Изобретение относится к области измерения уровня жидкости и служит для непрерывного слежения за положением слоя плава полимеров заданной плотности, например, типа полиамидов и др. при производстве синтетических волокон.
Известные следящие уровнемеры, содержащие источник -у-излучеиия, расположенный перед контролируемым объектом, счетчики и измерительную схему, не обеспечивают точного слежения за слоем плава полимера заданной плотности. Плав находится под глубоким вакуумом во вспененном состоянии с переменной плотностью по высоте его столба, переходящего постепенно в пену в верхней части.
В связи с тем что относительное изменение плотности Ар/АЯ, где Ар - изменение плотности плава; АЯ - изменение положения слоя плава заданной плотности, мало, а технологические требования к точности определения АЯ очень жесткие, применение известных следящих радиоизотопных уровнемеров например, типа УРМС-2М, УР-8, УДАР-5 и др., которые обладают достаточно высокой точностью слежения за положением границы раздела фаз: газ - жидкость или газ-твердое тело, исключается.
Предлагаемый следящий уровнемер отличается от известных тем, что он снабжен дополнительным компенсационным каналом,
включающим источник, клин, счетчики, интегрирующую ячейку, блок сравнения, усилитель и вторичный прибор. Канал обеспечивает требуемую точность слежения не только за границей раздела фаз, но и за положением слоя плава полимера заданной плотности.
Кроме того, с целью независимости работы уровнемера от характеристик счетчиков, он снабжен двигателем для поочередного подключения счетчиков в течение одного периода измерения к измерительному и компенсационному каналам.
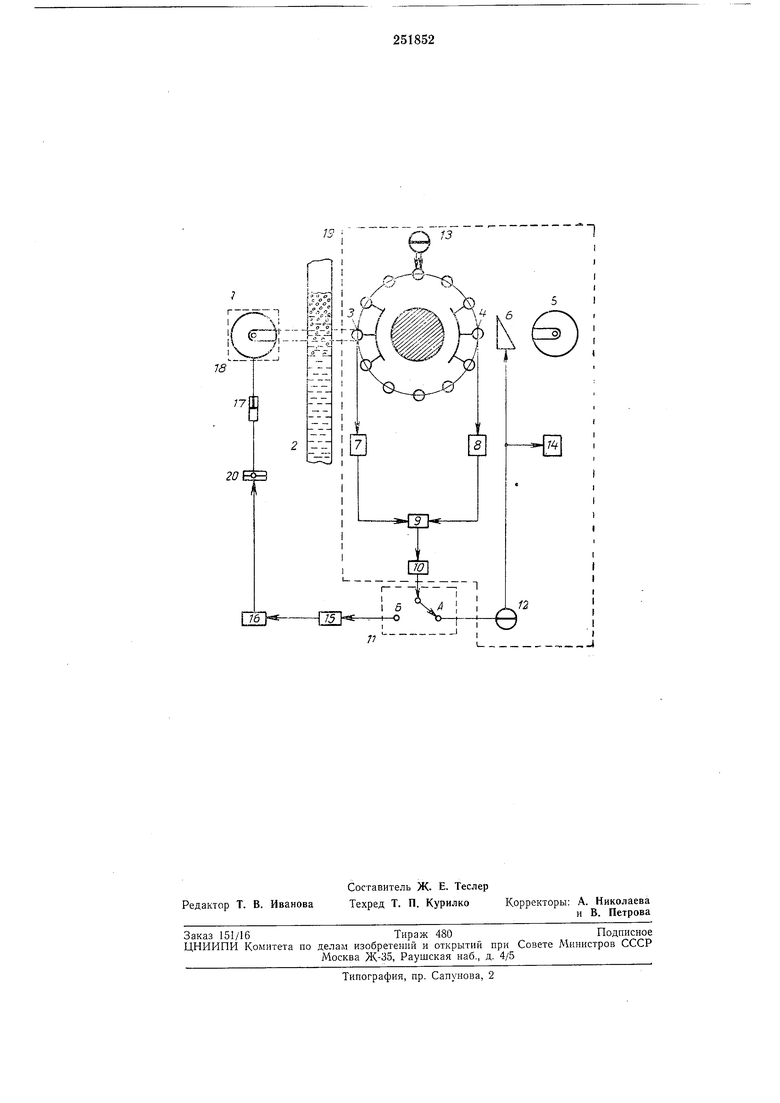
На чертеже дана блок-схема следящего радиоизотопного уровнемера.
Уровнемер состоит из источника / уИзлучсния, смонтированного на передвижной платформе перед объектом 2 в котором контролируется уровень жидкости; счетчиков 3 измерительного канала, измеряющих поток у-частиц,
прошедших сквозь объект; счетчиков 4 компенсационного канала, измеряющих поток -у-частиц, испускаемых источником 5 излучения компенсационного канала, интенсивность которого устанавливается регулирующим клином
6; интегрирующих ячеек 7 и 8, предназначенных для усреднения сигналов счетчиков 3 и 4; блока 9 сравнения, предназначенного для сравнения сигнала измерительного канала с сигналом компенсационного канала; усилитесравнения; переключателя //, предназначенного для перехода с ручного управления на автоматическое; реверсивного двигателя 12, изменяющего положение регулирующего клина 6; двигателя 13, служащего для вращения барабана со счетчиками; вторичного прибора 14 с трансформаторным входом, сердечник которого кинематически связан с выходным валом реверсивного двигателя 12; электропневмопреобразователя 15, предназначенного для преобразования электрического сигнала выхода усилителя в пропорциональный пневматический сигнал; блока 16 слежения, формирующего сигнал управления работой пневматического исполнительного привода 17, который служит для перемещения блоков 18 и 19, жестко соединенных между собой; байпасной панели 20 дистанционного управления, служащей для ручного управления положением блоков 18 и 19. Прибор работает следующим образом. Командным сигналом с выхода байпасной панели 20 дистанционного управления система блоков 18 и 19 перемещается до тех пор, пока на вторичном приборе не устанавливаются показания, соответствующие заданной плотности. После этого начинается режим автоматического слежения за положением слоя плава заданной плотности. Переключатель 11 ставят в положение Б. Система в этом режиме работает следующим образом. При выходе слоя плава заданной плотности из зоны облучения источника 1 Излучения нарушается баланс сигналов, которые поступают на вход блока 9 сравнения по каналам измерительному (источник / у-излучения, счетчики 3 измерительного канала, интегрирующая ячейка 7) и компенсационному (источник 5 у-излучения компенсационного канала, клин 6, счетчик 4 компенсационного канала, интегрирующая ячейка 8). Величина и фаза сигнала разбаланса на выходе блока 9 сравнения определяются отклонением слоя плава заданной плотности из зоны облучения источника / Y-ИЗлучения. Далее сигнал разбаланса усиливается усилителем 10, преобразуется электропневматическим преобразователем 15 в пропорциональный ему пневматический сигнал и поступает на блок 16, который три помощи пневматического иопОЛ1нитель Ного п-ривода типа ПСП-18 осуществляет автоматическое слежение за положением слоя заданной плотности. Предмет изобретения 1. Следящий уровнемер, содержащий источник у-излучения, расположенный перед контролируемым объектом, счетчики и измеритель- ную схему, отличающийся тем, что, с целью обеспечения точного слежения за слоем плава полимера заданной плотности, он снабжен дополнительным компенсационным каналом, включающим источник, клин, счетчики, интегрирующую ячейку, блок сравнения, усилитель и вторичный прибор. 2. Уровнемер по п. 1, отличающийся тем, что, с целью независимости его работы от характеристик счетчиков, он снабжен двигателем для поочередного подключения счетчиков в течение одного периода измерения к измерительному и компенсационному каналам.
DO
| название | год | авторы | номер документа |
|---|---|---|---|
| ас^:СОЮЗНАЯ li'^~imm-wm^E,m | 1973 |
|
SU387260A1 |
| Радиоизотопный следящий уровнемер | 1980 |
|
SU939950A1 |
| Радиоизотопный следящий уровнемер | 1989 |
|
SU1832179A1 |
| СЛЕДЯЩИЙ УРОВНЕМЕР | 1994 |
|
RU2080564C1 |
| УСТРОЙСТВО для ИЗМЕРЕНИЯ УРОВНЯ | 1972 |
|
SU333409A1 |
| Плотномер | 1983 |
|
SU1081411A1 |
| РАДИОИЗОТОПНЫЙ РЕЛЕЙНЫЙ ПРИБОР | 1971 |
|
SU320792A1 |
| УСТРОЙСТВО для ИЗМЕРЕНИЯ ВЛАЖНОСТИ | 1973 |
|
SU392391A1 |
| РАДИОИЗОТОПНЫЙ УРОВНЕМЕР-О nAT'JHTiil • •* ур--;^;^ирг;: *Б^!^;!!1Г:ЕКА | 1965 |
|
SU173972A1 |
| Устройство для определения уровня жидкости | 1989 |
|
SU1777003A1 |