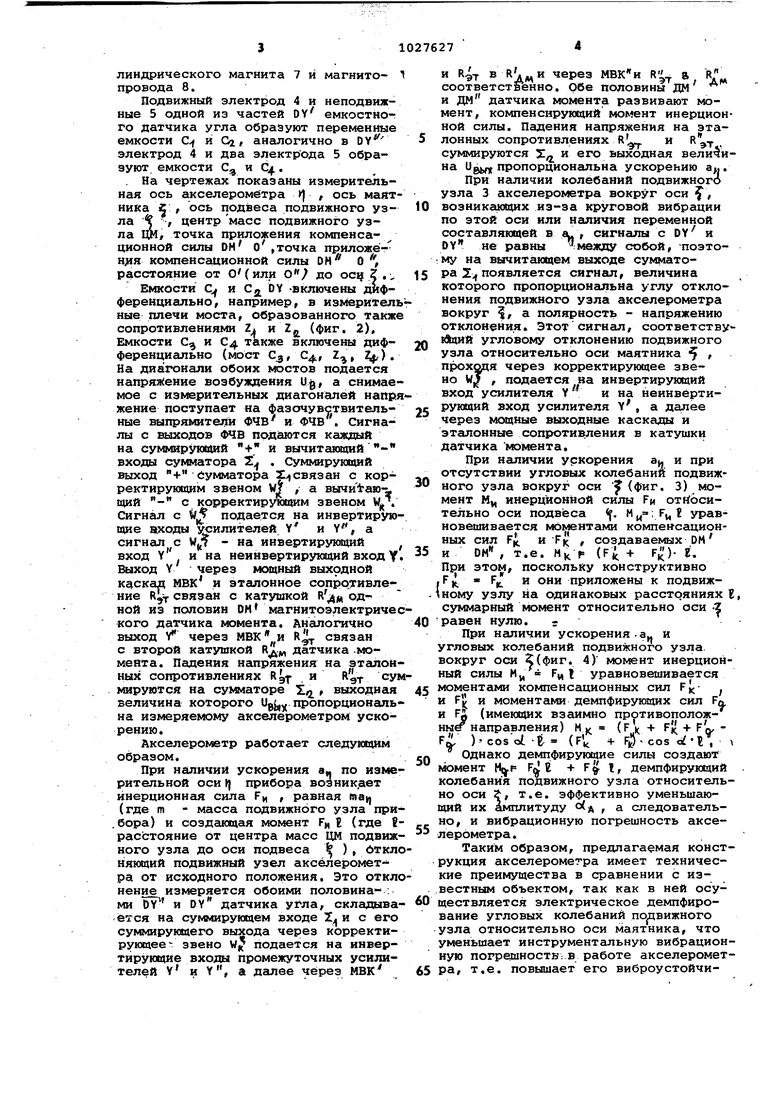
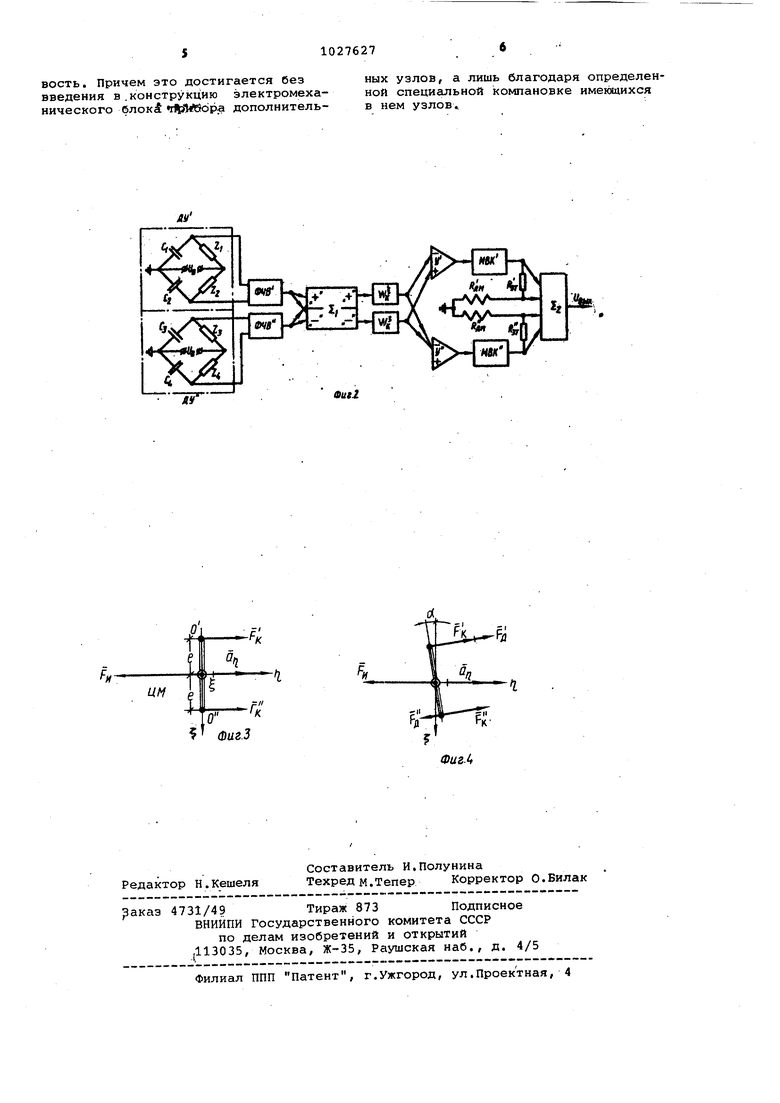
Изобретение относится к приборостроению, а именно к конструкциям датчиков линейных ускорений - акселерометров - инерциальнах систем навигации. Известна конструкция поплавкового маятникового акселерометра, состоящая из герметичного, заполненного рабочей жидкостью корпуса и взве шейного в ней поплавкового подвижно го маятникового узла, а также датчи ков угла и момента, соединенных через электронный усилитель flj. Помимо гидростатической разгрузк опор подвижного узла рабочая жидкость осуществляет его эффективное демпфирование при наличии как линей ной, так и угловой вибрации. Однако поплавковые акселерометры отличаются технологической сложное тью изготовления, имеют большие габариты, а прецизионные приборы с си темой термостатирования обладают, кроме того, значительным времейем готовности. Указанные недостатки устраняются в сухих маятниковых акселерометрах состоящих из корпуса и помещенного в нем на упругом подвесе подвижного узла, а также датчиков угла и момента, соединенных через электронный усилитель. Упругий подвес в таких акселерометрах выполняется из металла, его шейка имеет цилиндрическую или более сложную поверхность и формируется тщательной механической обработкой 123 . Недостат,ком акселерометров с таки типом упругого подвеса является весьма значительный гистерезис, приводящий к погрешности приборов порядка . Для устранения этого явления упругий подвес акселерометров выполняют из монокристаллов кварца или кремния, причем формирование балочки подвеса ведется химическим путем. Так, при изготовлении упругого подвеса из монокристалла кремния выполнение формы и размеров балочки осуществляется методом анизотрон ного травления З. Наиболее близким к предлагаемому по технической сущности и достигаемому эффекту является акселерометр, содержащий корпус и помещенный в нем на упругом подвесе из монокристалла подвижный узел, а также датчик угла, соединенный через электронный усилитель с магнитоэлектрическим датчиком момента 4. Однако при наличии угловой вибрации по оси маятника- подвижный узел прибора ссэвершает колебания вокруг этой оси, а степень демпфирования колебаний, учитывая выполнение подвеса подвижного узла из монокристаллического материала, ничтожна. Кроме того, технологически невозможно обеспечить абсолютное совпа- k дение точек приложения компенсационных сил катушек датчика момента с осью маятника. Технологическое несовпадение точки приложения результирующей компенсационной силы датчика момента с осью маятника обуславливает угловые колебания подвижного узла вокруг оси маятника даже при отсутствии угловой вибрации, а лишь при наличии проекции линейного вибровозмуцения на измери тельную ось акселерометра. Все это приводит к возникновению вибрационной погрешности. Цель изобретения - повышение виброустойчивости прибора. Указанная цель достигается тем, что в конструкции коютенсационного маятникового акселерометра, состоящего из корпуса и помещенногс в нем на упругом монокристаллическом подвесе подвижного чувствительного узла, датчика угла, выполненного .в виде подвижного элемента, укрепленного на чувствительном узле, и неподвижных элементов, укрепленных на корпусе, и соединенного через электронный блок с.магнитоэлектрическим датчиком момента, две подвижные идентичные катушки которого укреплены на подвижном узле по раз-/ ные его стороны по измерительной Оси/датчик угла выполнен из двух одинаковых частей, разнесенных на равные расстояния от оси маятника по оси, параллельной оси подвеса, а оси катушек датчика момента смещены по оси, параллельной оси подвеса, в разные стороны на одинаковые расстояния от оси маятника, при этом Выходы двух частей датчика угла сое-., динены с суммирующим и вычитгиощим входами сумматора, выходы которого соединены с электронным блоком. На фиг. 1 показана конструктивная схема предлагаемого акселерометра, на фиг. 2 -, то Же, электрическая схема, на фиг. 3 и 4 - схемы работы аксе перометра. Акселерометр состоит из корпуса 1 в котором на упругом монокристаллич. ческом подвесе 2 помещена пластина подвижного узла 3 с укрепленными на ней двумя подвижными электродами 4 двух одинаковых частей OY -и DY емкостного датчика угла. Неподвижные электроды 5DY и DY установлены на корпусе прибора 1. На пластине подвижного узла акселерометра расположены две катушки б магнитоэлектрического датчика момента, укрепленные по обе стороны от пластины 3. Статор магнитоэлектрического датчика момента для каждой из его катушек состоит из постоянного цилиндрического магнита 7 и магнитопровода 8. Подвижный электрод 4 и неподвижные 5 одной из частей ОУ емкостного датчика угла образуют переменные емкости и GZ , аналогично в электрод 4 и два электрода 5 образуют емкости C,j и С. . На чертежах показаны измерительная ось акселерометра 1 ось маят ника 2: , ось подвеса подвижного узла , центр масс подвижного узла 1Щ точка приложения компенсационной силы DH о ,точка приложёНД1Я компенсационной силы DN Q f расстояние от О (или ДО осц 2,, Емкости Of и С ЬУ -включены дифференциально/ например, в измеритель ные плечи моста, образованного также сопротивлениями Zi и Z (фиг, 2), Емкости С и С4 также включены дифференциально (мост С,, С, 2, . На диагонали обоих мостов подается напряжение возбуждения Ug, а снимае мое с измерительных диагоналей напр жение поступает на фазочувствительные выпрямители ФЧВ и ФЧВ . Сигналы с выходов ФЧВ подаются каждый на суммирующий + и вычитакнций - входы сумматора Т , Суммирующий выход + еумматора связан с корректирующим звеном w| , а вычи ающий - с корректиругацим звеном Сигнал с Wj подается на инвертирую щие входы усилителей Y и Y, а сигнал с чД - на инвертирукяцнй вход у и на неинвертирукадий вход Y Выход У через мсяаный выходной каскад МВК и эталонное сопротивление связан с катушкой Кд/ц одной из половин ом магнитоэлектриче кого датчика момента. Аналозтично выход у через МВК и R связан с второй катушкой R, Датчика -момента. Падения напряжения на эталон ных сопротивлениях RgT и су мируются на сумматоре ii , выходная величина Которого пропорциональ на измеряемому акселерометром ускорению. Акселерометр работает следующим образом. При наличии ускорения a по изме рительной оси (} прибора воз ник.ает инерционная сила F , равная шац (где m - масса подвижного узла при .бора) и создающая момент Fj, I (где f расстояние от центра масс ЦМ подвиж ного узла до оси подвеса ), Откл няющий подвижный узел акселерометра от исходного положения. Это откл нение измеряется обоими половина- . ми ОУ и ОУ датчика уг-ла, складыва ётся на суммирукяаем входе Z и с его суммирукадего выхода через корректирующее : звено W подается на инвертирующие входы промежуточных усилителей у и У, а далее через МВК и в .„и через R. а К соответственно. Обе половины ДМ и дм датчика момента развивают момент, компенсирующий момент инерционной силы. Падения напряжения на эталонных сопротивлениях R.yj. и т . суммируются 2 и его выходная Ug пропорциональна ускорению а. При наличии колебаний подвижного узла 3 акселерометра вокруг оси , воэникшощих из-за круговой вибрации по этой оси или наличия переменной составляющей в су. , сигналы с ОУ и ОУ не равны между собой, -поэтому на вычитающем выходе сумматора Z появляется сигнал, величина которого пропорциональна углу отклонения подвижного узла акселерометра вокруг I, а полярность - напряжению отклонения. Этот сигнал, соответству вЗЬШй угловому отклонению подвижного узла относительно оси маятника 5 , проходя через корректирующее звено wj , подается на инвертирующий вход усилителя У и на неинвёртирующий вход усилителя У , а далее через мсэдные выходные каскады и эталонные сопротивления в катушки датчика момента. При наличии ускорения а и при отсутствии угловых колебаний подвижного узла вокруг оси (фиг. 3) момент Мц инерционной силы FM отйосйтельно оси подвеса f. MK V уравновешивается моментами компен сещионных сил FJ и , создаваемых DM и DM, т.е. MK (Fk. + F,)- е. При этом, поскольку конструктивно к. к. приложены к подвижному узлу на одинаковых расстояниях I, суммарный момент относительно оси -Z равен нулю. При наличии ускорения -а и угловых колебаний подвижного узла вокруг оси (фиг. 4) момент инерциоНный силы Mj, « FH I уравновешивается моментами компенсационных сил F| и моментами демпфирующих сил Fa. и Fi (имеющих взаимно противоположные направления) М ( (FK + Ff + FQ, F )cosot -t (F,4 Ч- F,-cos oil , V Однако демпфирующие силы создают момент + F I, демпфирующий колебания подвижного узла относительно оси г, т.е. эффективно уменьшающий их амплитуду , а следовательно, и вибрационную погрешность акселерометра. Таким образом, предлагаемая конструкция акселерометра имеет технические преимущества в сравнении с известным объектом, так как в ней осуществляется электрическое демпфирование угловых колебаний подвижного узла относительно оси маятника, что уменьшает инструментальную вибрационную погрешность-: в работе акселерометра, т.е. повышает его виброустойчивость. Причем это достигается без введения в.конструкцию электромеханического блок «rllJWedpa дополнительных узлов, а лишь благодаря определенной специальной компановке имевдихся в нем узлов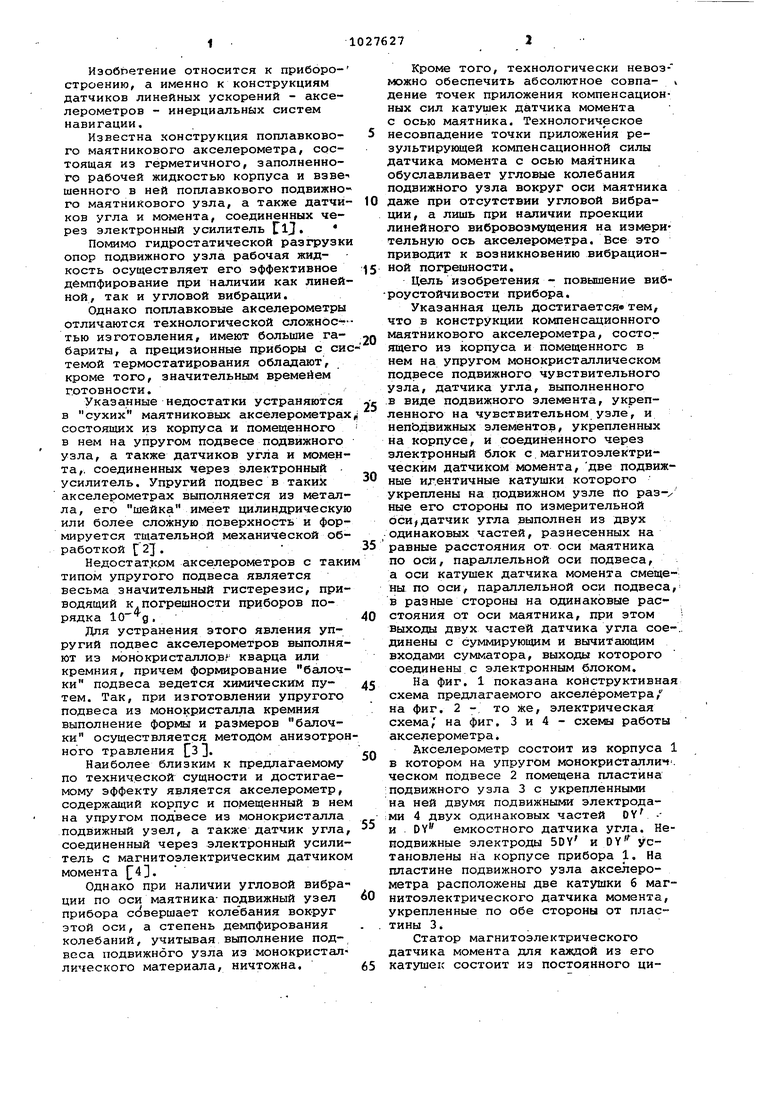
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМПЕНСАЦИОННЫЙ МАЯТНИКОВЫЙ АКСЕЛЕРОМЕТР | 2005 |
|
RU2291450C1 |
| Компенсационный акселерометр | 1982 |
|
SU1067445A1 |
| КОМПЕНСАЦИОННЫЙ МАЯТНИКОВЫЙ АКСЕЛЕРОМЕТР | 2013 |
|
RU2543708C1 |
| Датчик моментов акселерометра компенсационного | 2021 |
|
RU2776595C1 |
| КОМПЕНСАЦИОННЫЙ МАЯТНИКОВЫЙ АКСЕЛЕРОМЕТР | 2013 |
|
RU2559154C2 |
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ЖЕЛЕЗНОДОРОЖНОГО ПОДВИЖНОГО СОСТАВА, ПОДВЕСА ЧУВСТВИТЕЛЬНОГО ЭЛЕМЕНТА ПОПЛАВКОВОГО МАЯТНИКОВОГО АКСЕЛЕРОМЕТРА И УСТРОЙСТВА ЕГО РЕАЛИЗУЮЩИЕ | 2005 |
|
RU2281874C1 |
| КОМПЕНСАЦИОННЫЙ МАЯТНИКОВЫЙ АКСЕЛЕРОМЕТР | 2021 |
|
RU2758892C1 |
| МАЯТНИКОВЫЙ КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 2019 |
|
RU2731652C1 |
| Акселерометр | 1980 |
|
SU901914A1 |
| АКСЕЛЕРОМЕТР | 2010 |
|
RU2485524C2 |
КОМПЕНСАЦИОННЫЙ МАЯТНИКОВЫ АКСЕЛЕРОМЕТР, содержащий корпус и п мещенный в нем на упругом монокристаллическом подвесе подвижный чувст 1 Фиг вительный узел, датчик угла, выполненный в виде подвижного элемента, укрепленного на чувствительном узле, и неподвижных элементов, укрепленных на корпусе, и соединенный через электронный блок с магнитоэлектрическим датчиком момента, две подвижные идентичные катушки которого укреплены -на подвижном узле по разные его стороны по измерительной оси, отличающийся тем, что, с целью повышения виброустойчи- . вости, датчик угла выполнен из двух одинаковых частей, разнесенных на равные расстояния от оси маятника по оси, параллельной оси подвеса, а оси катушек датчика момента смещены по оси, параллельной оси подвеса, в разные стороны на одинакрвые расстояния от оси маятника, при этом выходы двхх частей датчика угла соединены с суммирующим и вычитающим входа|у1и сумматора, выходы Которого соединены с электронным блоком.