводятся другие условные обозначения:
Р (а) -угол переброса исполнительного рычага, по величине несколько больщий (меньший) критического, PI и PZ- входы командные, Р к Р - выходы прямой и инверсный соответственно.
На фиг. 1 показан план (снизу) несущей нлаты / устройства. Ось О-О является осью симметрии платы. Ось качания исполнительного рычага 9 совпадает в плане с осью О-О. На пересечении вертикальных осей I и VI с горизонтальной осью / находятся два вь1хода устройства: инверсный Р и прямой Р (условное цифровое обозначение этих выходов соответственно /, / и W, /). На пересечении вертикальных осей / и У/ с осью IV находятся входные отверстия сонел 4 (условное обозначение /, IV и VI, /У). На пересечении вертикальных осей // и /// (по одну сторону оси О - О),/Уи V (по другую сторону оси О-О) с горизонтальными осями //, /// и V находятся входные отверстия управляющего и командных сопел 3 и 2 (по три отверстия на каждой из четырех вертикалей, за исключением второй, на которой только два отверстия) с условными обозначениями соответственно: //, /// и //, V- ///, //, III, HI и ///, У; IV, 1Г; IV, иг и /I/, V- V, 1Г- V, ill и V, V. Два резьбовых отверстия по оси О-О служат для и уплотнения платы устройства к плате монтажной. В зависимости от реализуемой функции от двух неременных сопла монтируются сверху платы на соответствующих наклонных плоскостях платы. Устройство работает следующим образом.
При подключении и нодготовке устройства к работе на торцовое управляющее сопло 3 и на сопла 4 питания подается сжатый воздух питания (пит 1,4 кгс/см). Командные сигналы равны «О, т. е. на командные входы сопла 2 устройства сигналы еще не поданы, при этом щторки 10 исполнительного рычага 9, в соответствии с его положением на фиг. 1, формируют два выходных сигнала устройства: в правой его части щторка 10 перекрывает поток струи от питающего к приемному соплу, вследствие чего на правом выходе Р устройства сигнал равен О (нрямой сигнал). В это же время в левой части устройства щторка 10 отведена от оси сопел - на левом выходе Р сигнал равен 1 (инверсный сигнал). Плоскость качающегося исполнительного рычага 9 опирается о плоскость торца управляющего сопла 3. В этом положении эти две плоскости параллельны (или почти параллельны). Поток сжатого воздуха, поданного на управляющее торцовое сопло (ось которого направлена перпендикулярно плоскости исполнительного коромысла), устремляясь в цространство, т. е. в узкий зазор между плоскостями коромысла и торца сопла, создает там вследствие аэродинамического явления разрежение.
Таким образом, плоскость коромысла притягивается к плоскости торца управляющего сопла за счет эжекции в зазоре между ними, обеспечивая устойчивость начального (конечного) состояния устройства. Таков статический режим работы устройства (установившийся режим).
В переходном режиме работу устройства можно проследить на примерах реализации одновходовых функций: «Повторение и «Отрицание (инверсия), а также ячейки логической памяти или статического триггера с раздельными входами. Предварительно регулировочным винтам 11, которым устанавливается заданный угол переброса исполнительного рычага 9, настраивается и фиксируется докритиЧеский угол а, т. е. такой угол ею переброса, при котором усилие эффекта аэродинамического притяжения надежно действует на коромысло даже тогда, когда оно находится в крайнем дальнем от торца управляющего сопла 3 положении.
При подаче сигнала на вход Р устройства через командное бесторцовое сопло2 с плечом установки большим, чем плечо установки торцового управляющего сопла 5, результирующий момент на коромысле поворачивает его против часовой стрелки до упора о винт 11. При этом правая щторка 10 открывает приемное выходное сопло и на правом выходе Р появляется сигнал 1. На левом выходе Р в этот момент появляется сигнал 0. При снятии с входа Р командного сигнала момент на коромысле от воздействия усилия эффекта притяжения перебрасывает коромысло назад по часовой стрелке до упора о торец управляющего сопла; правая шторка перекрывает приемное сопло, на нравом выходе устройства появляется сигнал О («Повторение). На левом выходе устройства при этом появляется сигнал 1, т. е. реализуется инверсная функция «Отрицание.
Реализация элемента логической памяти или статического триггера с раздельными входами осуществляется следующим образом: условно в исходном положении плоскость исполнительного коромысла онирается о плоскость торца управляющего сопла и притягивается к нему в силу аэродинамического эффекта притяжения (вход этого сопла постоянно запитан). Предварительно регулировочным винтом, которым устанавливается заданный угол переброса исполнительного коромысла, настраивается и фиксируется такой угол его переброса р, который несколько превосходит предельный (критический) угол а. При подаче на вход Р командного сигнала (импульса номинального давления) рычаг 9 под воздействием результирующего крутящего момента, направленного против часовой стрелки, соответственно поворачиваться. В момент достижения им положения, при котором расстояние между точкой плоскости коромысла и центром плоскости торца управляющего сопла 3 станет равным пли будет чуть более критпческого (при повороте на угол чуть более а), постоянное действие аэродинамического эффекта притяжения коромысла потомом струи к торцу
управляющего сопла мгновенно превращается в эффект отталкивания коромысла скоростным напором этой же струи. Происходит как бы реверс воздействия потока струи торцового сопла на коромысло, и теперь уже поток
струи этого же сопла не притягивает, а отталкивает коромысло до упора о винт //, ирижимает его к упору, фиксируя новое противоположное положение коромысла. При этом соответствующи сигнал па выходе Р как бы запоминается и остается неизменным независимо от состояния соответствующего командного сигнала на входе Р. Аналогично осуществляется переброс исполнительного коромысла в исходное состояние при иодаче, например,
комапдного импульса на другой вход PZ через другое бесторцовое командное сопло, расположенное спмметрично относительно оси рычага на противоположной части илаты. Таким образом, с иомощью оппсанного механизма достаточпо просто и наделано реализуется дискретная логическая память, т. е. фпксация двух конечных состояний устройства.
Следует также отметить, что расход воздуха через специальное торцовое сопло прп его
работе в режпме «притяжение естественно меньше (сопло прикрыто плоскостью коромысла), чем расход воздуха через него нри работе в режиме «отталкивание скоростным напором струи (плоскость коромысла приподнята.
сопротпвленпе потоку струи отсутствует). Переходный процесс работы устройства осуществляется релейно.
П Р е д м е 1- изобретения
45
Пневматическое универсальное логическое устройство, содержащее плату, управляющие соила, выполненные вертикально к плате, фиксирующее сопло с развитой торцовой иоверхностью. плоский уравновешенный рычаг с осью и заслонками, выполненными перпендикулярно его плоскости, и упорным винтом, канал питания, входные и выходные каналы, огличающееся тем, что, с целью расшпрения
функциональных возможностей, в нем канал питания соединен с соплами пптан1 я и с фиксируюшим соплом, выходные каналы соедииены с выходными соплами, а входные каналы в зависимости от вида реализуемой фуикции
связаны с управляющими соплами. ..-Юх.-f-Чi. .- ТДДОЦr Jt fP-f- /-к j - ч-1-4
1У л f,
j- ил SM 71
TaSautfo cocgjoifHtjij
0
уд
Тобличо состоянич
sjIf
4.
Таблица состояний
, W,y
ToS/iuva сустоят
f;iji
T/.
ЖЖ
.2

| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ МАШИНЫ | 2002 |
|
RU2234185C1 |
| ПНЕВМОГИДРАВЛИЧЕСКАЯ СТРУЙНАЯ ЦИФРОВАЯ | 1967 |
|
SU205102A1 |
| ПНЕВМАТИЧЕСКАЯ СИСТЕМА ДИСТАНЦИОННОГО | 1969 |
|
SU254355A1 |
| УСТРОЙСТВО ДЛЯ ОРИЕНТИРОВАНИЯ ДЕТАЛЕЙ | 2005 |
|
RU2305619C1 |
| Устройство для управления механизмом намотки | 1978 |
|
SU716959A1 |
| СПОСОБ УПРАВЛЕНИЯ ГТД | 2017 |
|
RU2638497C1 |
| ПНЕВМАТИЧЕСКИЙ КОНТАКТ | 1973 |
|
SU428117A1 |
| СТРУЙНЫЙ ТРИГГЕР СО СЧЕТНЫМ ВХОДОМ | 1971 |
|
SU307398A1 |
| СТРУЙНЫЙ ТРЕХПОЗИЦИОННЫЙ РЕГУЛЯТОР | 2004 |
|
RU2274883C2 |
| ЦИФРОВОЙ АНАЛИЗАТОР ВРЕМЕИНЫХ ХАРАКТЕРИСТИК ТРАНЗИСТОРНЫХ СХЕМ | 1971 |
|
SU297011A1 |