Известны устройства для амортизации, связывающие колеблющийся объект с неподвижным основанием л содержащие упругие элементы, один из которых выполнен управляемым.
Особенностью предложенного Устройства является то, что управляемый упругий элемент представляет собой плоскую пружину, входящую в паз, выполненный на боковой поверхности по оси симметрии колеблющегося объекта. Это позволяет упростить конструкцию и исключить влияние смещений на положение равновесия колеблющегося объекта.
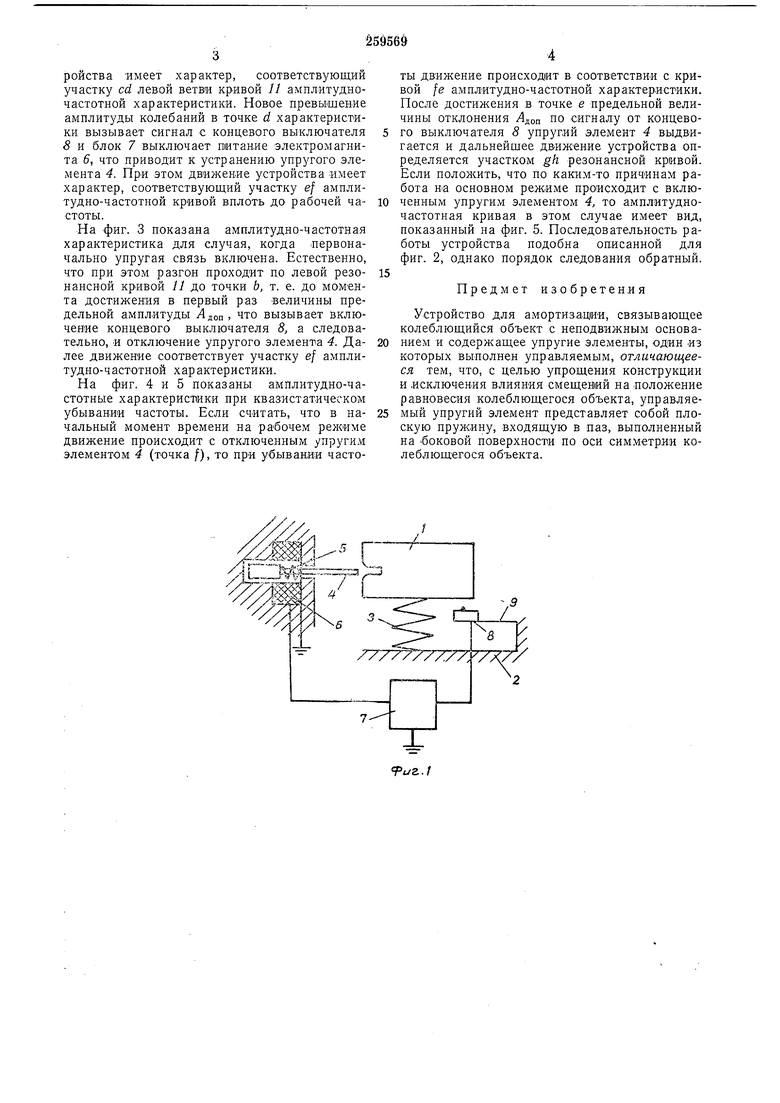
На фиг. 1 изображено описываемое устройство; на фиг. 2-5 - амплитудно-частотные характерист1ики колеблющегося объекта под действием гармонической возмущающей силы.
Описываемое устройство, связывающее колеблющийся объект / с неподвижным основанием 2, содержит упругие элементы 3 и 4. Упругий элемент 4 представляет собой плоскую пружину, входящую в паз, выполненный на боковой поверхности по оси симметрии колеблющегося объекта 1. Включение и выключение из работы упругого элемента4 осуществляется с помощью пружины 5 и электромагнита 6, управление которым осуществляется через блок управления 7, входным сигналом которого является замыкание концевого выключателя 8 в момент превышения допустимого
уровня колебаний колеблющегося объекта 1. Для предотвращения разрущения выключателя при амплитудах колебаний, больщих Адоп , он закреплен на упругой подвеске 9.
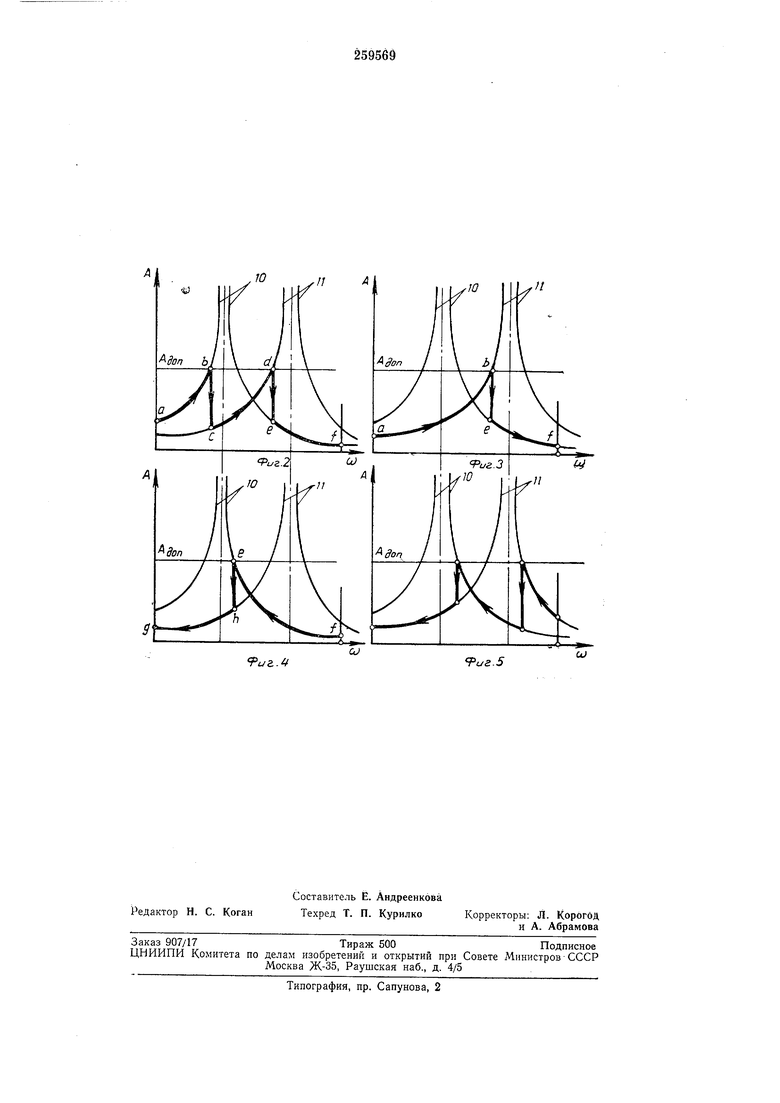
Принцип работы указанного устройства уяснить из фиг. 2-5. На фиг. 2 и 3 тонкими кривыми показаны амплитудно-частотные кривые колебаний колеблющегося объема / под действием гармонической возмущающей силы на одной упругой связи, когда Жесткость упругой подвески равна жесткости упругого элемента .3 (кривая 10) и с учетом упругого элемента 4 (кривая //). В последнем случае жесткость подвески колеблющегося объекта / равна сумме жесткостей упругих элементов . Положим, что условиями амортизации налол ено требование, чтобы амплитуда колебаний не превыщала Лдоп . Рассмотрим работу указанного устройства при квазистатическом разгоне (фиг. 2). В начальный момент времени электромагнит был отключен и колебания колеблющегося объекта происходили лищь на упругом элементе 3. При этом с изменением частоты со
и изменение амплитуды идет по левой ветви амплитудно-частотной характеристики от точки а до точки Ь, затем из-За срабатывания концевого выключателя 8 блок 7 подает напряжение на электромагнит 6 и выдвигается
ройства имеет характер, соответствующий участку cd левой ветви кривой 11 амплитудночастотной характеристики. Новое превышение амплитуды колебаний в точке d характеристики вызывает сигнал с концевого выключателя 8 и блок 7 выключает питание электромагнита 6, что приводит к устранению упругого элемента 4. При этом движение устройства имеет характер, соответствующий участку е/ амплитудно-частотной кривой вплоть до рабочей частоты.
На фиг. 3 показана амплитудно-частотная характеристика для случая, когда .первоначально упругая связь включена. Естественно, что при этом разгон проходит по левой резонансной кривой 11 до точки Ь, т. е. до момента достижения в первый раз величины предельной амплитуды Л ДСП , что вызывает включение концевого выключателя 8, а следовательно, и отключение упругого элемента 4. Далее движение соответствует участку е/ амплитудно-частотной характеристики.
На фиг. 4 и 5 показаны амплитудно-частотные характеристики при квазистатическом убывании частоты. Если считать, что в начальный момент времени на рабочем режиме движение происходит с отключенным упругим элементом 4 (точка /), то при убывании частоты движение происходит в соответствии с кривой fe амплитудно-частотной характеристики. После достижения в точке е предельной величины отклонения Лдоп по сигналу от концевого выключателя 8 упругий элемент 4 выдвигается и дальнейшее движение устройства определяется участком gh резонансной кривой. Если положить, что по каким-то причинам работа Hia основном режиме происходит с включенным упругим элементом 4, то амплитудночастотная кривая в этом случае имеет вид, показанный на фиг. 5. Последовательность работы устройства подобна описанной для фиг. 2, однако порядок следования обратный.
Предмет изобретения
Устройство для амортизации, связывающее колеблющийся объект с неподвижным основанием и содержащее упругие элементы, один из которых выполнен управляемым, отличающееся тем, что, с целью упрощения конструкции и исключения влияния смещений на положение равновесия колеблющегося объекта, управляемый упругий элемент представляет собой плоскую пружину, входящую в паз, выполненный на боковой поверхности по оси симметрии колеблющегося объекта.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ НАСТРОЙКИ РЕЖИМОВ РАБОТЫ ВИБРОЗАЩИТНОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2595733C2 |
| Устройство для возбуждения колебаний | 1988 |
|
SU1648576A1 |
| Гаситель горизонтальных колебаний сиденья транспортного средства | 1990 |
|
SU1752598A1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЖЕСТКОСТИ ВИБРОЗАЩИТНОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2475658C2 |
| СПОСОБ ВИБРОАКУСТИЧЕСКОЙ ДЕФЕКТОВКИ КОЛЕНЧАТОГО ВАЛА | 2018 |
|
RU2724182C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ДИНАМИЧЕСКОГО ГАШЕНИЯ КОЛЕБАНИЙ | 2015 |
|
RU2604250C2 |
| Способ регулирования уровня колебания в подвесках тягового двигателя электровоза и устройство для его осуществления | 2018 |
|
RU2704637C1 |
| Способ дефектоскопии изделий акустическим методом | 1976 |
|
SU648902A1 |
| Вибрационно-центробежный сепаратор | 1988 |
|
SU1558510A1 |
| СПОСОБ УПРАВЛЕНИЯ И ИЗМЕНЕНИЯ ДИНАМИЧЕСКОГО СОСТОЯНИЯ ВИБРОЗАЩИТНОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2018 |
|
RU2696062C1 |
fui.
)
.5
