Устройства ДЛЯ непрерывного измерения и регистрации скорости движения и объема дыхательного газа, содержащие датчик скоростипневмотахометр и интегратор, известны. Однако при их использовании интегрирование скоррсти ДЛЯ получения объема и регистрации кривых скорости и объема производится электрическим интегратором и самописцем, тогда как исходным сигналом, соответствующим измеряемой скорости движения воздуха, является пневматический сигнал-перепад давлений, снимаемый с датчика скорости - пневмотахометра. Это приводит к необходимости иметь в схеме пневмоэлектрический преобразователь, что вносит дополнительную погрешность в измерения, понижает надежность, существенно усложняет схему и конструкцию устройства.
Предлагаемое устройство отличается тем, что интегратор выполнен в виде пневматического решающего усилителя, пневматического апериодического звена, охваченного положительной обратной связью, и нуль-органа, содержащего струйный элемент тииа «память, ко входам которого подключены пневматические датчик давления и кнопка сброса, пневмоусилитель сигналов и клапаны. Такое устройство позволяет повысить точность измерения и более надежно в работе; кроме того, удается упростить его схему и конструкцию.
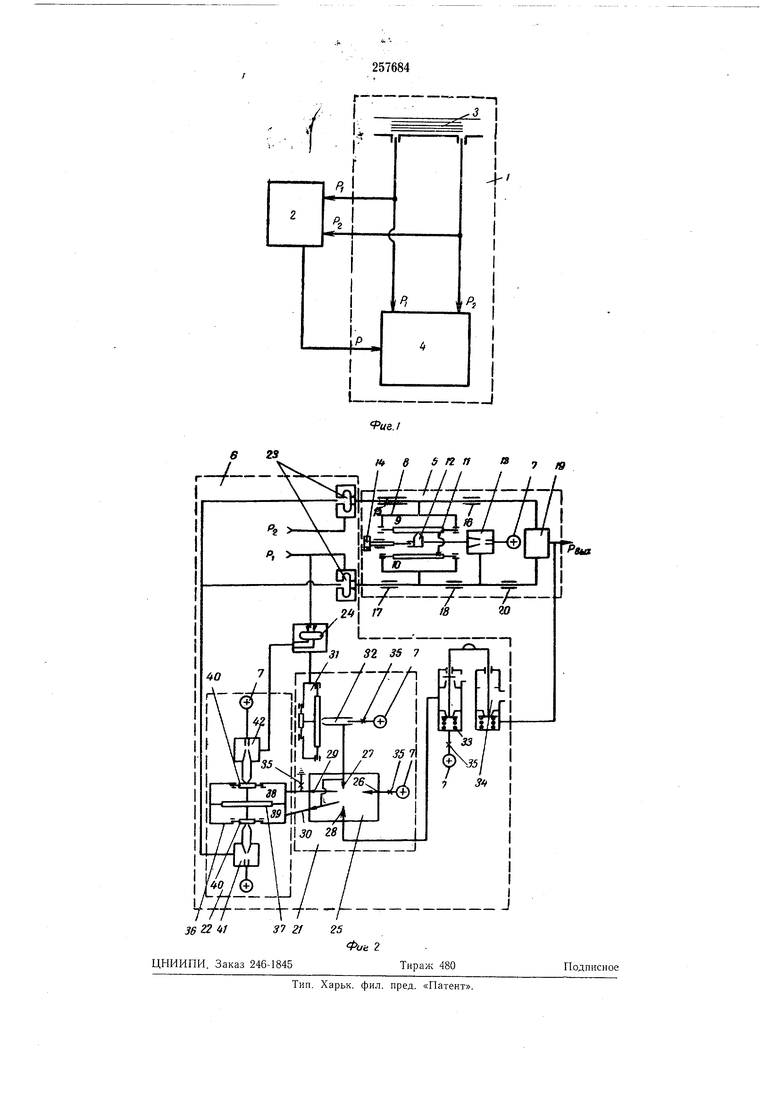
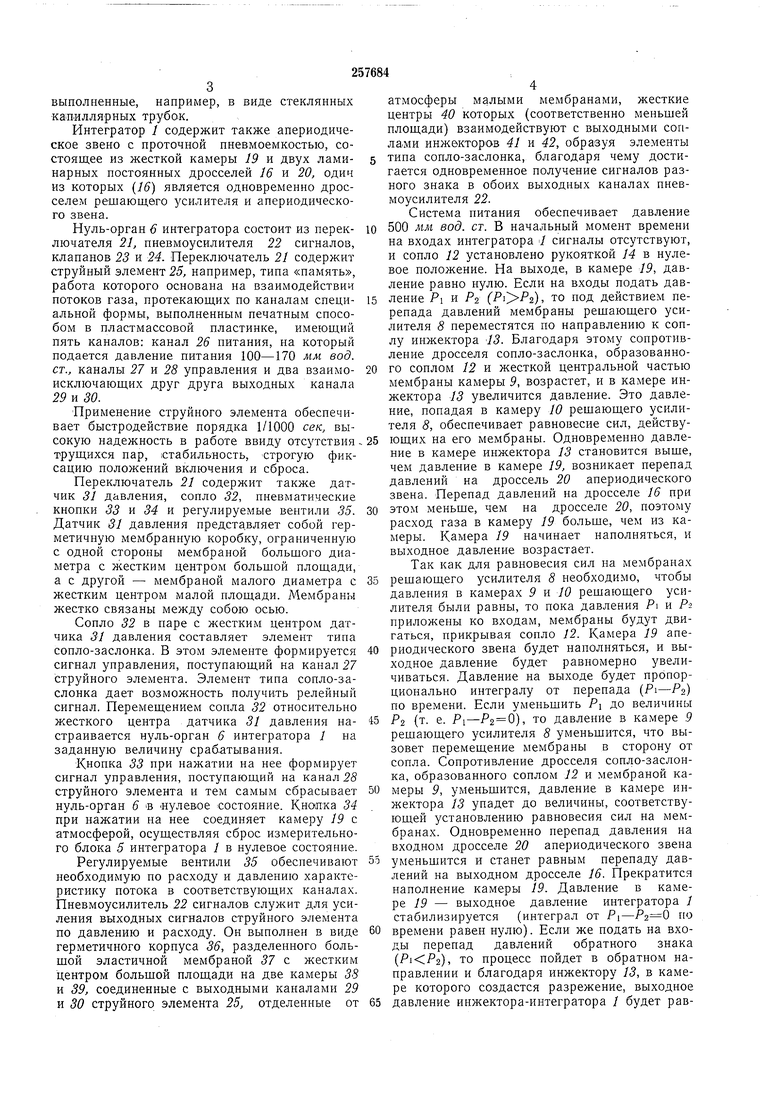
На фиг. 1 изображена блок-схема описываемого устройства; на фиг. 2 - принципиальная схема интегратора.
Устройство состоит из интегратора / и пневмотахометра 2, содерл ащего датчик 3 скорости и самописец 4, имеющий несколько зеркальных манометров-по числу каналов, по которым можно вести одновременную запись измерений.
Интегратор / содержит измерительный блок 5, нуль-орган 6 и систему 7 питания.
В измерительный блок 5 входят: пневматический рещающий усилитель 8, представляющий собой две герметичные камеры 9 и 10 малого объема, ограниченные с одной стороны мембранами равной площади, жесткие центральные части которых (также равной площади) жестко связаны между собой скобой //. Одна из жестких центральных частей является заслонкой сопла 12, которая служит выходным СОПЛОМ инжектора 13, питаемого газом под давлением 500 мм вод. ст.
Для установки сопла 12 в нупевое положение, т. е. положение, в котором давление на выходе интегратора / при отсутствии сигналов на входе равно нулю, служит рукоятка 14, имеющая на конце эксцентрик.
выполненные, нанример, в виде стеклянных капиллярных трубо.к.
Интегратор / содержит также апериодическое звено с проточной пневмоемкостью, состоящее из жесткой камеры 19 и двух ламинарных постоянных дросселей 16 и 20, один из которых (16) является одновременно дросселем решающего усилителя и апериодического звена.
Нуль-орган 6 интегратора состоит из переключателя 21, пневмоусилителя 22 сигналов, клапанов 23 и 24. Переключатель 21 содержит струйный элемент 25, например, типа «память, работа которого основана на взаимодействии потоков газа, протекающих по каналам снециальной формы, вынолненным печатным способом в пластмассовой пластинке, имеющий пять каналов: канал 26 питания, на который подается давление питания 100-170 мм вод. ст., каналы 27 и 28 управления и два взаимоисключающих друг друга выходных канала 29 и 30.
Применение струйного элемента обеспечивает быстродействие порядка 1/1000 сек, высокую надежность в работе ввиду отсутствия трущихся пар, стабильность, строгую фиксацию положений включения и сброса.
Переключатель 21 содержит также датчик 31 давления, сопло 32, пневматические кнопки 33 н 34 к регулируемые вентили 35. Датчик 31 давления представляет собой герметичную мембранную коробку, ограниченную с одной стороны мембраной большого диаметра с жестким центром большой площади, а с другой - мембраной малого диаметра с жестким центром малой площади. Мембраны жестко связаны между собою осью.
Сопло 32 в паре с жестким центром датчика 31 давления составляет элемент типа сопло-заслонка. В этом элементе формируется сигнал управления, поступающий на канал 27 струйного элемента. Элемент типа сопло-заслонка дает возможность получить релейный сигнал. Перемещением сопла 32 относительно жесткого центра датчика 31 давления настраивается нуль-орган 6 интегратора 1 на заданную величину срабатывания.
Кнопка 33 при нажатии на нее формирует сигнал управления, поступающий на канал 28 струйного элемента и тем самым сбрасывает нуль-орган 6 В .нулевое состояние. Кнапка 34 при нажатии на нее соединяет камеру 19 с атмосферой, осуществляя сброс измерительного блока 5 интегратора / в нулевое состояние.
Регулируемые вентили 35 обеспечивают необходимую по расходу и давлению характеристику потока в соответствующих каналах. Пневмоусилитель 22 сигналов служит для усиления выходных сигналов струйного элемента по давлению и расходу. Он выполнен в виде герметичного корпуса 36, разделенного большой эластичной мембраной 37 с жестким центром большой площади на две камеры 38 и 39, соединенные с выходными каналами 29 и SO струйного элемента 25, отделенные от
атмосферы малыми мембранами, жесткие центры 40 которых (соответственно меньшей площади) взаимодействуют с выходными соплами инжекторов 41 и 42, образуя элементы типа сопло-заслонка, благодаря чему достигается одновременное получение сигналов разного знака в обоих выходных каналах пневмоусилителя 22.
Система питания обеспечивает давление 500 лш вод. ст. В начальный момент времени на входах иитегратора / сигналы отсутствуют, и сопло 12 установлено рукояткой 14 в нулевое положение. На выходе, в ка.мере 19, давление равно нулю. Если на входы подать давление PI и P-i (), то под действием перепада давлений мембраны решающего усилителя 8 переместятся по направлению к соплу инжектора 13. Благодаря этому сопротивление дросселя сопло-заслонка, образованного соплом 12 и жесткой центральной частью мембраны камеры 9, возрастет, и в камере инжектора 13 увеличится давление. Это давление, попадая в камеру 10 решающего усилителя 8, обеспечивает равновесие сил, действующих на его мембраны. Одновременно давление в камере инжектора 13 становится выше, чем давление в камере 19, возникает перепад давлений на дроссель 20 апериодического звена. Перепад давлений на дросселе 16 при этом меньше, чем на дросселе 20, поэтому расход газа в камеру 19 больше, чем из камеры. Камера 19 начинает наполняться, и выходное давление возрастает.
Так как для равновесия сил па мембранах решаюшего усилителя 8 необходимо, чтобы давления в камерах 9 и 10 решающего усилителя были равны, то пока давления Р и Рз приложены ко входам, мембраны будут двигаться, прикрывая сонло 12. Камера 19 апериодического звена будет наполняться, и выходное давление будет равномерно увеличиваться. Давление на выходе будет пропорционально интегралу от перепада (Pi-А) по времени. Если уменьшить PI до величины РЧ (т. е. PI-Р2 0), то давление в камере .9 решающего усилителя 8 уменьшится, что вызовет перемещение мембраны в сторону от сопла. Сопротивление дросселя сопло-заслонка, образованного соплом 12 и мембраной камеры 9, уменьшится, давление в камере инжектора 13 упадет до величины, соответствующей установлению равновесия сил на мембранах. Одновременно перепад давления на входном дросселе 20 апериодического звена уменьшится и станет равным перепаду давлений на выходном дросселе 16. Прекратится наполнение камеры 19. Давление в камере 19 - выходное давление интегратора 1 стабилизируется (интеграл от PI-Р2 0 по времени равен нулю). Если же подать на входы перепад давлений обратного знака (), то процесс пойдет в обратном направлении и благодаря инжектору /5, в камере которого создастся разрежение, выходное давление инжектора-интегратора / будет равномерно уменьшаться (интегрируется отрицательная величина PI-Р2 0). Если же перенад давлений на входе (Pi-Р) является нериодически изменяющейся величиной, что имеет место в случае интегрирования скорости движения дыхательного воздуха, то процесс изменения выходного давления в камере 19 также будет иметь нериодический характер.
Чтобы обеспечить заданные перепады давлений, дроссели интегратора / должны быть подобраны определенным образом. Подбор дросселей производится посредством решения системы уравнений, описывающих работу интегратора. Решение уравнений относительно выходного давления РВЫХ интегратора / дает следующие соОтнощения проводимостей дросселей:
а.|р; т-8; .
Здесь а, р, Y, 8 и ср - проводимости дросселей соответственно 15, 16, 17, 18 и 20.
При таком подборе проводимостей дросселей интегратор / осуществляет математическую операцию
1 + Явых - + 8 (P. - PiJdt + b,
1 ио
где b - постоянная интегрирования, которая рукояткой 14 подбирается равной нулю; t - время; Ги - постоянная времени интегратора, равная
Т„ У/2 Re (p + f),
где V объем жесткой камеры 19; в - температура в °К, R - газовая постоянная.
Нуль-орган 6 интегратора предназначен для того, чтобы начало интегрирования максимально совпадало по фазе с началом выдоха. Это необходимо для правильного совместного прочтения пневмотахолраммы (кривой скоростей) и «ривой объемов.
Устройство работает следующим образом.
В начальный момент времени струя находится в прямом канале 29 струйного элемента 25. Мембрана пневмоусилителя 22 сигналов сдвинута вниз. Выходное сопло инжектора 41 перекрыто. В управляющей линии инжектора 41 имеется давление, которое закрывает клапаны 23. В управляющей линии инжектора 42 имеется разрежение, которое держит открытым клапан 24. Пациент подключается посредством загубника к датчику 3 скорости во время вдоха и создает в камере датчика 31 некоторое разрежение. Сонло 32 открыто, на входном канале 27 давление равНО 0; нуль-орган 6 интегратора 1 настроен на срабатывание при Pi 1,5 мм вод. ст. В момент начала выдоха, когда давление Pi l,5 мм вод. ст., мембрана датчика 3 да1вления перекрывает сопло 32, и на входной канал 27 струйного элемента 25 поступает управляющий сигнал, который сбрасывает струю в наклонный канал 30, где она удерживается обратной связью. Наполняется камера 39 пневмоусилителя 22 сигналов, мембрана его сдвигается вверх, перекрывая сопло инжектора 42 и открывая сопло инжектора 41. В управляющей линии инжектора 42 появляется давление, а в управляющей линии инжектора 41 - разрежение.
Клапаны 23 открывают входы измерительного блока 5 интегратора /. Клапан 24 перекрывает вход в нуль-орган 6. Перепад давлений (PI-Рг) с датчика 3 скорости пневмотахометра 2 попадает на вход измерительного блока 5 и интегрируется. Выходной сигнал интегратора / заводится на один из выходов самонисца 4 пневмотахометра 2. Одновременно на другой его вход заводится перепад давлений (Pi-Р2) с датчика 3 скорости.
Происходит одновременная регистрация кривой скорости и кривой объемов. По окончании интегрирования нажимается кнопка 33 сброса, которая соединяет входной канал 28 струйного элемента 25, до этого открытый в атмосферу, с источником давления. На входном канале 28 появляется сигнал управления, который сбрасывает струю в прямой канал 29, приводя нуль-орган 6 в исходное нулевое положение. Одновременно кнопкой 34 камера 19 измерительного блока 5 соединяется с атмосферой и происходит сброс выходного давления до 0.
Предмет изобретения
Устройство для измерения и регистрации скорости движения и объема дыхательного воздуха, содержащее ппевмотахограф и интегратор, отличающееся тем, что, с целью повышения точности измерений и надежности устройства, интегратор выполнен в виде пневматического решающего усилителя, пневматического апериодического звена, охваченного положительной обратной связью, и нуль-органа, содержащего струйный элемент типа «память, ко входам которого подключены пневматические датчик давления и кнопка сброса, пневмоусилитель сигналов и клапаны.
| название | год | авторы | номер документа |
|---|---|---|---|
| АППАРАТ ДЛЯ ИСКУССТВЕННОГО ДЫХАНИЯ | 1967 |
|
SU193691A1 |
| Следящий привод | 1976 |
|
SU636423A1 |
| Пневматическая сеялка для дозирования сыпучих материалов | 1981 |
|
SU1034631A1 |
| ЭЛЕКТРОПНЕВМАТИЧЕСКИЙ КЛАПАН | 1969 |
|
SU255682A1 |
| АППАРАТ ДЛЯ ИСКУССТВЕННОЙ ВЕНТИЛЯЦИИ ЛЕГКИХ | 1970 |
|
SU270193A1 |
| ГИДРАВЛИЧЕСКИЙ ОПЕРАЦИОННЫЙ УСИЛИТЕЛЬ | 1969 |
|
SU251942A1 |
| Способ внесения жидких удобрений штанговым опрыскивателем и устройство для его осуществления | 1982 |
|
SU1063352A1 |
| ГИСТЕРОТУБАТОР | 1971 |
|
SU300190A1 |
| ПНЕВМАТИЧЕСКОЕ ЛОГИЧЕСКОЕ УСТРОЙСТВО | 1969 |
|
SU246155A1 |
| УСТРОЙСТВО ДЛЯ НАГНЕТАНИЯ КРОВИ | 1970 |
|
SU419222A1 |