Изобретение относится к области приборостроения.
Для определения координат точек графиков Б известных устройствах, содержаш,их два датчика координат X, Y, размещенных на карданном подвесе и регулируемых посредством ручки управления, необходимо проводить точную калибровку шкалы устройства, что затруднительно при большом числе делений шкалы, и обеспечивать линейность шкалы.
Предлагаемое устройство с целью упрощения конструкции и коррекции нелинейности шкал датчиков снабжено подключенным к выходам датчиков координат X, Y двухкоординатным зеркальным электроизмерительным устройством, центр сферической системы которого совмещен с центром карданного подвеса датчиков координат, выполненного в виде внутренней неподвижной и двух наружных подвижных полусфер, причем на одной из последних укреплены корпуса датчиков координат, подвижные элементы которых соединены тягами с наружной иодвижной и внутренней неподвижной полусферами, а ручка управления датчиками жестко соединена с наружной подвижной полусферой, что обеспечивает ей две степени свободы при управлении датчиками.
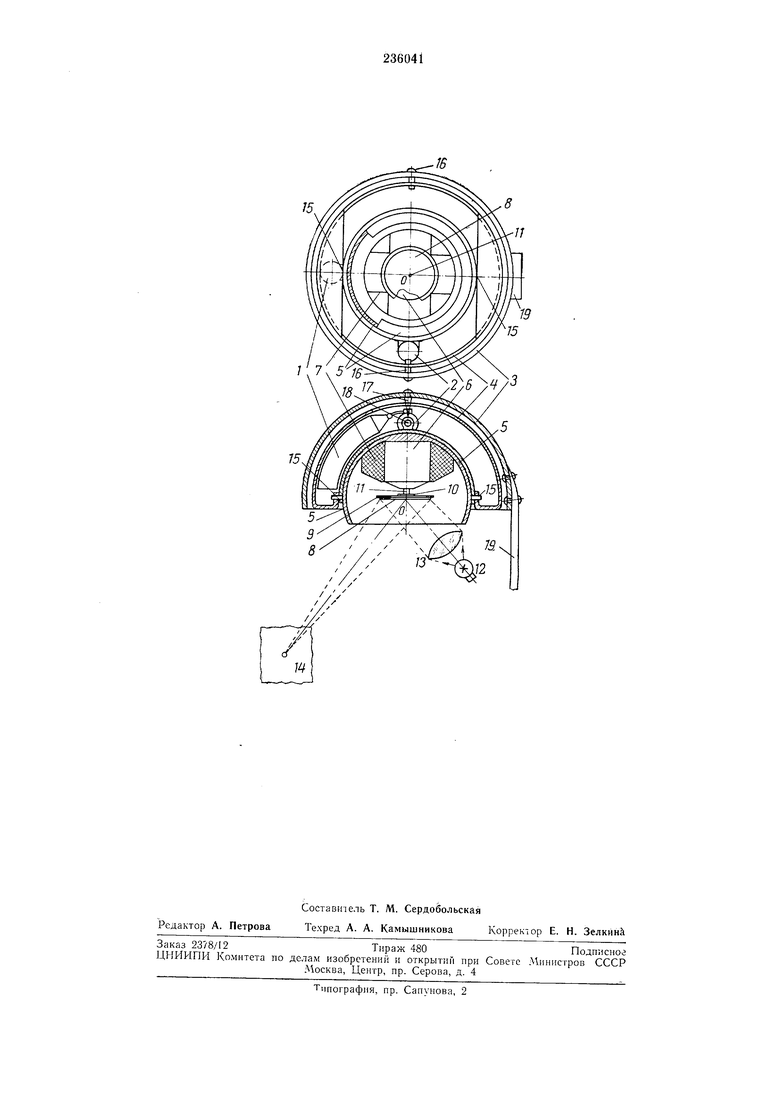
Оно содержит датчики /, 2 координат А , Y, карданный подвес, выполненный из двух подвижных полусфер 3, 4 и неподвижной полусферы, к которой крепптся сферическая магнитная система двухкоординатного зеркального электроизмерительного прибора 5.
Постоянный магнит 6 закреплен в полусфере магнитопровода при помош,и латунного кольца 7.
Подвижная система прибора состоит из подвижной рамки (на чертеже не показана), фиксирующего зеркальца 8, жестко укрепленного на основании подвижной части 9, которое оборудовано агатовым подшипником 10. Этот
подшипник укреплен с двумя степенями свободы на стальном керне // двухкоординатного электроизмерительного прибора, расположенном в центре О сферической магнитной системы прибора.
При помощи осветителя 12, линзы 13 и фиксирующего зеркальца 8 на передаваемом документе 13 создается контрольная световая метка, например оптическое изображение точечной кольцевой нити накала лампы осветителя 12 в виде светлого кольца диаметром в 1 -1,5 мм с черным пятном в центре диаметром около 0,5-0,7 мм.
Корпус датчика / координаты X жестко закреплен на полусфере 4, а подвижная часть датчика прп помощи тяги соединена со стойкой /7, прикрепленной к иолусфере 3 карданного подвеса.
Корпус датчика 2 координаты У также жестко закреплен на полусфере 4, но подвижная часть датчика присоединена при помощя тяги к стойке 18 на неиодвижном основании прибора 5.
Центр карданной системы совмещен с пентром сферической магнитной системы двухкоординатного зеркального электроизмерительного прибора.
При изменении положения ручки уиравлеНИН 19 по оси X иолусфера 3 карданного подвеса перемещается на полуосях 16 вокруг полусферы 4, что вызывает изменение состояния датчика / коордииаты X, а при изменении положения ручки 19 ио оси Y обе полусферы 3 11 4 перемещаются на полуосях /5 относительно ненодвижного основания прибора 5, что вызывает изменение со стояния ;1,атчика 2 координаты У.
Сигналы координат X, Y ч выхода датчиков {или с выхода схемы) подаются на отклоняющие катушки контрольного двухкоординатного электроизмерительного прибора 5, что вызывает соответствующее перемещение световой метки на документе 14.
Поскольку нелинейности шкал датчиков косфдинат (и электрического тракта схемы)
слияют на показания приоора, то они автоматически корректируются ири визуальном совлгещеиии контрольной световой метки с заданной точкой документа.
Датчики координат должны обладать достаточно большой разрешающей способность)о, а пеобходимость в калибровке датчиков отпадает.
Предмет изобретения
Устройство для определения координат точек графиков, содержащее два датчика координат X, У, размещенных на карданном подвесе и регулируемых посредством ручки управленпя, отличающееся тем, что, с целью упрощения конструкции и коррекции нелинейности И1кал датчиков, оно снабжено подключенным к выходам датчиков координат X, У двухкоордииатным зеркальным электроизмерительным устройством, иентр сферической системы которого совмещен с центром карданного подвеса датчиков координат, выполненного в виде внутренней неподвижной и двух наружных подвижных полусфер, на одной из которых укреплены корпуса датчиков координат, подвижные элементы которых соединены тягами с наружной подвижной и внутренней неподвижной полусферами, а ручка управления датчикам; жестко соединена с наружной подвижной полусферой, что обеспечивает ей две степени свободы при управлении датчиками.
15