1
Изобретение относится к измерительной технике и может быть использовано для измерения влажности, в частности, при автоматизации производственных процессов в нефтяной, химической, металлургической и других отраслях промышленности.
Известные устройства аналогичного назначения, содержащие емкостный датчик, включенный в измерительную компенсационную схему, выполненную в виде двух настроенных в унисон генераторов высокой частоты, подключенных через преобразователь к блоку сравнения, выход которого через привод связан с компенсационным конденсатором, установленным в колебательном контуре рабочего генератора, не обеспечивают достаточной точности измерения быстро изменяющейся влажности из-за низкого быстродействия следящей электромеханической системы.
Цель изобретения - новыщение точности измерения.
Цель достигается тем, что предлагаемое устройство снабжено замкнутым через преобразователь обратной связью дополнительным контуром автоматического регулирования, соединенным с измерительной компенсационной схемой через дифференцирующий блок и выполненным в виде блока сравнения, подключенного через усилитель и привод к дополнительному компенсационному конденсатору.
причем компенсационные .конденсаторы измерительного и дополнительного контуров соединены с механическим дифференциалом, подключенным к регистрирующему прибору.
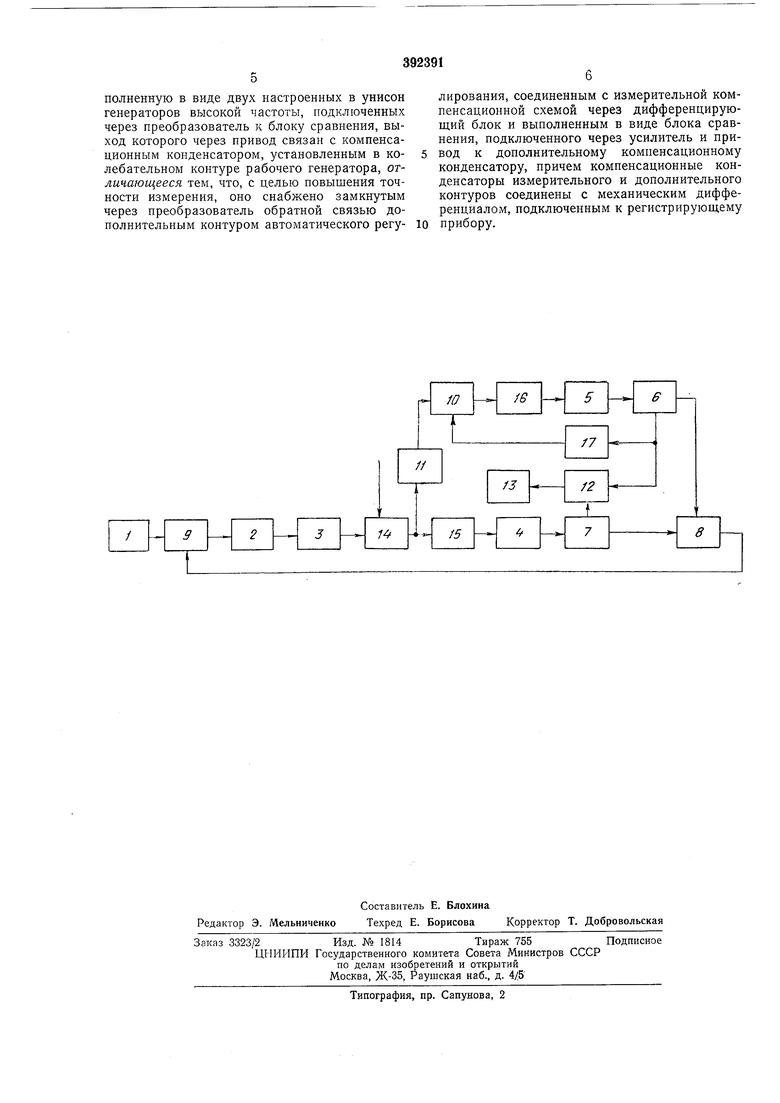
На чертеже приведена блок-схема предлагаемого устройства. Оно содержит датчик /; измерительную схему 2; преобразователь 3 частота - напряжение; двигатели (привод) 4, 5; компенсационные конденсаторы 6, 7
переменной емкости; блок 8 алгебраического суммирования электрической емкости; блоки 9, 10 сравнения; дифференцирующий блок 11 механический дифференциал 12; регистрирующий прибор 13.
Основной измерительный контур, включающий емкостный датчик 1, измерительную схему 2, преобразователь 3, блок 14 сравнения, усилитель 15, двигатели 4, конденсатор 7, блоки 8 и Я охваченные обратной связью, представляют из себя автокомпенсационную измерительную схему, в которой электромеханическая следящая система (привод 4) осуществляет ненрерывную балансировку конденсатора 7 в соответствии с величиной емкости, поступающей на вход блока 9 сравнения от датчика /.
Сигнал ошибки в виде электрической емкости, равной разности между емкостью датчика / и емкостью компенсационного конденсатора 7, поступает на измерительную схему 2.
Измерительная схема представляет собой (не показано) два высокочастотных генератора (рабочий и опорный). К колебательному контуру рабочего генератора подключен выход блока 9 сравнения, следовательно, частота этого генератора зависит от величины сигнала ошибки. Выходной величиной измерительной схемы 2 является разностная частота рабочего и опорного генераторов (частота биений). Разностная частота преобразуется преобразователем 3 в постоянное напряжение, сравнивается в блоке 14 с заданным напряжением и поступает на вход усилителя 15.
Таким образом, на вход усилителя 15 поступает напряжение, уровень и полярность которого определены величиной и знаком сигнала ошибки измерительного контура. В соответствии с входным сигналом усилителя привод 4 осуществляет балансировку компенсационной схемы, изменяя емкость конденсатора 7.
Следящая система обеспечивает точное воспроизведение входного сигнала в установившемся режиме в соответствии с ее порядком астатизма и коэффициентом усиления в ра3 ом кнутом состоянии.
Астатические следящие системы, содержащие одно или несколько интегрирующих звеньев, обеспечивают устранение установившихся ошибок по положению (система с одним интегрирующим звеном), по скорости изменения входной величины (система с двумя интегрирующими звеньями), по ускорению и т. д.
Следящие системы известных автокомпенсационных влагомеров являются астатическими системами первого порядка, так как они содержат одно интегрирующее звено - исполнительный двигатель.
В предлагаемом устройстве при работе основного измерительного контура с некоторой динамической ошибкой на вход усилителя 15 поступает постоянно меняющийся сигнал, пропорциональный сигналу ошибки. Этот же сигнал одновременно поступает на вход дифференцирующего (С цепь) блока 11, выходное напряжение которого, пропорциональное производной входного сигнала усилителя 15 (т. е. производной от динамической ошибки системы), поступает на блок 10 сравнения дополнительного астатического контура, состоящего из усилителя 16, привода 5, компенсационного конденсатора 6 и блока 17 обратной связи.
Устройство работает следующим образом.
Если характер изменения измеряемой влажности таков, что электромеханическая следящая система основного измерительного контура осуществляет балансировку без ошибки слежения или с постоянной во времени ошибкой, то сигнал на выходе дифференцирующего блока // равен нулю и дополнительный астатический контур находится в состоянии покоя, т. е. величина емкости переменного конденсатора 6 не изменяется. Если же следящая система основного контура «не справляется с балансировкой входного сигнала и в ней появляется переменная по величине ошибка слежения, то на выходе блока 11 появляется сигнал, пропорциональный производной от сигнала ошибки слежения соответствующего уровня. Дополнительный астатический контур в этом случае балансирует компенсационный конденсатор 6 таким образом, что емкость этого конденсатора, суммируясь в блоке 8 с емкостью переменного конденсатора 7, компенсирует ту часть входного сигнала (входной емкости), которая вызывает динамическую ошибку в следящей системе.
Таким образом, дополнительный астатический контур автоматически подключается для компенсации переменной динамической ощибки следящей системы.
Параметры блока 11 выбирают в зависимости от того, какая переменная составляющая входного сигнала должна быть измерена без искажений. Зная порядок астатизма основного и вспомогательного измерительного контуров системы, можно четко определить, какая переменная составляющая входного сигнала измеряется без искажений. Если основной и вспомогательный контуры обладают астатизмом первого порядка, то система в целом обеспечивает устранение ошибки слежения по ускорению входного сигнала (для случая, когда блок // представляет собой дифференцирующую цепь), но будет обладать ошибкой по скорости. Если необходимо, чтобы система устраняла ошибку по скорости входного сигнала, то блок 11 можно отключить, подавая сигнал ошибки основного контура прямо на вход блока 10.
Для устранения ошибки слежения по третьей производной входного сигнала в блоке 11 необходимо включить два дифференцирующих звена последовательно, однако при этом в системе не исключаются ощибки по скорости, ускорению и по четвертой производной входного сигнала.
Следовательно, систему можно настроить избирательно на желаемую часть спектра измеряемого сигнала или просто расширить ее частотный диапазон.
Блоки 10, 12, 5 я 6 охвачены обратной связью (блок 17, представляющий собой преобразователь угол поворота - напряжение) для того, чтобы дополнительный контур давал неискаженное воспроизведение сигнала ошибки основного контура.
Механический дифференциал 12 суммирует угол поворота роторов переменных конденсаторов 7 и б. Угол поворота суммирующего вала дифференциала является входной величиной для регистрирующего блока 13.
Предмет изобретения
Устройство для измерения влажности, содержащее емкостный датчик, включенный в измерительную компенсационную схему, выполненную в виде двух настроенных в унисон генераторов высокой частоты, подключенных через преобразователь к блоку сравнения, выход которого через привод связан с компенсационным конденсатором, установленным в колебательном контуре рабочего генератора, отличающееся тем, что, с целью повышения точности измерения, оно снабжено замкнутым через преобразователь обратной связью дополнительным контуром автоматического регулирования, соединенным с измерительной компенсационной схемой через дифференцирующий блок и выполненным в виде блока сравнения, подключенного через усилитель и привод к дополнительному компенсационному конденсатору, причем компенсационные конденсаторы измерительного и дополнительного контуров соединены с механическим дифференциалом, подключенным к регистрирующему прибору.

| название | год | авторы | номер документа |
|---|---|---|---|
| Компенсационный акселерометр | 2019 |
|
RU2708716C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УСКОРЕНИЙ | 2009 |
|
RU2400761C1 |
| Компенсационный акселерометр | 2019 |
|
RU2700339C1 |
| Компенсационный акселерометр | 2022 |
|
RU2792706C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 2012 |
|
RU2513667C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 2009 |
|
RU2411522C1 |
| Устройство для измерения ускорений | 2022 |
|
RU2793895C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 2009 |
|
RU2415442C1 |
| Устройство для измерения ускорений | 2022 |
|
RU2785946C1 |
| Устройство для измерения ускорений | 2022 |
|
RU2783223C1 |