Известны устройства для контроля рабочих перемещений земснаряда со свайно-якорным папильонированием, включающие датчик угла поворота, датчик положения грунтозаборного органа и датчик положения напорной свап.
Цель изобретения - автоматизировать процесс измерения и поддержания необходимой ширины прорези, разрабатываемой земснарядом путем веерообразного новорота вокруг заколотой в грунт сваи при набираини-травлении папильонажных тросов. Достигается это тем, что в предложенном устройстве на выходном валу датчика угла поворота смонтирован своим механическим входом электромеханический множительный блок, соединенный своим электрическим входом с блоком, суммирующим электрические сигналы датчиков положения грунтозаборного органа, напорной сваи и сигнал длины корпуса земснаряда.
Для непрерывного умножения сигнала, пропорционального величине радиуса разработки, на синус угла поворота земснаряда мнолштельный блок может быть выполнен в виде спнусно-косинусного вращающегося трансформатора, обмотка статора которого включена на напряжение, лропорциональное радиусу разработки. Вал ротора жестко связан с выходным валом датчика угла поворота. Напряжение, нропорциональное фактическолму отклонению грунтозаборного органа от оси прорези, снимается с синусной обмотки ротора.
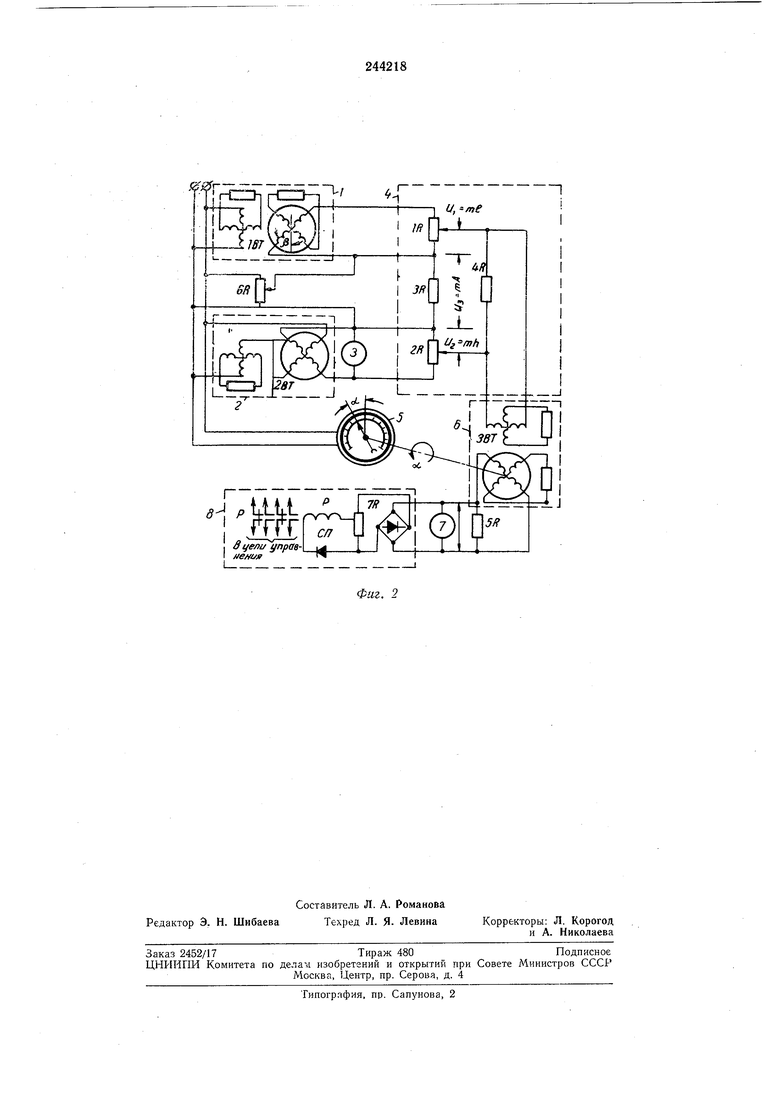
На фиг. 1 представлена схема свайного папильонирования земснаряда в двух проекциях; на фиг. 2 - принципиальная электрическая, схема устройства.
Как видно из фиг. 1, ширина прорези по дну при набирании-травленнн папильонажных тросов определяется расстоянием от осн напорной сваи до конца грунтозаборного органа (радиусом разработки и углом поворота корпуса земснаряда вокруг заколотой в грунт напорной сваи по выражению
B Psiny.(+A f/г) sm}.(Uos +A+kH)sim...
(1)
где;В - расстояние от оси до бровки прорези, м;
Р - радиус разработки, м;
а - угол поворота земснаряда
вокруг сван;
/ Lcosp - длина проекции рамы грунтозаборного органа на горизонтальную плоскость, .и;
Л const - длина корпуса згмснаряда между осью поворота грунтозаборного органа и крайним передним положением оси напорной сваи, м; h kH-сдвиг напорной сваи относительно крайнего переднего ее положения, м; Н - полный ход напорной
сваи, м;
О А 1 - коэффициент использования свайного хода.
В процессе разработки меняется не только угол а, но и радиус разработки. Последний изменяется при опускании-подъеме грунтозаборного органа (изменение глубины разработки) и при передвижке корпуса земснаряда вперед относительно неподвижной напорной сваи. Если земснаряд не имеет нанорного свайного хода, последнее слагаемое в выражении (1) отсутствует.
Предлагаемое устройство представляет собой вычислитель непрерывного действия, решающий уравнение (1) относительно ве аичины В.
Оно включает датчик 1 положения рамы грунтозаборного органа, датчик 2 положения напорной сваи, вольтметр-указатель 5 хода напорной сваи, суммирующий блок 4, угла поворота корпуса земснаряда - курсо;вой прибор 5, множительный блок 6, вольтметр-указатель 7 отклонения конца груитозаборного устройства от оси прорези и выходной релейный блок 8.
Датчик 1 выполнен с использованием серийного вращающегося трансформатора 1ВТ, включенного по синусно-косинусной компенсированной схеме с нагрузкой IR на косинусной обмотке ротора. Трансформатор 1ВТ закрепляется на раме, а вал его ротора соединяется с тяжелым свободно висящим маятником, благодаря чему угол поворота траисформатора 1ВТ будет соответствовать углу р наклона рамы к горизонту. Напрял ение на резисторе 1 будет изменяться при изменении глубины разработки по закону косинуса и изображать в определенном масщтабе т длину горизонтальной проекции рамы грунтозаборного органа:
и - k. р miLcos р , в,
где L/C - напрялсение питающей сети, в:
R-t -ПОСТОЯННЫЙ коэффициент трансформации вращающегося трансформатора;
mj - постоянный масщтабный коэффициент, в/м.
Датчик положения напорной сваи выполняется также с использованием вращающегося трансформатора 2ВТ, включенного по линейной компенсированной схеме на нагрузку 2R. Статор 2ВТ закрепляется на корпусе земснаряда, а вал его ротора соединяется с механизмом передвижения напорной сваи таким образом, чтобы полному ходу напорной сваи Н соответствовал поворот ротора 2ВТ на угол около-120°. В этом случае напряжение на резисторе 2R будет изменяться по линейному закону и изображать в определенном масштабе Ша сдвиг напориой сваи от крайнего пе|)едкего полол :ения:
2д , /По/еЯ m-2h, в, где /П2 - постоянный масщабный коэффициент, в/м.
Устанавливаемый на пульте управления вольтметр 5 со щкалой, градуированной в метрах, показывает величину сдвига напорной сваи. Включенные последовательно резисторы 1R, 2R, 3R и параллельный им резистор 4R образуют суммирующий блок 4, имеющий три входа и один выход. На входы этого блока по0 даются упомянутые выше напряжения U. и f/2, а также постоянное по величине нагфя жение, изобрал енное в масщтабе m длин) корпуса земснаряда А. Напряжение на выходе блока равно сумме иапрял ений, пода.вае5 мых со входов на резистор 4R и, следовательно, изображает в масштабе m длину радиуса разработки:
( 3 + и m(i + h + A} тР, а, где т - постоянный масштабный коэффиии
0ент, eJM.
Выбор масштаба т и приведение всех тре слагаемых к этому масштабу осуществляются цри помощи потенциометров 1R, 2R и 6R. Выходной вал датчика угла поворота земснаряда - курсового .прибора 5, в качестве которого используется серийный гидроскопический компас (авиационный автопилот), жестко связывается с валом ротора вращаюш,его трансформатора ЗВТ, образующего множи0 тельный блок 6.
Трансформатор ЗВТ включается по синуснокосинусной компенсированной схеме с нагрузкой 5R на синусной обмотке ротора. Поскольку на первичную обмотку 3JBT подается напряжение (/4 тР, изображающее длину радиуса разработки, а ротор ЗВТ поворачивается курсовым прибором 5 на угол а, равный углу поворота корпуса земснаряда, напрял-сение /5 на резисторе 5R:
и kfUiSin а sriia гпв В, в, где т в -постоянный коэффициент пропорциональности, в/м, т. е. изобралчяет в масштабе т отклонение груитозаборного устройства от оси прорези по вырал ению (1).
5 Выходной релейный блок 8 обесиеч 1вает иодачу импульсов в цепи сигнализации и управления по достил ении заданной положением движка потенциометра 7R максимальной величины f/5max в Дп;1Х1 что обеспечиваст автоматическое поддержание заданной ширины прорези. Для повышения точности срабатывания реле Р в цепь его катушки включен полупроводниковый стабилизатор СП, обладающий высоким постоянством напряжения пробоя
Установленный на пульте управления вольтметр 7 со шкалой, градуированной по масштабу m в в метрах, дает непрерывную информацию о положении грунтозаборного устройства относительно оси прорези.
Эффективность использования предлагаемого устройства состоит в том, что оно позволяет автоматизировать процесс управления земснарядом, в том числе и земснарядом с напорным свайным ходом и, повышая точность отработки прорези, обусловливает существенный экономический эффект за счет сокращения бесполезных переборов грунта за проектными границами прорези, составляющий при существующих методах эксплуатации не менее 5- 7% от всего перерабатываемого объема грунта.
Предмет изобретения
1. Устройство для контроля рабочих перемещений земснаряда со свайно-якорным папильонирован.ием, включающее датчик угла поворота, датчик положения грунтозаборного органа
и датчик пололсения напорной сваи, отличающееся тем, что, с целью автоматизации процесса измерения и поддержания необходимой ширины прорези, на выходном валу датчика угла поворота смонтирован своим механическим входом электромеханический множительный блок, соединенный своим электрическим входом с блоком, суммирующим электрические сигналы датчиков положения грунтозаборного органа, напорной сваи и сигнал длины корпуса земснаряда.
2. Устройство по п. 1, отличающееся тем, что, с целью непрерывного умножения сигнала, пропорционального величине радиуса разработки, на синус угла поворота земснаряда, множительный блок выполнен в виде синуснокосинусного вращающегося трансформатора, обмотка статора которого включена на напряжение, цропорциональное радиусу разработки,
вал ротора жестко связан.с выходным валом датчика угла поворота, а напряжение, пропорциональное фактическому отклонению грунтозаборного органа от оси прорези, снимается с синусиой обмотки ротора.


| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО для УПРАВЛЕНИЯ МЕХАНИЗМАМИ ПАПИЛЬОНИРОВАНИЯ ЗЕМЛЕСОСНОГО СНАРЯДА С НАПОРНЫМ СВАЙНЫМ ХОДОМ | 1969 |
|
SU242761A1 |
| Способ очистки каналов | 1982 |
|
SU1134672A1 |
| Устройство для управления земснарядом со свайным ходом | 1988 |
|
SU1601292A1 |
| Землесосный снаряд | 1984 |
|
SU1145094A1 |
| Земснаряд с безьякорным папильонажем | 1978 |
|
SU688564A1 |
| Земснаряд | 1978 |
|
SU825791A1 |
| УСТРОЙСТВО ДЛЯ ЗАБОРА ШЛАМА ИЗ ОТСТОЙНИКОВ | 1994 |
|
RU2117730C1 |
| Устройство для контроля управлениязЕМлЕСОСНыМ СНАРядОМ | 1979 |
|
SU840250A1 |
| Землесосный снаряд | 1972 |
|
SU574506A1 |
| Землесосный снаряд | 1978 |
|
SU866061A1 |
f 1 с„
I 8 tienu управ- пения
Фиг. 2
