Изобретение относится к области машиностроения и может быть использовано в транспортных средствах и робототехнических устройствах.
При конструировании сложных технических объектов, используемых в различных областях машиностроения, возникает проблема в защите от вибрационных воздействий частей, составляющих структуру механизма. Для уменьшения воздействия вибрационного контура предлагается способ построения систем динамического гашения колебаний и устройство для его реализации, которые основаны на введении в виброзащитные системы дополнительных симметричных структур, состоящих из массоинерционных звеньев и рычажных механизмов, связывающих объект защиты с вибрирующим основанием, обеспечивающих эффекты взаимной компенсации силовых факторов, возникающих от внешних периодических возмущений. При проведении патентного поиска выявлены следующие аналоги.
В патенте на изобретение (№1008535, МПК F16F 15/00, B60G 17/00, 06.03.1980) предложена вибрационная подвеска объекта, содержащая упругий элемент, прикрепленный концами к вибрирующему и защищаемому объектам, и параллельный ему компенсатор жесткости, закрепленный первым концом на вибрирующем объекте, а вторым соединенный кинематической связью с защищаемым объектом. С целью повышения эффективности в процессе перестройки подвески на изменяющуюся нагрузку кинематическая связь представляет собой установленный в зоне между защищаемым объектом и упругим элементом следящий механизм, содержащий корпус, пружину слежения с нагрузкой, установленную между защищаемым объектом и корпусом, и рычаг второго рода, шарнирно связанный с корпусом и защищаемым объектом, одна точка рычага неподвижна относительно вибрирующего объекта и в этой точке шарнирно закреплен конец компенсатора жесткости.
Недостатком данной модели является отсутствие гашения колебаний на всех частотах.
В патенте (№2426922, МПК F16F 9/53, F16F 15/00, F16F 15/03, 20.08.2011) способ демпфирования колебаний заключается в том, что путем возбуждения импульсов магнитного поля создают дополнительную диссипативную силу сопротивления в области демпфирующей магнитной жидкости, которая пространственно предваряет передний фронт перемещения части подвижной системы, погруженной в магнитную жидкость в направлении перемещения. Устройство для демпфирования колебаний содержит цилиндр, заполненный магнитной жидкостью, подвижные в осевом направлении шток с поршнем, размещенные в цилиндре, соленоидную катушку из нескольких секций, охватывающую цилиндр и подключаемую к регулируемому источнику питания. Регулируемый источник питания содержит измерители положения и направления перемещения поршня, выходы которых соединены с первым и вторым информационными входами логического блока. Силовой вход логического блока соединен с источником питания, а выход соединен с управляющим входом коммутатора. Выходы коммутатора соединены с входами секций соленоидной катушки. Достигается повышение эффективности демпфирования колебаний подвижной системы.
Недостатком данной модели является отсутствие гашения колебаний на всех частотах.
В патенте изобретение (№2475658, МПК F16F 7/10, F16F 15/02, 20.02.2013) предложен способ, включающий двухступенчатое гашение вибрации основным и дополнительными элементами. На дополнительную промежуточную платформу прикладывают две силы, направленные в противоположном направлении, обеспечивающие взаимное гашение горизонтальных колебаний. Путем совместного изменения радиусов двух дисбалансов на вибраторы накладывают дополнительные силы для гашения вертикальных сил. Устройство для осуществления способа включает виброзащитную систему, содержащую установленные на промежуточной платформе два регулируемых инерционных вращательных вибратора. На вибраторах установлены два дисбаланса с изменяющимся динамическим воздействием за счет настройки радиуса дисбаланса. Достигается регулирование жесткости виброзащитной системы.
Недостатком данной модели является отсутствие гашения колебаний на всех частотах.
За прототип взят патент на полезную модель (№2440523, МПК F16F 15/04, F16F 7/10, 20.01.2012), предложен способ регулирования жесткости, который заключается в установке пружины с положительной жесткостью и дополнительного упругого элемента в виде вращающихся масс. Вращение масс вокруг вертикальной оси создает центробежные силы, обеспечивающие изменение суммарной жесткости устройства. Вращение масс создает «отрицательную» жесткость, которая зависит от угловой скорости вращения. Виброзащитное устройство содержит упругие дополнительные элементы в виде отдельных масс, соединенных шарнирно с помощью рычагов с основанием и объектом защиты. Достигается упрощение способа гашения вибрации.
Вместе с тем данная полезная модель не обеспечивает динамического гашения колебаний в широком диапазоне.
Цель предлагаемого изобретения заключается в том, чтобы установкой дополнительных инерционных масс обеспечить динамическое гашение колебаний на всех частотах заданного диапазона.
Цель достигается способом, заключающимся в том, что гасят колебания со стороны основания с помощью инерционных масс, расположенных на стыках рычагов, отличающимся тем, что обеспечивают динамическое гашение колебаний в широком диапазоне частот за счет инерционных сил дополнительных масс, установленных в местах соединений нижних рычагов с регулируемым пневмоэлементом.
Устройство для динамического гашения колебаний представляет собой симметричную структуру, включающую пружину, расположенную перпендикулярно основанию, одним концом прикрепленную к вибрирующей поверхности, а другим - к объекту защиты, и ромбовидную систему рычагов, причем в месте соединения нижних и верхних рычагов установлены шарниры, отличающуюся тем, что дополнительно установлены два упругих элемента, расположенных параллельно основанию, один представляет собой пружину с дополнительными массами на концах, соединяющую нижние рычаги ромбовидной системы, другой выполнен в виде пневмоэлемента, предназначенного для регулирования общей жесткости системы, концы которого соединены с продолжениями нижних рычагов и в местах соединения находятся дополнительные массы, обеспечивающие создание инерционных сил, действующих во встречном направлении относительно возмущающих сил основания на всех частотах заданного диапазона.
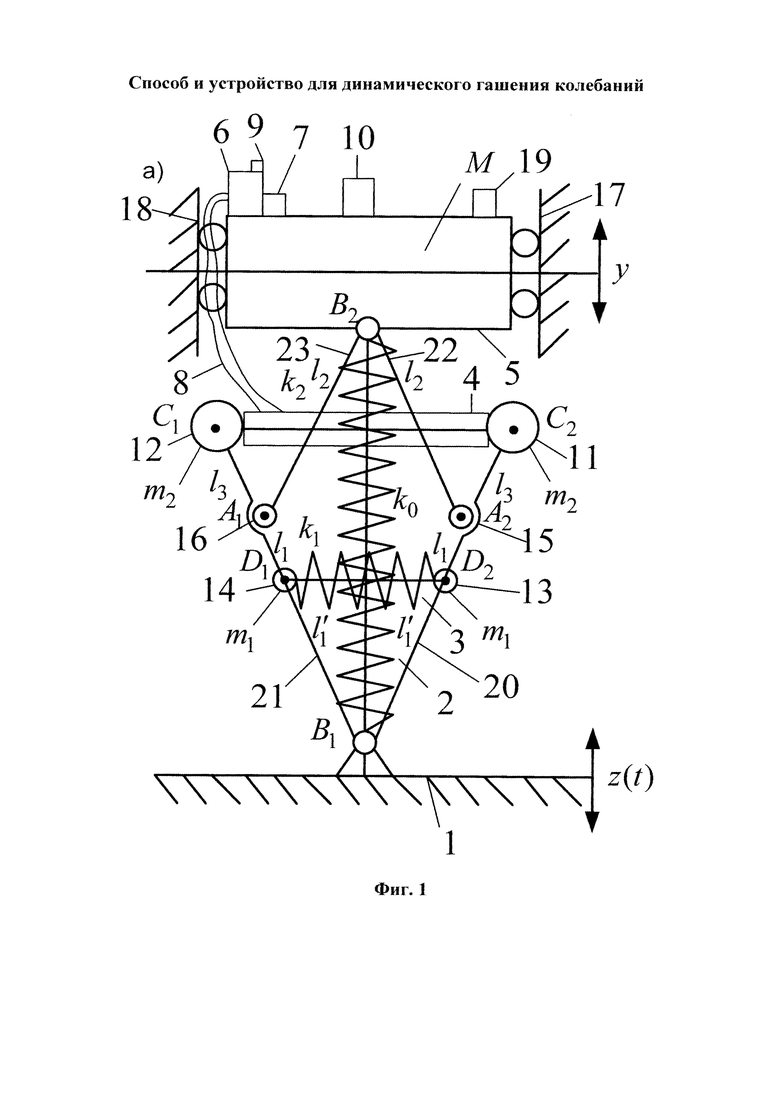
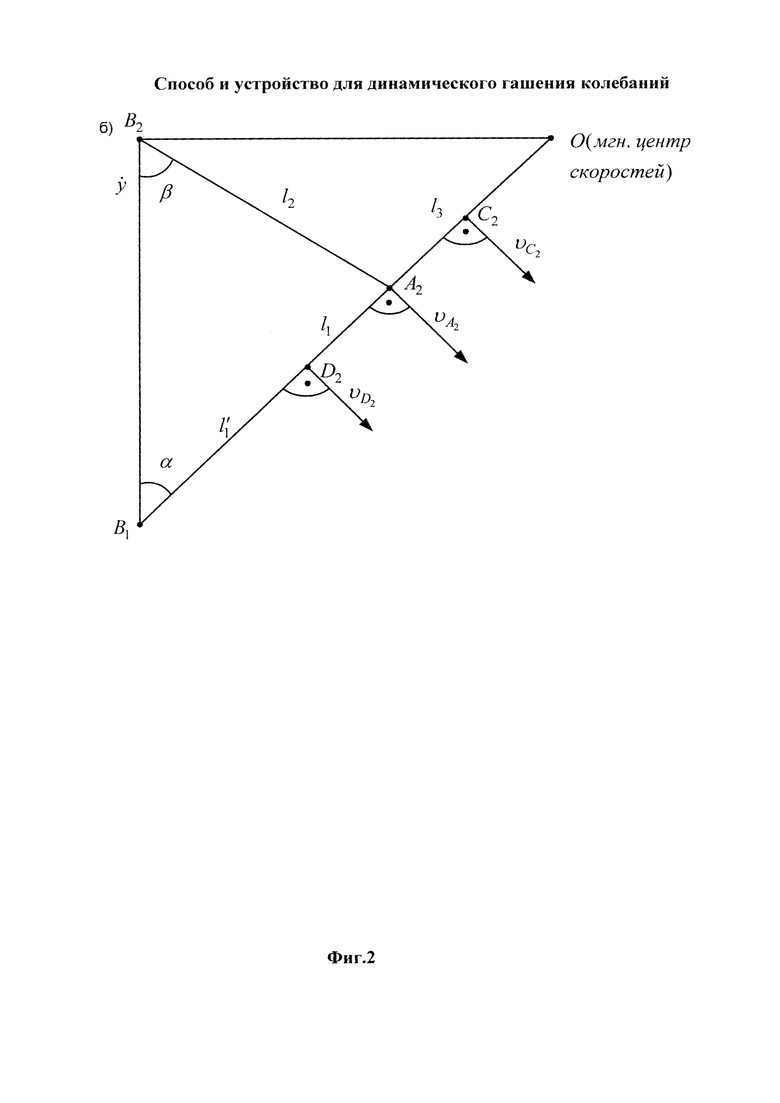
Предлагаемые способ и устройство поясняются чертежами: фиг. 1 - схема устройства для широкополосного динамического гашения колебаний; фиг. 2 - кинематическая схема устройства, фиг. 3 - кинематическая схема соотношений параметров движения при кинематическом возмущении, фиг. 4 - амплитудно-частотная характеристика системы. На фиг. 1 представлены: 1 - основание, 2, 3 - упругие элементы с жесткостями k1, k0, 4 - пневмобаллон, 5 - объект защиты, 6 - компрессор, 7 - блок обработки информации, 8 - трубопровод, 9 - клапан, 10 - датчик, расположенный на объекте защиты, 11, 12, 13, 14 - дополнительные массоинерционные элементы, 15, 16 - шарнирные соединения, 17, 18 - боковые основания, 19 - источник питания компрессора, 20, 21, 22, 23 - рычаги с шарнирами. На фиг. 2 показаны скорость движения элементов, υA2, υC2, υD2, длины элементов l1, l'1,
l2, l3, а также углы между рычагами α и β. На фиг. 3 отражены скорости переносного перемещения  скорости относительного перемещения,
скорости относительного перемещения, 
 а также дополнительные углы α1 и α2. Изобретение заключается в следующем. При возникновении периодических возмущений со стороны основания объект защиты 5 приходит в движение, информация о динамическом состоянии, получаемая от датчика 10, поступает в блок обработки информации 7, информация оценивается и сравнивается с заданным уровнем. Если динамическое состояние не соответствует необходимому уровню, то вручную включается компрессор и изменяет давление в пневмобаллоне 4 до уровня, при котором сигнал от датчика 10 начинает уменьшаться и принимает нулевое значение. При большом давлении избыток вручную сбрасывается через клапан 9. Особенность устройства заключается в том, что при выполнении определенных соотношений между значениями коэффициентов жесткости k0, k1 и k2 с учетом параметров дополнительных масс m1 и m2, а также углов между рычагами 20, 21, 22, 23 динамическое гашение колебаний происходит в широком спектре частот.
а также дополнительные углы α1 и α2. Изобретение заключается в следующем. При возникновении периодических возмущений со стороны основания объект защиты 5 приходит в движение, информация о динамическом состоянии, получаемая от датчика 10, поступает в блок обработки информации 7, информация оценивается и сравнивается с заданным уровнем. Если динамическое состояние не соответствует необходимому уровню, то вручную включается компрессор и изменяет давление в пневмобаллоне 4 до уровня, при котором сигнал от датчика 10 начинает уменьшаться и принимает нулевое значение. При большом давлении избыток вручную сбрасывается через клапан 9. Особенность устройства заключается в том, что при выполнении определенных соотношений между значениями коэффициентов жесткости k0, k1 и k2 с учетом параметров дополнительных масс m1 и m2, а также углов между рычагами 20, 21, 22, 23 динамическое гашение колебаний происходит в широком спектре частот.
Устройство обеспечивает гашение колебаний в широком спектре частот для объекта защиты 5 со стороны основания 1. Объект защиты 5 опирается на симметричную структуру, включающую в себя ромбовидную систему рычагов (20, 21, 22, 23), представляющую собой четырехзвенник, причем в месте соединения нижних (20, 21) и верхних (22, 23) рычагов находятся шарниры (15, 16), отличающуюся тем, что содержит три упругих элемента (2, 3, 4), причем два из них расположены параллельно основанию (3, 4), а один расположен перпендикулярно основанию и является пружиной (2), одним концом прикрепленной к вибрирующей поверхности (1), а другим - к объекту защиты (5), второй представляет собой пружину (3) с массами (13, 14) на концах, соединяющую нижние рычаги (20, 21) выше середины, третий является пневмоэлементом (4), на концах которого находятся дополнительные массы (11, 12), расположенные на продолжении нижних рычагов (20, 21). Предлагаемое устройство имеет компрессор 6 с источником питания 19, который обеспечивает поддержание определенного давления в пневмоэлементе 4, соответствующее жесткости k2, что позволяет регулировать приведенную упругость между объектом защиты и основанием. Трубопровод 8 соединяет компрессор с пневмобаллоном, имеющим клапан для сброса давления 9. Устройство, принципиальная схема которого показана на Фиг. 1, имеет датчик 10 для мониторинга его динамического состояния. Блок 7 предназначен для обработки информации о динамическом состоянии объекта защиты 5 и выдачи показаний о динамическом состоянии объекта защиты (5).
Для реализации предлагаемых способа и устройства разработана математическая модель. Анализ результатов численного моделирования показывает, что установка дополнительных инерционных масс обеспечивает динамическое гашение колебаний в широком диапазоне.
На фиг. 1 показана расчетная схема опорного устройства. Приняты обозначения: В1А1=В1А2=l1; В2А1=В2А2=l2; B1C1=B1C2=l3. В точках C1, C2 и D1, D2 закреплены дополнительные массы m1(D1, D2) и m2(C1, C2), положение которых может синхронно изменяться. В свою очередь, точки D1 и D2 соединены пружиной с жесткостью k1, тт. C1 и C2 - пружиной k2. Объект защиты (М) опирается на пружину жесткостью k0. Кроме того, введены обозначения A1C1=A2C2=l3, при этом углы α и β определяют наклоны стержней l1 и l2 относительно вертикали. Мгновенный центр скоростей звена B2A2 при скорости движения объекта  и при Q(t)≠0 и z(t)=0 показан точкой О на фиг. 2.
и при Q(t)≠0 и z(t)=0 показан точкой О на фиг. 2.
Вид воздействия на объект защиты зависит от того, имеются ли в составе системы механизмы, преобразующие движения составляющих элементов. В этом случае параметры математической модели изменяются, что требует учета ряда особенностей. На фиг. 3 приведена принципиальная схема кинематических соотношений.
Для проведения кинематических расчетов на фиг. 3 вводится дополнительная система координат x0, y0. Что касается рассмотрения движения объекта защиты (М), то его положение определяется координатой у в неподвижном базисе. При кинематическом возмущении элементы механизма участвуют в двух движениях, которые инициируются движением по вертикали тт. B1 и B2, формируя переносное перемещение (обозначения  а также относительное, вызванное движением
а также относительное, вызванное движением 
 Соответствующие компоненты выделяются при рассмотрении перемещений в тт. D1, D2; C1, C2. При определении потенциальной энергии упругих элементов k1 и k2 учитываются только горизонтальные составляющие на оси x0. Составляющие скоростей в относительном и переносном движениях определяются в проекциях на оси x0 и y0 с последующим определением скоростей в абсолютном движении. Для получения скоростей движения точек элементов используется понятие о мгновенном центре скоростей.
Соответствующие компоненты выделяются при рассмотрении перемещений в тт. D1, D2; C1, C2. При определении потенциальной энергии упругих элементов k1 и k2 учитываются только горизонтальные составляющие на оси x0. Составляющие скоростей в относительном и переносном движениях определяются в проекциях на оси x0 и y0 с последующим определением скоростей в абсолютном движении. Для получения скоростей движения точек элементов используется понятие о мгновенном центре скоростей.
Кинетическая энергия системы определяется выражением

где i=l1/l2,  i3=l4/l1, i4=l5/l1, углы α1 и α2 могут быть найдены по кинематической схеме на фиг. 3.
i3=l4/l1, i4=l5/l1, углы α1 и α2 могут быть найдены по кинематической схеме на фиг. 3.
Выражение для потенциальной энергии имеет вид

Кинетическая энергия (2) может быть записана в детализированном виде:
Используя уравнение Лагранжа 2-го рода, можно получить уравнение движения

При использовании преобразования Лапласа можно найти передаточную функцию системы

Для дальнейших расчетов используются зависимости между параметрами системы α, β и др., которые определяют значения углов α1 и α2, а также расстояния l1 и l5 до мгновенного центра скоростей O2.
Выражение для передаточной функции (5) можно преобразовать к виду

Здесь 



Значения коэффициентов R1÷R4 определяют динамические свойства исходной системы. При этом R1=0 определяет граничные условия для выбора настроечных параметров.
1. Соотношение, характеризующее связь параметров системы при R1=0, представлено в виде

2. При R1=0 возможно «зануление» коэффициента R2, так как при достижении такого равенства числитель передаточной функции может стать равным нулю, что соответствует представлениям о возможностях системы поглощать внешние воздействия. Объект защиты при этом остается неподвижным во всем частотном диапазоне.
Выражение (12) показывает соотношение параметров системы при R2=0.

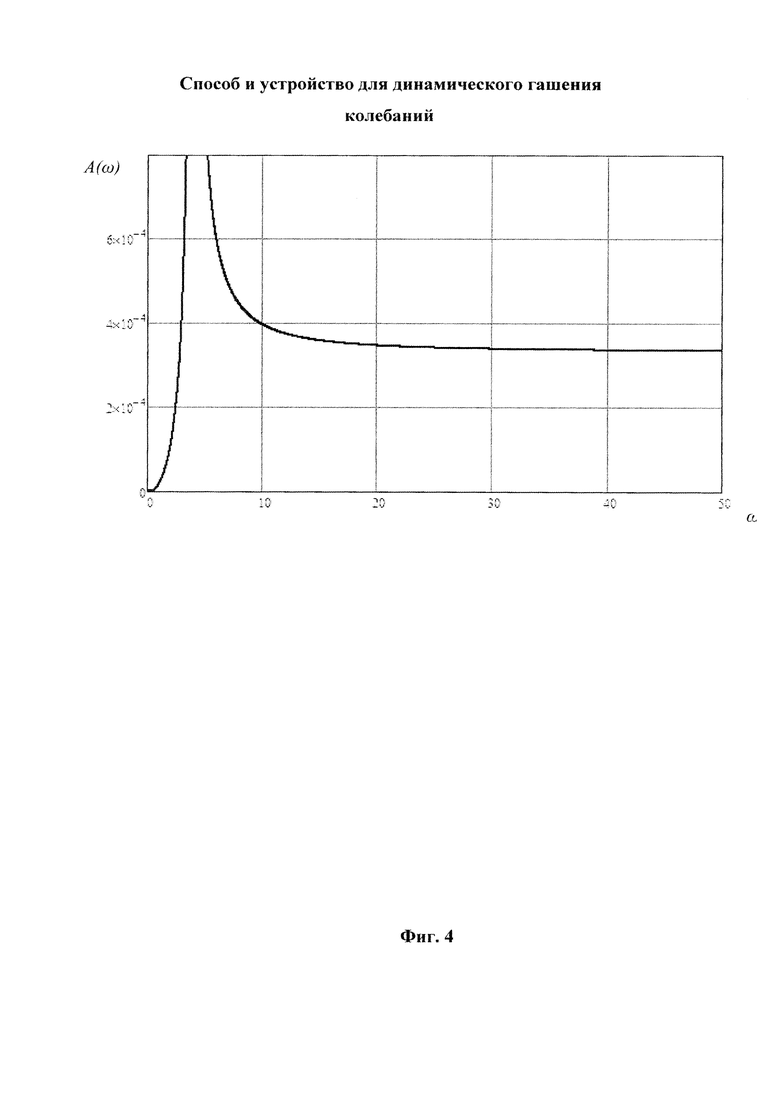
3. Если R1 и R2 в числителе передаточной функции (13) одновременно равны нулю при определенном соотношении параметров механической колебательной системы, то амплитудно-частотная характеристика (АЧХ) не реализуется. В этом случае движение основания приводит к взаимодействиям массоинерционных элементов симметричного механизма. При этом движение объекта не происходит, так как возникает режим динамического гашения. Аналитическое определение этих условий затруднено из-за сложности тригонометрических выражений, однако задача может быть решена численным моделированием. На фиг. 4 представленная АЧХ системы, для которой получены значения R1 и R2, близкие к нулю, в частности R1=0.006, R2=0.002. Амплитудно-частотная характеристика на фиг.4 отражает динамические свойства системы, в том числе и резонансные эффекты, которые будут наблюдаться и при малых значениях R1 и R2. Выражение (13) представляет собой детализированную передаточную функцию. Если R1 и R2 малы, но не равны нулю одновременно, то необходимо учитывать возникновение режима резонанса и «запирания» системы на высоких частотах, тогда зона устойчивого снижения амплитуды собственных колебаний будет находиться в зарезонансной области, в которой коэффициент передачи колебаний будет постоянным малым числом, что можно интерпретировать как специфичный режим динамического гашения.

При численном моделировании приняты следующие значения параметров: M=20 кг; m1=4,21 кг; m2=0,5 кг; k1=10 Н/м; k2=140 Н/м; k3=98,36 Н/м; l1=0,5 м; l2=0,5 м; l3=0,5 м; 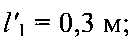 α=β=45°.
α=β=45°.
При помощи математической модели была построена амплитудно-частотная характеристика, анализ которой показывает, что возможным является снижение уровня вибраций до очень малых значений. При R1=0 и R2=0 специфичный режим динамического гашения распространяется на весь частотный диапазон, который будет иметь общую точку, в которой отношение амплитуд точечно могут принимать большие значения. Таким образом объект защиты может находится в неподвижном состоянии в широком диапазоне частот внешнего возмущения. Поднастройка динамического состояния системы может осуществляться за счет изменения жесткости пневмоэлемента k2 с использованием системы автоматического отслеживания состояния объекта.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления формированием режимов динамического гашения колебаний и устройство для его реализации | 2017 |
|
RU2654276C1 |
| СПОСОБ УПРАВЛЕНИЯ РЕЖИМАМИ ДИНАМИЧЕСКОГО ГАШЕНИЯ КОЛЕБАНИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2017 |
|
RU2676116C2 |
| Способ динамического гашения колебаний технического объекта и устройство для его реализации | 2017 |
|
RU2668887C1 |
| Способ управления динамическим состоянием подвески транспортного средства и устройство для его реализации | 2018 |
|
RU2690135C1 |
| УСТРОЙСТВО ДЛЯ ГАШЕНИЯ КОЛЕБАНИЙ | 2012 |
|
RU2498126C2 |
| СПОСОБ УПРАВЛЕНИЯ И ИЗМЕНЕНИЯ ДИНАМИЧЕСКОГО СОСТОЯНИЯ ВИБРОЗАЩИТНОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2018 |
|
RU2696062C1 |
| СПОСОБ ОДНОВРЕМЕННОГО ДИНАМИЧЕСКОГО ГАШЕНИЯ КОЛЕБАНИЙ ЭЛЕМЕНТОВ МЕХАНИЧЕСКОЙ ЦЕПИ | 2016 |
|
RU2648661C1 |
| Способ и устройство одновременного динамического гашения колебаний объекта защиты по двум степенями свободы | 2017 |
|
RU2700942C1 |
| Способ управления структурой вибрационного поля вибрационной технологической машины на основе использования эффектов динамического гашения и устройство для его осуществления | 2016 |
|
RU2624757C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЖЕСТКОСТИ ВИБРОЗАЩИТНОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2440523C2 |
Группа изобретений относится к области машиностроения. Колебания гасят со стороны основания с помощью инерционных масс, расположенных на стыках рычагов. Обеспечивают расширение диапазона частот гашения колебаний за счет инерционных сил дополнительных масс, установленных в местах соединений нижних рычагов с регулируемым пневмоэлементом. Устройство содержит пружину, расположенную перпендикулярно основанию. Ромбовидная система рычагов содержит шарниры в местах соединения нижних и верхних рычагов. Пружина соединяет нижние рычаги ромбовидной системы и расположена параллельно основанию. Пневмоэлемент регулирует общую жесткость системы и расположен параллельно основанию. Концы пневмоэлемента соединены с продолжениями нижних рычагов. Дополнительные массы расположены в местах соединений и обеспечивают создание инерционных сил, действующих во встречном направлении относительно возмущающих сил основания на всех частотах заданного диапазона. Достигается расширение диапазона частот динамического гашения колебаний. 2 н.п. ф-лы, 4 ил.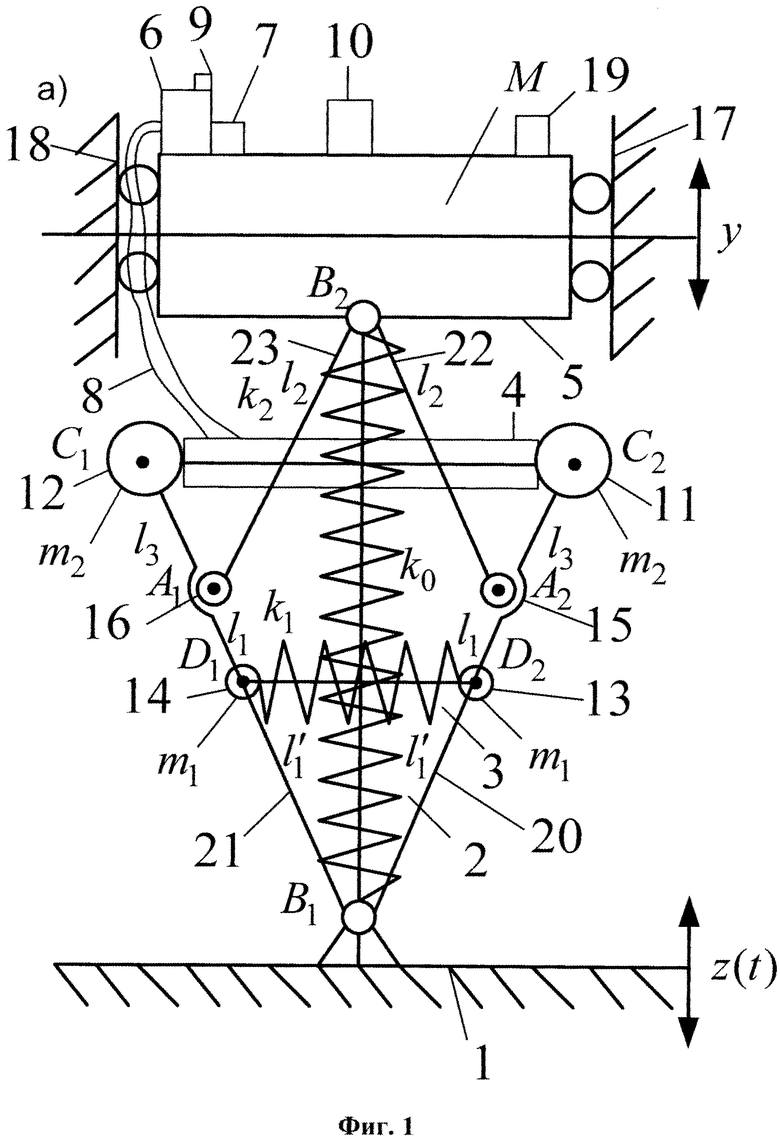
1. Способ динамического гашения колебаний, заключающийся в том, что гасят колебания со стороны основания с помощью инерционных масс, расположенных на стыках рычагов, отличающийся тем, что обеспечивают динамическое гашение колебаний в широком диапазоне частот за счет инерционных сил дополнительных масс, установленных в местах соединений нижних рычагов с регулируемым пневмоэлементом.
2. Устройство для динамического гашения колебаний, содержащее пружину, расположенную перпендикулярно основанию, одним концом прикрепленную к вибрирующей поверхности, а другим - к объекту защиты, и ромбовидную систему рычагов, причем в месте соединения нижних и верхних рычагов установлены шарниры, отличающееся тем, что дополнительно установлены два упругих элемента, расположенных параллельно основанию, один представляет собой пружину с дополнительными массами на концах, соединяющую нижние рычаги ромбовидной системы, другой выполнен в виде пневмоэлемента, предназначенного для регулирования общей жесткости системы, концы которого соединены с продолжениями нижних рычагов и в местах соединения находятся дополнительные массы, обеспечивающие создание инерционных сил, действующих во встречном направлении относительно возмущающих сил основания на всех частотах заданного диапазона.
| СПОСОБ РЕГУЛИРОВАНИЯ ЖЕСТКОСТИ ВИБРОЗАЩИТНОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2440523C2 |
| US 4972930 A, 27.11.1990 | |||
| US 5443282 A, 22.08.1995 | |||
| Устройство для накатки зубчатых колес | 1960 |
|
SU142137A1 |

