Иззестяо устройство для управления мехатшзмамн папильонирования землесосного снаряда с напорным свайяым ходом, содержащее электрически связанные между собой курсовой гироскоп, пусковое приспособление,, датчики положения напорной сваи и грунтозаборного устройства.
Однако ручное переключение пусковых приспособлений для реверсирования двигателей папильонажных лебедок при достижении рабочим органом бровки прорези не позволяет сохранить прямолинейность прорези, кроме того, невозможно поддерживать пост оянн-ой ширину прорези, так как при работе землесосного снаряда оериодически изменяется радиус разработки.
Целью настоящего изобретения является обеспечение возможности автоматического поддерл аиия заданного направления и щирины разрабатываемой (Прорези при изменяющемся радиусе папильонирования.
Для этого пусковое приспособление выполнено в виде подвижных микропереключателей, управляемых курсовым гироскопом через следящую передачу и перемещаемых корректирующим звеном. Прнчем последнее люжет быть выполнено в виде дифференциальной сельсинной Передачи, в которой один сельсиндатчик связан с рамой грунтозаборного устроиства, а другой сельсин-датчик - с механизмом передвижения напорной сваи.
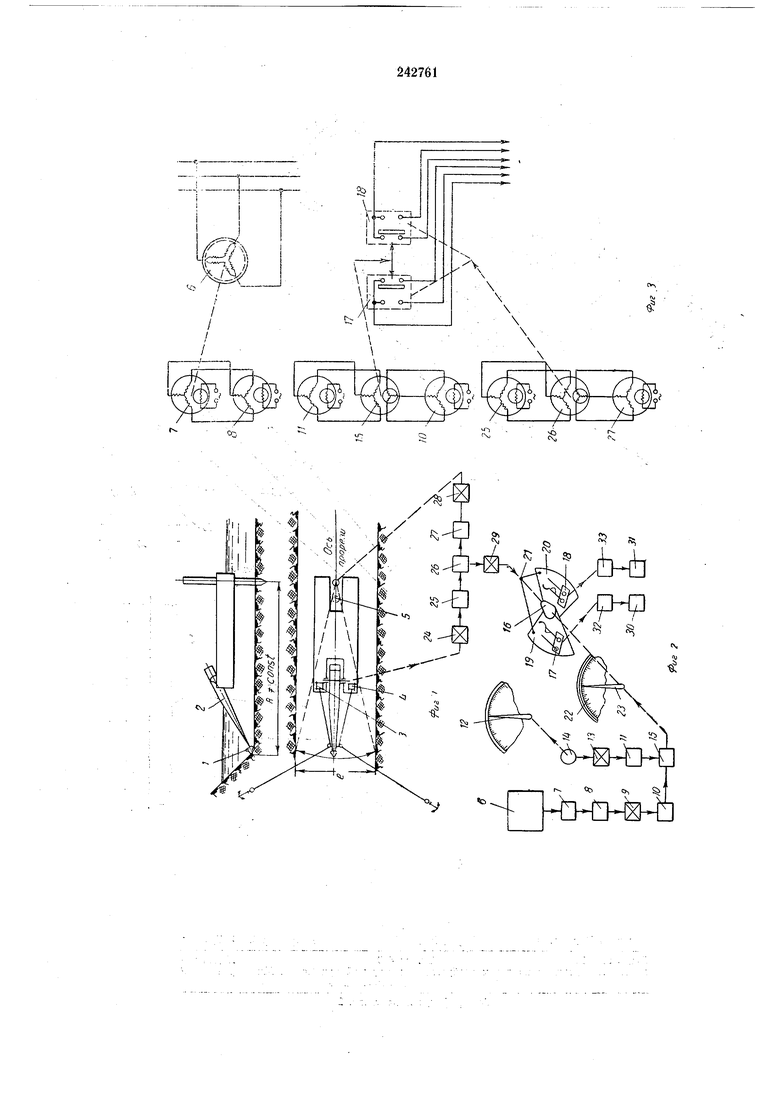
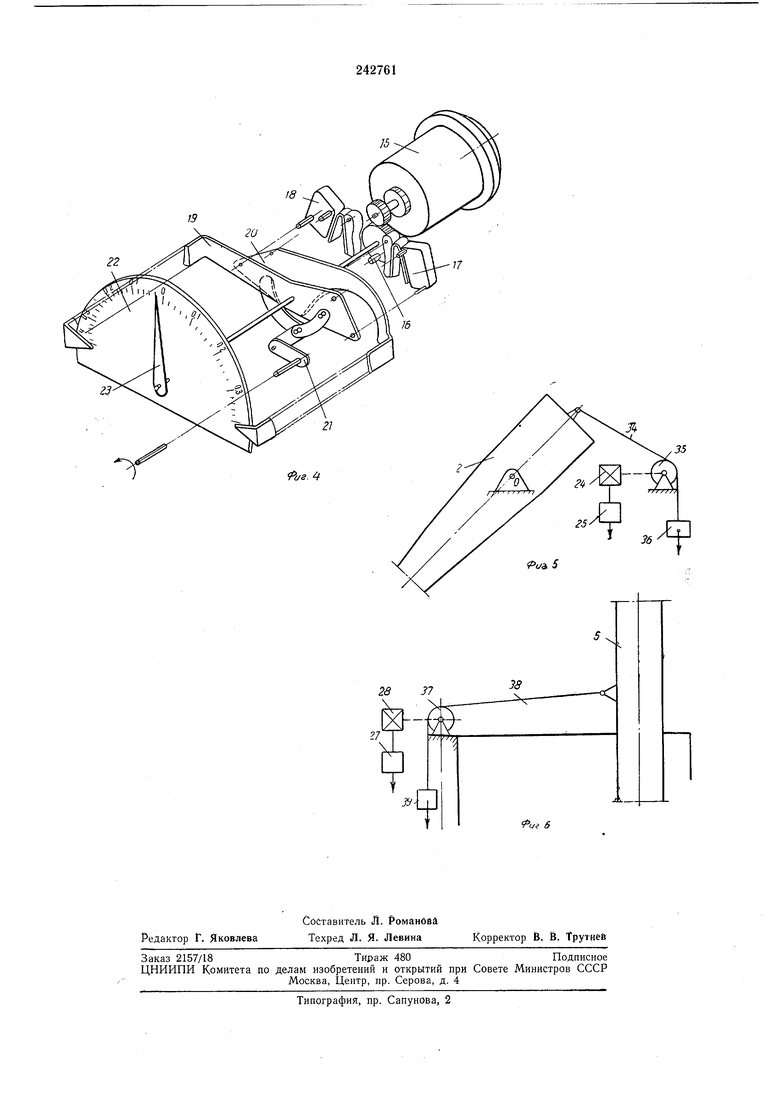
На фиг. 1 представлена схема землесосного снаряда со овайно-тросовым папильонированием и напорным свайным ходом; на фиг. 2- блок-схема устройства; на фиг. 3 - принципиальная электрическая схема управления напильонированием; на фиг. 4 - конструктивное исполнение узла подвижных микропереключателей и механизма задатчика; на фиг. 5- схема привязки сельсина-датчика к раме рабочего органа; на фиг. 6 - схема привязки сельсина-датчика к свае напорного хода. Землесосный снаряд содержит следующие
узлы: рабочий орган /, раму 2, несущую рабочий орган, правую папильонажную лебедку 3, левую лапильоналшую лебедку 4, сваю 5 напорного свайното хода. Устройство состоит из курсового гироскопа
6, снабженного для съема сельсиномдатчиком 7, сельсина приемяика 8 редуктора 9, сельсина-датчика 10, сельсина-датчика 11, стрелки-указателя 12, редуктора 13, ручкилимба 14, дифференциального сельсина-приемника 15, кулачка 16, микровыключателей 17, 18, поворотных плат 19, 20, механизма задатчика 21, шкалы 22 ширины прорези, стрелы-указателя 23, редуктора 24, сельсина-датчика 25, дифференциального сельсина-приемредуктора 29, двигателей 30 и 31 папильонал ных лебедок и пускателей 32 и 33 этих двигателей.
Корректирующее звено имеет тросик 34, ролик 35, груз 36, ролик 37, тросик 38 и груз 39.
Устройство работает Следующим образом.
Перед началом работы с помощью ручкилимба 14 по указаниям стрелки-указателя 12 через редуктор 13 ротор сельсниа-датчика 11 управляющей дифференциальной сельсиниой передачи устанавливают на нулшое направление прорези. С |ПО|Мощью задатчика 21 вручную ПО шкале 22 устанавливают заданную ширину / прорези. При этом 1выходной вал редуктора 29 должен оставаться неподвижным, а перемещаются только платы 19, 20 с микропереключателями 17, 18, устанавливав их симметрично среднему положению кулачка 16 .на иужно-м от кулачка расстоянии.
При работе земснаряда его рабочий орган / перемещается в горизонтальной плоскости попеременно вправо и влево от направления оси прорези вокруг сваи 5 по радиусу с помощью папильонажных лебедок 3, 4. Угол отклонения корпуса земснаряда от оси прорези отрабатывается курсовым гироскопом 6 и через следящую передачу (сельсины 7, 8) и редуктор 9 передается на сельсин-датчик 10 дифференциальной схемы, ротор сельсинаприемника 15 поворачивает кулачок 16 до взаимодействия с одним из микропереключателей 17 или 18, которые через пускатели 32, 33 реверсируют двигатели 30, 31. Стрелка 23 служит для визуального наблюдения за перемещением кулачка 16. При обратном ходе рабочего органа в его крайнем полол ении кулачок.У& воздействует на другой микропереключатель, происходит реверс двигателей.
Для изменения глубины прорези рабочий орган 1 перемещается в результате изменения наклона рамы 2. Радиус его перемещения вокруг неподвижной сваи 5 (так называемый радиус разработки R) изменяется, а при неизменной величине угла отклонения рабочего органа от оси разработки будет меняться ширина / прорези. Радиус разработки изменяется, также при действии свайного хода.
Для сохранения ширины прорези при действии указанных двух факторов в устройстве шредусмотрена коррекция угла отклонения рабоч его органа. Для этого к раме 2 (фиг. 5) на некотором расстоянии от оси качания О, со стороны, противоположной рабочему органу /5 -прикреплен тросик 34, перекинутый через ролик 35, установленный на корпусе земснаряда. На свободном конце тросика подвешен
груз 36. При изменении наклона рамы 2 тросик 34 перемешается, ролик 35 поворачивается и через редуктор 24 поворачивает ротор сельсина-датчика 25.
Вблизи свайного хода (фи-г. 6) на корпусе зе;мснаряда также установлен ролик 37, вал которого через редуктор 28 соединен с ротором сельсина-датчика 27. Через ролик перекинут тросик 38, один конец его прикреплен к
овае 5, а на втором подвешен груз 39. Перемещение корпуса земснаряда относительно сваи 5 приводит к повороту ротора сельсинадатчика 27. Сигналы сельсинов-датчиков 25, 27 суммируются на дифференциальном сельсине-приемнике 26. Ротор этого сельсина через редуктор 29, задатчик 21 перемещает платы 19, 20 с микропереключателями 17, 18 на угол, необходимый для компенсации изменения радиуса разработки R с целью сохранения заданной ширины / прорези.
Если с течением времени при работе землесосного снаряда наблюдается уход гироскопа, что ведет к отклонению оси прорези, в устройстве имеется возможность, не меняя
ориентации корпуса курсового гироскопа по отношению к корпусу земснаряда, исправлять накапливающуюся со временем ошибку на правления оси прорези. Для этого ротор сельсина-датчика 11 поворачивают с помощью
ручки 14 через редуктор 13.
Предмет изобретения
1. Устройство для управления механизмами панильонирования землесосного снаряда с напорным свайным ходом, содержащее электрически связанные между собой курсовой гиpOiCKon, пусковое приспособление, датчики положения напорной сваи и грунтозаборного устройства, отличающееся тем, что, с целью автоматического поддержания заданного направления и щирины разрабатываемой прорези при изменяющемся радиусе иапильонирования, пусковое приспособление выполнено в виде подвижных микропереключателей, управляемых курсовым гироскопом через следящую передачу и перемещаемых корректирующим звеном.
2. Устройство по п. 1, отличающееся тем, что корректирующее звено выполнено в виде диффереициальной сельсинной передачи, в которой один сельсин-датчик связан с рамой грунтозаборного устройства, а другой сельсиндатчик - с механизмом передвижения напорной сваи.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО для КОНТРОЛЯ РАБОЧИХ ПЕРЕМЕЩЕНИЙ ЗЕМСНАРЯДА СО СВАЙНО-ЯКОРНЫМ ПАПИЛЬОНИРОВАИИЕМ | 1969 |
|
SU244218A1 |
| Землесосный снаряд | 1984 |
|
SU1145094A1 |
| Земснаряд | 1978 |
|
SU825791A1 |
| Земснаряд с безьякорным папильонажем | 1978 |
|
SU688564A1 |
| Землесосный снаряд | 1985 |
|
SU1350269A1 |
| УСТРОЙСТВО ДЛЯ БЕЗЪЯКОРНОГО ПАПИЛЬОНИРОВАНИЯ ЗЕМЛЕСОСНОГО СНАРЯДА | 1991 |
|
RU2011757C1 |
| Землесосный снаряд | 1972 |
|
SU574506A1 |
| ЗЕМЛЕСОСНЫЙ СНАРЯД | 1970 |
|
SU284717A1 |
| Способ разработки грунта при строительстве каналов | 1983 |
|
SU1161630A1 |
| Землесосный снаряд | 1988 |
|
SU1645390A1 |
23 37 ,
{Т
6
