Известные акселерометры компенсационного тила содержат магнитоэлектрические преобразователи, катушки которых одновременно являются инерционной массой нрибора. Объединение трех таких акселерометров в одном приборе с щелью одновременного измерения трех компонент вектора ускорения приводит к значительному увеличению габаритов прибора. Наиболее сложной частью трехкомнонентного акселерометра является иодвес подвпжной части прибора, который в значительной мере определяет характеристики и габариты прибора.
Предложенный трехкомпонентный акселерометр позволяет использовать компенсационный метод Измерения, уменьшить габариты датчика « осуществлять изменение характеристик прибора в незначительных пределах. Это достигается тем, что подвижная часть акселерометра образована тремя взаимно перпендикулярными цилиндрами, оси которых пересекаются в одной точке и на которых размещены 0;бмотки трех магнитоэлектрических преобразователей и трех датчиков перемещения. Подвес подвижной части прибора осуществлен 1при помощи четырех Г-образных скоб, которые одним своим концом прикреплены к краю одного из цилиндров подвижной части, а другим концом - к серединам четырех растяжек. Растяжки укреплены иа -корпусе прибора и образуют-квадрат.
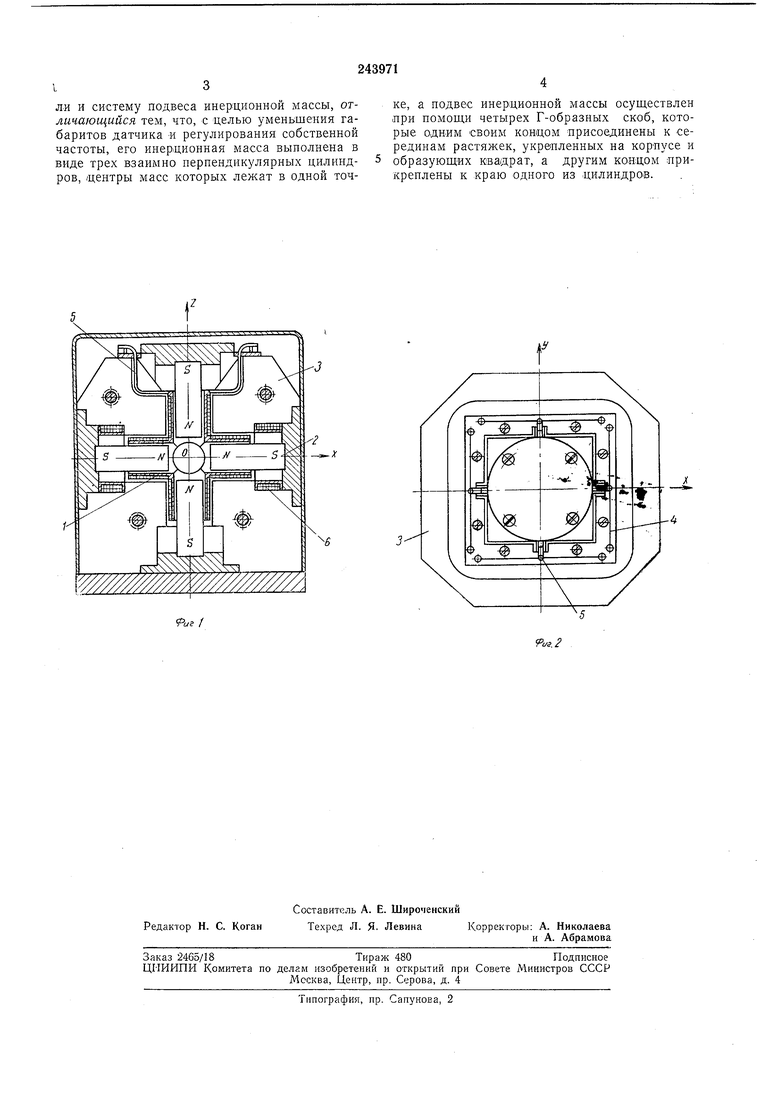
Па фиг. I схематически .изо1бражен разрез прибора в плоскости XOZ, а на фиг. 2 - прибор, вид сверху.
Подвижная часть / прибора образована тремя пересекающимися цилиндрами, на которых размещены катушки магнитоэлектрического преобразователя. Магнитоэлектрический преобразователь содерл ит постоянные магниты 2 и магнитопровод 5, являющийся частью корпуса прибора. Подвилшая часть прибора подвешена на растяжках 4 при помощи четырех скоб 5. В -качестве датчиков перемещения могут быть использованы индуюционные датчики, неподвижные обмотки 6 которых размещаются на неподвижной части прибора.
Особенность подвеса подвижной части прибора заключается в том, что для ускорений, направленных по оси Z, прибор работает как осевой акселерометр, а для ускорений, направленных по осям А и У, он является акселерометром маятникового типа. Использование подвеса на растяжках позволяет изменять собственную частоту прибора путем изменения натяга растяжек.
ли и систему подвеса инерционной массы, отличающийся тем, что, с целью уменьшения габаритов датчика и регулирования собственной частоты, его инерционная масса выполнена в виде трех взаимно перпендикулярных цилиндров, центры масс которых лежат в одной точке, а подвес инерционной массы осуществлен лри помощи четырех Г-образных скоб, которые одним своим концом црисоединены к серединам растяжек, укрепленных на корпусе и образующих квадрат, а другим концом прикреплены к краю одного из цилиндров.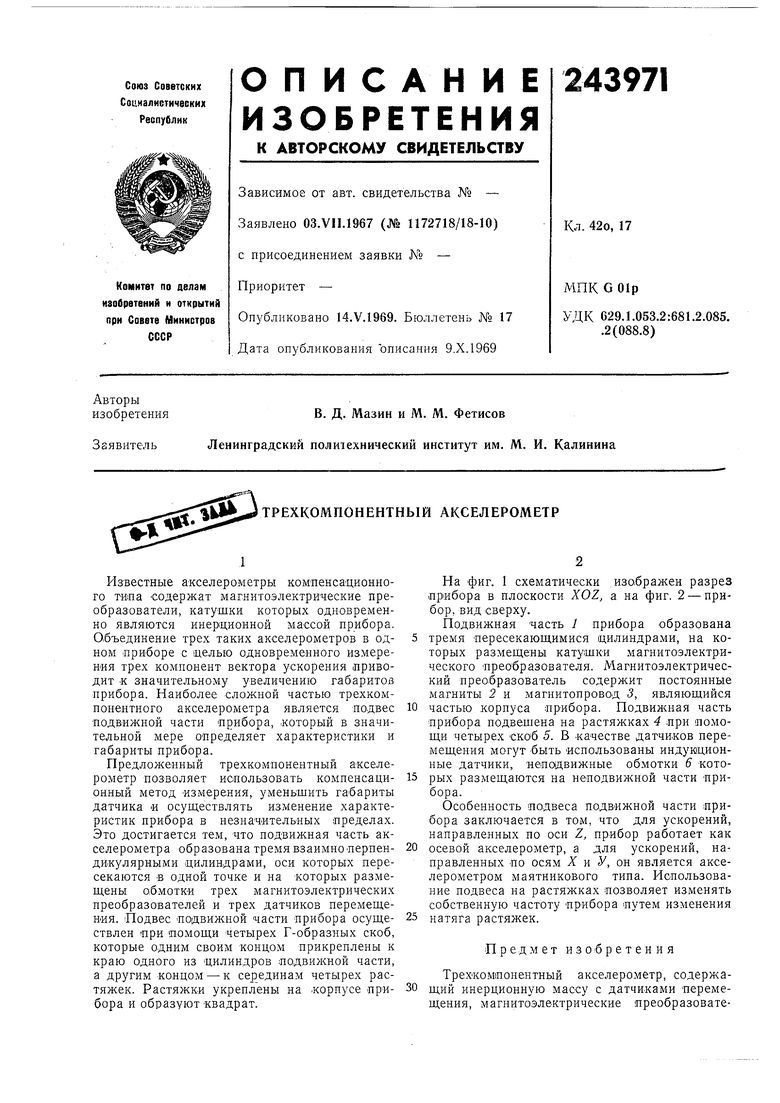
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМПЕНСАЦИОННЫЙ МАЯТНИКОВЫЙ АКСЕЛЕРОМЕТР | 2013 |
|
RU2559154C2 |
| СПУТНИКОВЫЙ АКСЕЛЕРОМЕТР | 2016 |
|
RU2627014C1 |
| КОМПЕНСАЦИОННЫЙ МАЯТНИКОВЫЙ АКСЕЛЕРОМЕТР | 2021 |
|
RU2758892C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 1993 |
|
RU2028000C1 |
| Двухкомпонентный акселерометр | 1974 |
|
SU502334A1 |
| АКСЕЛЕРОМЕТР | 1989 |
|
RU2046348C1 |
| Компенсационный акселерометр | 2017 |
|
RU2690708C2 |
| Компенсационный маятниковый акселерометр | 1982 |
|
SU1027627A1 |
| КОМПЕНСАЦИОННЫЙ МАЯТНИКОВЫЙ АКСЕЛЕРОМЕТР | 2013 |
|
RU2543708C1 |
| АКСЕЛЕРОМЕТР | 1977 |
|
SU1840378A1 |
иг /
