Известен датчик системы телеуправления автономного прибора для каротажа в процессе бурения, выполненный в виде турбогенератора, который реагирует на изменение рас.хода жидкости и формирует сигналы управления прибором.
Известны автономные управляемые приборы для каротажа скважин в процессе бурения, аппаратура которых по сигналам управления, посылаемым с поверхности, включается на измерение и регистрацию. Известны также способы привязки диаграммы к глубине скважины, при которых измерение и регистрация идут непрерывно, а сигналы, посылаемые с поверхности, отмечаются на диаграмме как марки глубины.
Один из способов телеуправления скважинным прибором состоит в том, что сигнал телеуправления формируется изменением расхода промывочной жидкости.
В одном из известных вариантов приема сигналов телеуправления в качестве датчика приемника сигналов телеуправления, представленных изменением расхода жидкости, используется автономный турбогенератор - источник питания аппаратуры скважинного прибора, т. е. изменение скорости вращения турбогенератора при изменении расхода жидкости формирует сигнал управления в виде излгенения напряжения, снимаемого с генератора.
В случае же житания автономного прибора от сухих элементов необходимо вводить в аппаратуру турбогенератор-датч1 к сигналов управления.
Такой датчик конструктивно сложен (турбина, генератор, уплотнение вала между турбиной и генератором и др.) и малонадежен.
На время спуска автономного прибора в буровой инструмент его аппаратуру отключают от источника питания, чтобы избежать бесполезного расхода энергии и диаграммной ленты. Для включения аппаратуры в момент бурения используют реле времени, настроенное на определенный момент. При таком способе включения время включения аппаратуры расходится, и иногда значительно, с временем бурения. При наращивании и подъеме инструмента аппаратура продолжает работать.
В предлагаемом датчике задающий элемент состоит из вертушки с осью, подвижно размещенной в скользящем подшипнике, и гофрированной мембраны, жестко и герметично соединенной с осью вертушки и корпусом датчика. Исполнительный элемент состоит из гибкого контакта и двухобмоточного соленоида.
сигналов телеуправления независимо от глубины скважины. Наряду с этим угфощается конструкция датчика и иовышается его надежность.
Ьа оси вертушки, с целью повышения четкости срабатывания датчика, предусмотрен ограничитель враш,ения.
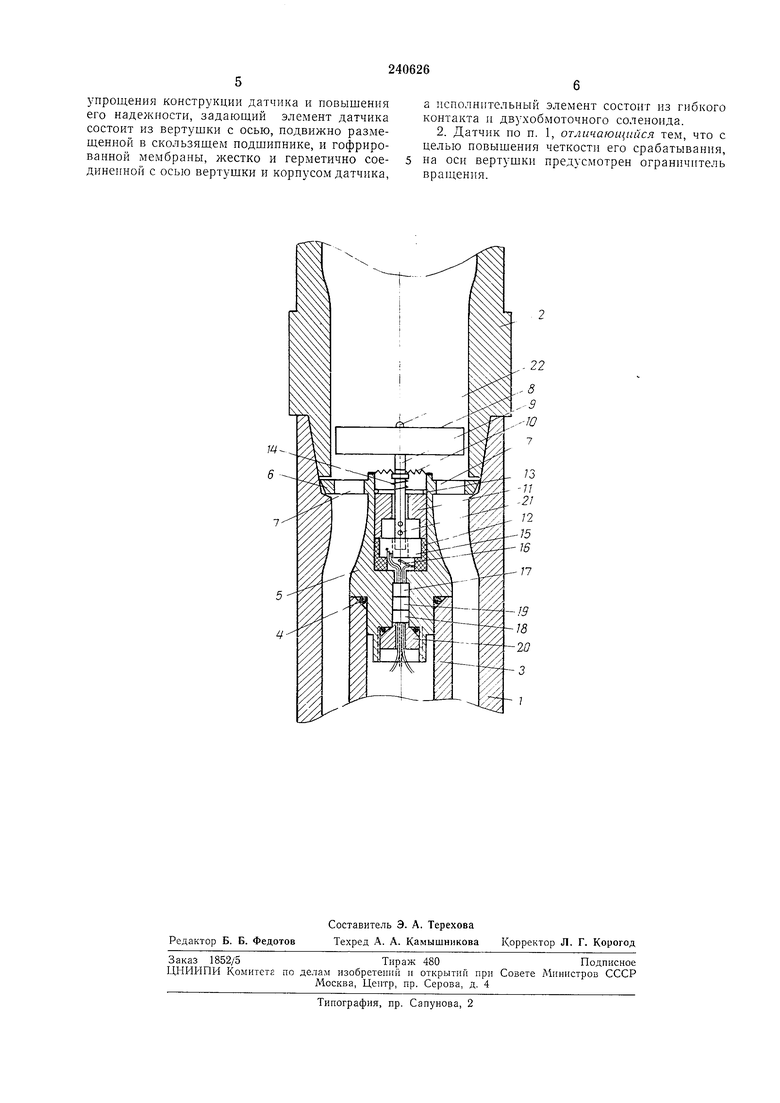
На чертеже изображена головка автономного скважинного прибора с датчиком ириемника сигналов управления.
Между иатрубком /, находяи1,имся в призабойиой части колонны бурильных труб, и трубой 2 подвешивают автономный скважинный ирибор.
Головка автономного ирибора выполнена в варианте, ири котором датчик монтируется в ней. К головке же кренится шасси с аииаратурой автоиомного ирибора, которая заш,иш,ена от попадания раствора прочным корпусом 3 с уплотнением 4 (резиновое кольцо).
Головка скважинного прибора состоит из корпуса 5 и диска 6 для иодвески ирибора с отверстиями 7 для прохождения глинистого раствора.
В выточке в верхней части корпуса 5 расположен датчик, состояш,ий из вертушки (ротор турбины) 8 на оси Я ироходяш,ей через мембрану W, которая герметично нрииаяна к корпусу и к оси 9.
При использовании мембраны из резины места соединения ее с валом и корпусом уплотняются самим материалом мембраны.
Ось 9 из ферромагнитного материала проходит через металлическую втулку 11, опирающуюся на втулку 12 из изоляционного материала, которая сидит на дне выточки корпуса 5. Обе втулки фиксируются распорным пружинным кольцом 13. Между втулкой // и выступом на оси 9 в зоне мембраны находится иружина 14, работающая па сжатие.
Нижний конец оси 9 расположен внутри двухобмоточного соленоида 15. На изоляционной втулке 12 укреплен контакт 16. Провода от соленоида 15 и контакта 16 проходят через групповое сальниковое уплотнение, состоящее из стекловолокнистых пробок 17 и 18 и резиновой иробки 19.
В каждой пробке имеется отверстие под диаметр проводов, которые проходят в аппаратуре скважинного прибора. Г1робки поджимаются гайкой 20 с отверстием по центру для прохождения проводов.
Такие групповые уплотнения в скважинных геофизических нриборах допускают работу при больших давлениях.
Внутреннюю полость датчика заливают непроводящей и несжимаемой жидкостью через отверстия внутри оси с выходом в полость датчика через окна 21 и входом в верхнем торце оси, закрываемым после заливки уплотняемым винтом 22.
Принцин действия датчика сводится к следуюплему.
До прокачки раствора мембрана 10 находится в среднем нейтральном положении. Вес вертушки (ротора турбины) уравновешивается иружиной 14.
При прокачке бурового раствора ротор 8 турбины испытывает два усилия: осевое и касательное к окружности ротора. Первое усилие стремится опустить ось 9, а второе - повернуть ротор. Второму усилию нренятствует жесткость мембраны, которая имеет гофры в виде концентрических кругов, т. е. мембрана способна работать на изгиб, но не на закручивание.
Усилие, стремящееся опустить ось 9, после оиределенного смещения оси, определяемого расходом (скоростью) жидкости, уравновещивается силой сжатия пружины 14. При этом
мембрана прогибается в средней части и выпучивается в части, прилегающей к корпусу. При применении двух мембран первая только прогибается, а вторая - выгибается. Пружину 14 рассчитывают так, что при минимально возможном для бурения расходе жидкости ось 9, коснувшись контакта 16, включает ирибор.
При больших расходах жидкости ось 9, опускается ниже и отгибает контакт 16, не нарушив электрической связи с ним. Таким образом, при прокачке жидкости включается аппаратура автономного прибора.
При изменении расхода жидкости ось 9 изменяет свое положение внутри соленоида 15,
изменяя тем самым коэффициент взаимосвязи между его обмотками, и при этом генерируется импульс.
Приемное устройство реагирует не на абсолютное значение коэффициента взаимосвязи,
а на отношение двух коэффициентов взаимосвязи, заданных в определенном промежутке времени. При закодированной последовательности изменения расхода жидкости с выхода соленоида снимается кодированная носледовательность импульсов, которая, проходя через электронное избирательное устройство, в случае соответствия снятой последовательности импульсов заданной, включает аппаратуру автономного прибора на измерение и регистрацию или регистрирует метки глубины на диаграмме.
Предмет изобретения
1. Датчик системы телеуправления автономного прибора для каротажа в процессе бурения, предназначенный для включения аппаратуры автономного прибора и выделения сигналов телеуправления, представленных изменекием расхода жидкости, состоящий из корпуса, задающего и исполнительного элементов, отличающийся тем, что, с целью включения аппаратуры автономного прибора только при бурении скважины, выделения сигналов телеупупрощения конструкции датчика и повышения его надежности, задаюпдий элемент датчика состоит из вертушки с осью, подвижно размещенной в скользящем подшипнике, и гофрированной мембраны, жестко и герметично соединенной с осью вертущки и корпусом датчика.
а исполнительный элемент состоит из гибкого контакта и двухобмоточного соленоида.
2. Датчик по п. 1, отличающийся тем, что с целью повышения четкост его срабатывания, на оси вертушки предусмотрен ограничптель вращения.