Известен способ измерения амплитуды вибраций лопаток турбомаипшы неподвижными датчиками, например с помощью электроннолучевого устройства «Элура для измерения вибраций лопаток турбомашнны или с помощью стробоскопа.
Измерение амплитуды вибраций лопаток невозможно в тех случаях, когда частота колебаний равна частоте вращения маииты или кратна ей, т. е. в случаях резонансных внбраций, потому что к неподвижнолп- датчику или вспышке стробоскопа контролируемая лопатка приходит всегда в одной и той же фазе и. кажется неколеблющейся. Между тем измерение амплитуды резонансных колебаний весьма важно, так как во многих случаях именно эти колебания представляют наибольшую опасность.
Описываемый способ состоит в то:м, что постепенно изменяют скорость вращения вала и, начиная с того момента, когда изменение скорости вращення вызовет перемещение изображения контролируемого объекта, фиксируют эти перемещения при продолжающемся изменении скорости вращения вплоть до момента, когда изобрал ение займет первоначальное положение, и затем измеряют расстояние между крайними зафиксированными положениями, которое принимают за изображение амплитуды резонансных колебаний.
Это позволяет пзмерять амплтттуду вибраилй лопаток, частота которых кратиа частоте вращения вала мащины.
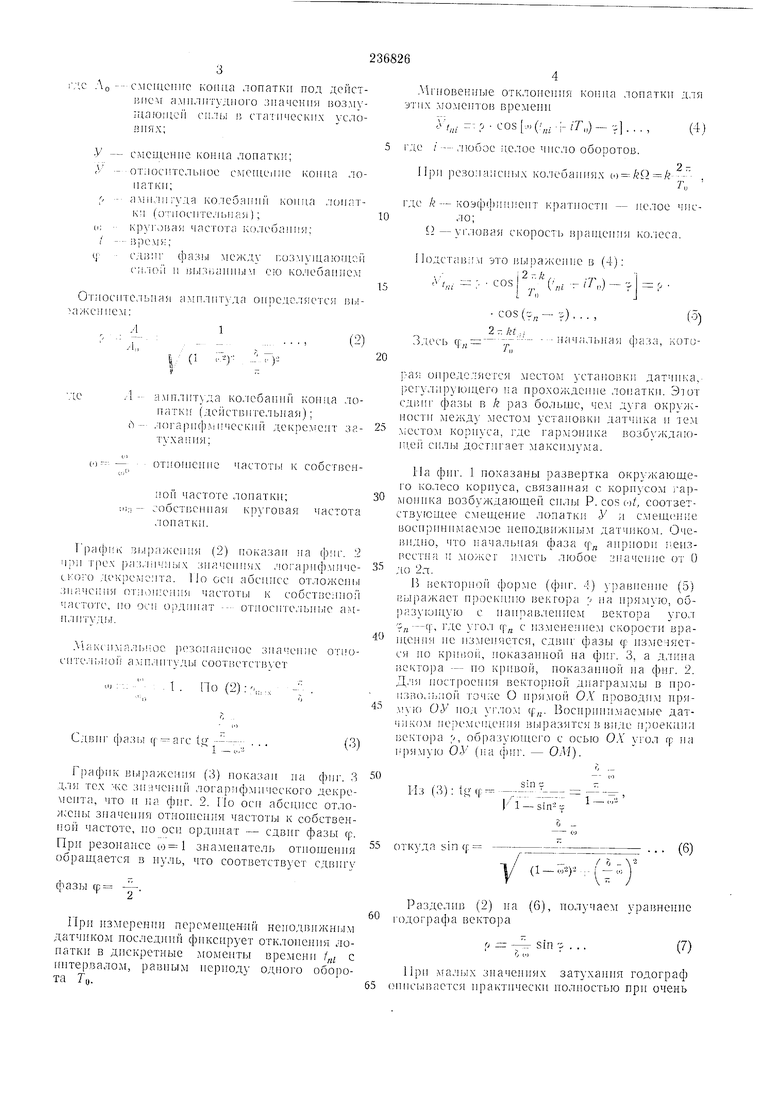
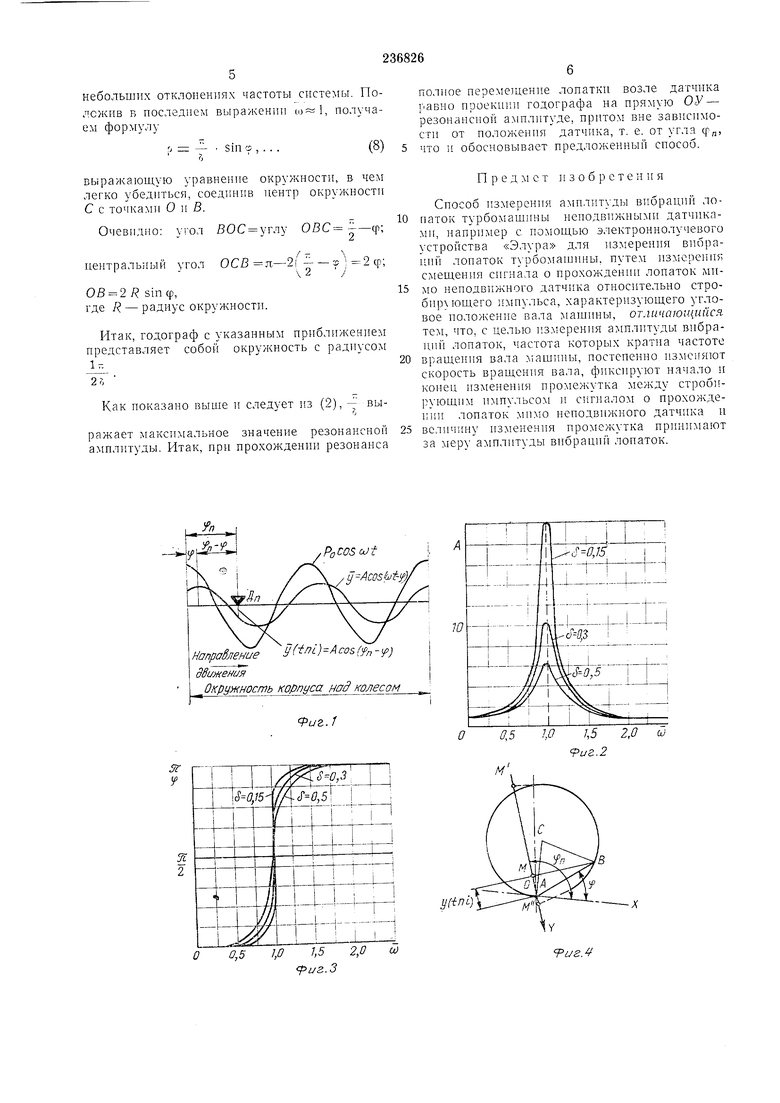
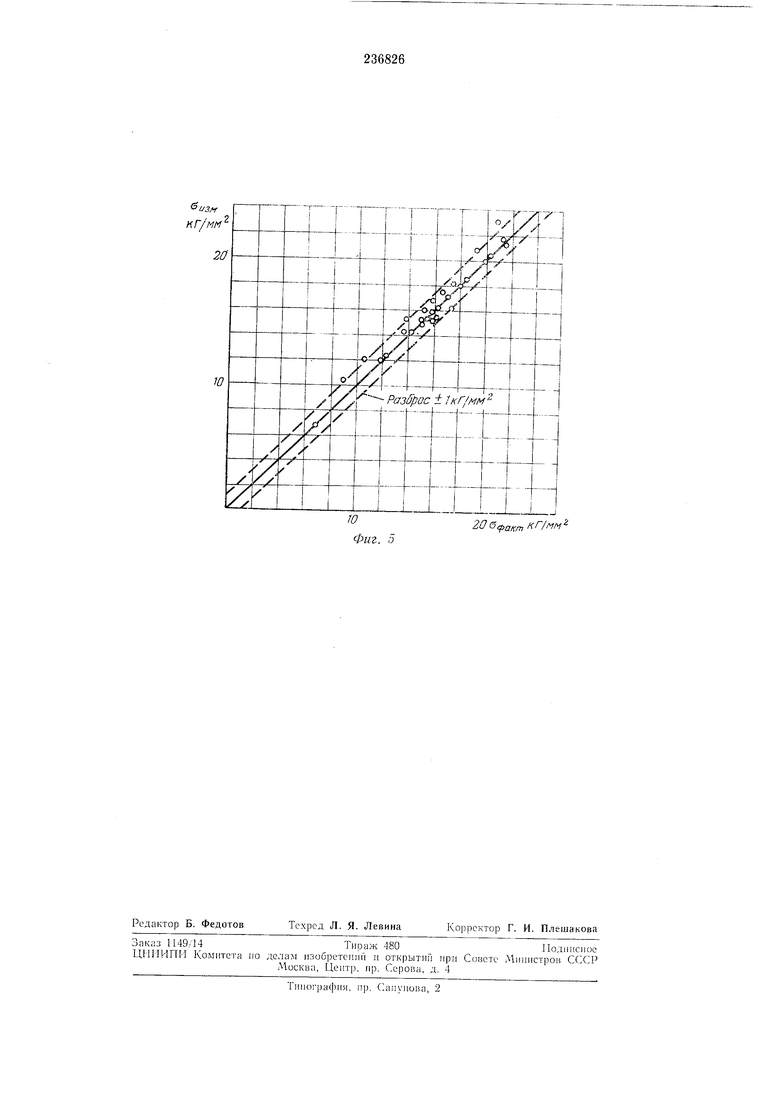
Па фиг. 1 показаны развертка корпуса машины, расположение вдоль нестационарной возмущающей силы и распределение вдоль неустановившегося смещения контролируемого объекта, например лопатки рабочего колеса, вызванного возмущающей силой, в положение, неподвижное относительно корпуса датчика; па фиг. 2 представлены амплитудночастотные характернстики при различных степенях успокоения; па фиг. 3 - фазово-частотные характеристики при тех же степенях успокоепия; на фиг. 4 показана амплитудно-фазовая характеристика в векторной форме; па фиг. 5 дано эксиери.ментальное сопоставление измеренных описанным способом амплитуд с измеренными с иомощью наклеенных тензодатчиков иапряженпями материала лопаток турбомашпны.
Рассматривая контролируемый объект, например лопатку турбомашины, как колебательную систему с одной степенью свободы li дe пфиpoвaниeм, пропорциональным скорости, имеем известное рещенне уравнения движения;:.-с АО-У - У - амн.лм гуда колеоанин кониа ,кл1птки (сг-1юсите,1ьная );10 о; - кр)ч)вая частота ко.:1еба1П1я; / - - : рел1и: ({ - сдвиг фазы г;озму1цаюи1.сн силоГ: и вызванным ею колсбаннем Относительная амилит да онреде.тяется isi) 1жениел1: - --(} ,1- -- . - - |/(1 ;-)- -Y 0 ч/1- амплитуда колебании кониа ло(0- OTHOHieiiiie частоты к собственион частоте лоиаткп;30 (ii.i - собст1 еииая круговая частота .юиатки. rpacjiKK выражения (2) ноказан на ф;и-. 2 при трех ра: Л 1Чиы зиачеинях /югарнф.миче- 35 ского .текремс.ита. По оеи абеипес отлол еи1 1 значения птио1неиия чаетоты к собстнедион частоте, но осн --- относительные а;чfiiiy-ььь .-: , ()i: x , . Сдвнг фазы tf-arc ttj .(3) 1 .; График выражения (3) иоказан на фнг. 3 50 для тех же значений логарифмичеекого декре гента, что и на фиг. 2. По оен абснисс отло/ ;ены значення отионюиия чаетоты к еобетвениой чаетоте, ио оеи ординат -- едвпг фазы ср. При резонансе ( знаменатель отпогпеипя обращается в ПУЛЬ, что соответствует счвнг фазы (р . ,-, При измерении перемепи- ний неподвижритм датчиком последний фпксирует отклоиепия ло2540 45 34 cMcincnire конца лопатки под дсйст-Мгновенные отклонения конца лоиатки для iMicAr ал1нлнтуд1101 о значения воз.му-этих мо.ментов времени смсшенне кониа лопатки;„ отлоснтельное смси1ение кониа ло-При резопансн1,1х колебаниях :А --иатки; 236826 рая оиределяегся .местом устаио 5ки датчика,регу.тиру1О1дего на прохо 1 дсиие лоиатки. Этот сд|Ш1 фазы в k раз больше, чем дуга окру/кностн между местом установки датчика и те.м местом корнуса, где гармоника возбуждаюH,,eii енлы достигает :макснд1ума. ,., ф„,. j показаиы развертка окружающего колесо корпуса, связанная с корнухюм гармоинка возбуждающей снлы Р. cos о/, соотзетствуюидее смеи{енне лопатки -У и смещение восирииимаемое ненодви/кпым датчиком. Очевидно, что начальная фаза (р„ анриоои иеизвестиа и любое З1 ачение от О д,, 2л. И векторион форме (фиг. 4) уравнение (5) выражает ироекиию векгора на нря.мую обра.зугонгую с наиравлением вектора угол 1ДС угол гр„ с из.менен1 ем скорости вра1деи и-1 ие изменяетея, сдвнг фазы (f пз: 1ечяетси но KpHisoii, ноказаннои на фиг. 3, а длина BCKTOj a -- ио кривой, иоказаиной на фиг. 2. Для ностросиия векторной диагра.ммы в прон.зволь-иой точхе О нря.мой ОХ проводим пряд,...(, Q,y ,,дд углом (р„. Воспринимае ые д.атчяко.м 11е1Нмеи1,ення выразятся в виде ирд)еки11и образуюигегс с осью O.Y угол гр иа прямую ОУ (на фиг. - Ощ. д;,-,,. Из (3): (р- ----- 7 -;: I1--sin -f 7Г откуда sin (р - zrr:i r ::rz-::::z r (6) 1/ ,-, -..у .V у (L )- :- I ) Г азделив (2) иа (6), получаем уравнение годографа вектора о гг sin -f . ..(7) небольших отклонениях частоты снстемы. Полсжив Б последнем выражении (, получаем формулу Р . sin , .. .(8) выражающую уравнение окружности, в чем легко убедиться, соединив нентр окружности С с точками О н В. Очевидно: угол ВОС углу центральный угол ОСВ л,-2| -- -f 2 ф; 08 2 R з1пф, где R - радиус окружности. Итак, годограф с указанным приближением представляет собой окружность с радиусом , Как показано выше н следует из (2), 4 выражает максимальное значение резонансной амплнтуды. Итак, нрп прохождении резонанса 5 10 15 20 25 полное иеремещенне лопаткп возле датчика равно проекнни годографа па прямую ОУ - резонансной амплнтуде, притом вне завнсимости от положенпя датчика, т. е. от угла ф„, что и обосновывает предложенный способ. Предмет изобретения Способ измерения амнлитуды вибрапий лопаток турбомагннны неподвижными датчикпмн, например с помощью электроннолучевого устройства «Элура для измерения вибраций лоиаток турбомашины. путем измерения смещения сигнала о ирохождении лопаток мпМО ненодвнжного датчика относительно стробир 1ощего импульса, характеризующего угловое иоложенне вала машины, отличающийся тем, что, с целью из.мерения амплитуды вибраций лопаток, частота которых кратпа частоте вращешш вала ;aшины, постепенно нзмсняют скорость вращения вала, фиксируют начало и конец изменення промежутка между строб)пчощим импульсом н сигналом о прохождении лопаток мимо неподвижного датчика и величииу изменения промежутка пр1и-1имают за амплитуды вибрацпи лоиаток.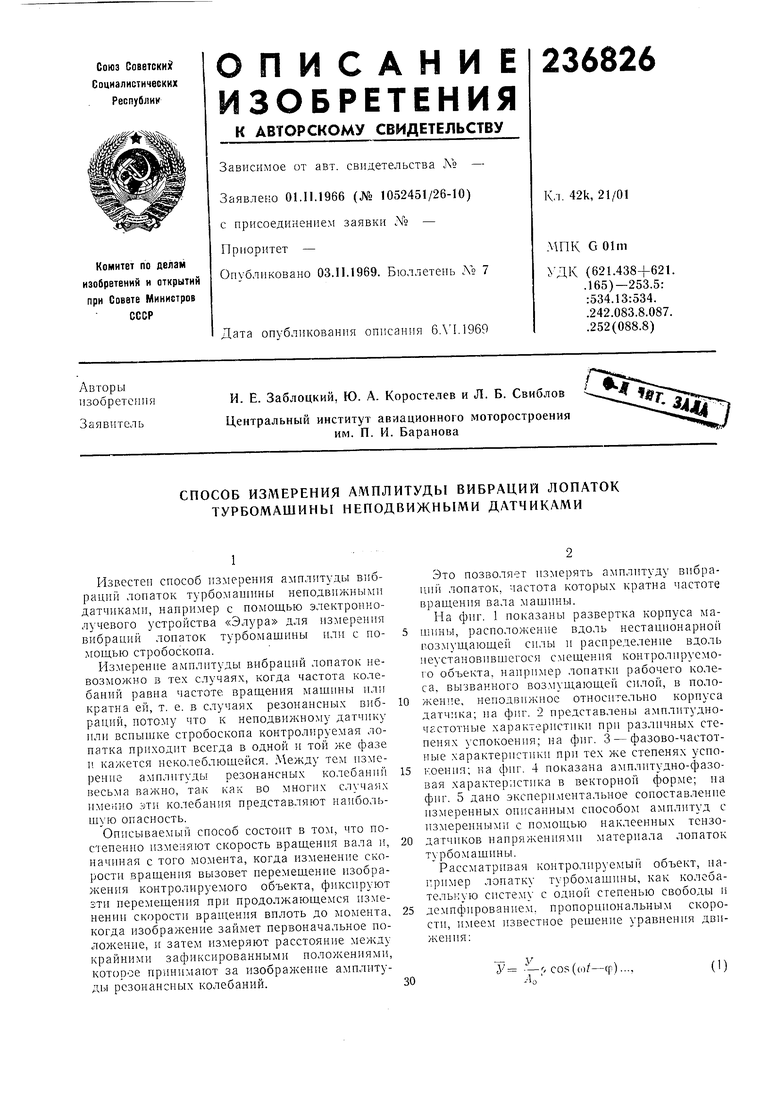
Направление У( cos (Уп - f) dSi/Mef i/я кружность корпуса над колесом
fuz.t
О /7,5 10 1,5 2,0 ш иг.2
М
Ij(inL)
L/Зм
КГ/ММ
ZOe aKmXr/MM
