Известны ультразвуковые эхо-локаторы для слепых, содержащие электроакустический преобразователь, генератор, усилитель, коммутатор, электродвигатель, блок тактильных раздражителей и автономиый источник иитания.
Предлагаемый ультразвуковой эхо-локатор для слепых в отличие от известных снабжен интегратором эхо-сигнала, фотоэлектрическим блоком обработки и блоком синхронизации. Фотоэлектрический блок обработки включает в себя электростатический генератор, редуктор эхо-сигналов и кодовый диск со свеговой и фотолинейками, а блок синхронизации содержит диск синхронизации, источник света, фотоириемник, дифференцирующий усилитель и триггер.
Это позволяет повысить помехоустойчивость прибора, а также увеличить экеплуатацнонную надежноеть и экономичность.
На чертеже изображеиа блок-схема предлагаемого ультразвукового эхо-локатора для слепых.
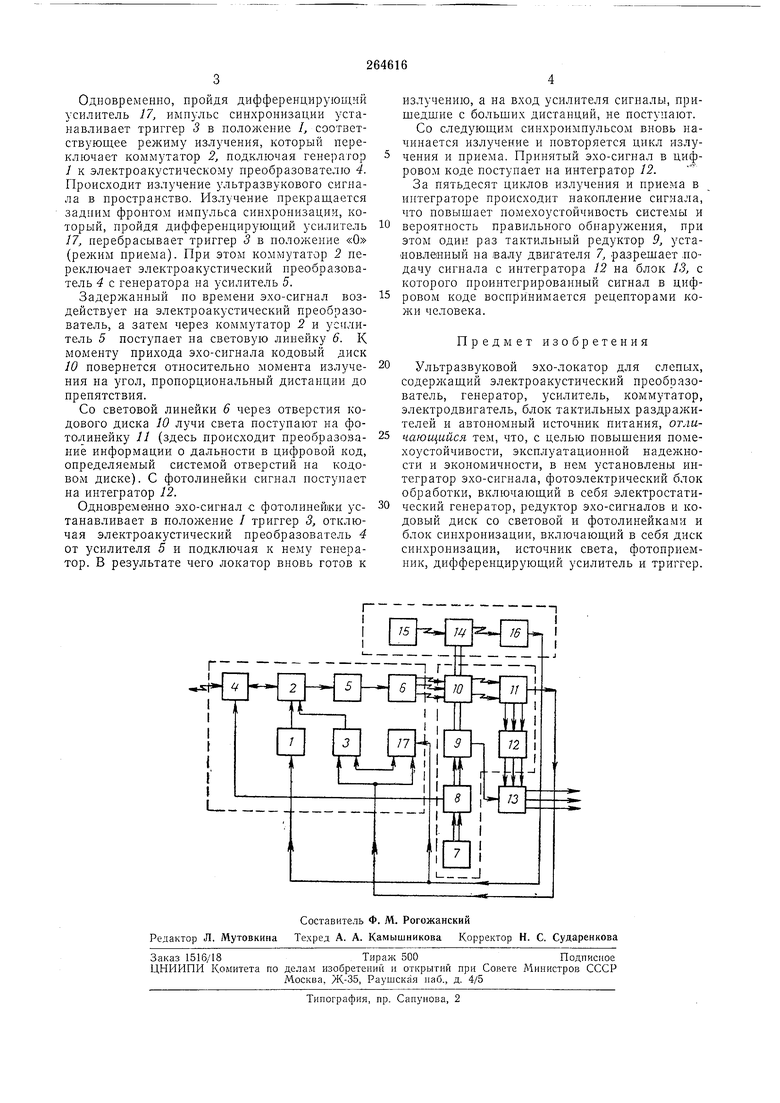
Он содержит приемо-передающий блок, включающий в еебя генератор 1, сигнал с которого через коммутатор 2, управляемый триггером 3, поступает на электроакустический преобразователь 4. Эхо-сигиал с электроакустического преобразователя через ком.мутатор поступает на усилитель 5, с которым связана световая линейка 6.
Фотоэлектрический блок обработки включает в себя двигатель 7, на валу которого установлены диск электростатичеекого генератора 8, редуктор эхо-сигналов 9 и кодовый диек }0, Нроизводящий нреобразованиеинформации о дальности до иреиятствия со световой линейки 6 на фотолинейку //, с которой сигнал в цифровом коде поступает на ;нтегратор 12. С интегратора 12 сигнал в цифровом коде постуиает в блок 13 эхо-сигнала.
Блок синхронизации содержит диск 14 синхронизации, установленный на валу двигателя 7, источник 15 света и фотонриемник 16, с которого сигнал поступает па дифференцирующий усилитель 17, а с него - на триггер 3.
Предлагаемый ультразвуковой локатор работает следующим образом. После включения питания вал двигателя 7 начинает вращаться. Электростатический генератор 5 начинает вырабатывать высокое напряжение для питания электроакустического преобразователя 4. Пмпульс синхронизации, унрав,1яющий работой локатора, возникает при прохождении луча от источника /5 света через отверстие диска 14 синхронизации на фотоприемник 16 и подается на геиератор /, который возбуждается.
Одновременно, пройдя дифференцирующий усилитель 17, импульс синхронизации устанавливает триггер t3 в положение I, соответствующее режиму излучения, который переключает коммутатор 2, подключая генератор / к электроакустическому преобразователю 4. Происходит излучение ультразвукового сигнала в пространство. Излучение прекращается задним фронтом импульса синхронизации, который, пройдя дифференцирующий усилитель 17, перебрасывает триггер 3 в положение «О (режим приема). При этом коммутатор 2 переключает электроакустический преобразователь 4 с генератора на усилитель 5.
Задержанный по времени эхо-сигнал воздействует па электроакустический преобразователь, а затем через коммутатор 2 и усилитель 5 поступает па световую линейку 6. К моменту прихода эхо-сигнала кодовый диск 10 повернется относительно момента излучения на угол, пропорциональный дистанции до препятствия.
Со световой линейки 6 через отверстия кодового диска 10 лучи света поступают на фотолинейку // (здесь происходит преобразование информации о дальности в цифровой код, определяемый системой отверстий на кодовом диске). С фотолипейки сигнал поступает на интегратор 12.
Одновременно эхо-сигнал с фотолпнейки устанавливает в положение / триггер 3, отключая электроакустический преобразователь 4 от усилителя 5 и подключая к нему генератор. В результате чего локатор вновь готов к
излучению, а на вход усилителя сигналы, пришедшие с больших дистанций, не поступают.
Со следующим синхроимпульсом вновь начинается излучение и повторяется цикл излучения и приема. Принятый эхо-сигнал в цифровом коде поступает на интегратор 12.
За пятьдесят циклов излучепия и приема в интеграторе происходит накопление сигнала, что повышает помехоустойчивость системы и вероятпость правильного обнаружения, при этом один раз тактильный редуктор 9, установлееный на валу двигателя 7, разрешает лодачу сигнала с интегратора 12 на блок 13, с которого проинтегрированный сигнал в цифровом коде воспринимается рецепторами кожи человека.
Предмет изобретения
Ультразвуковой эхо-локатор для слепых, содержащий электроакустический преобразователь, генератор, усилитель, коммутатор, электродвигатель, блок тактильных раздражителей и автономный источник питания, отличающийся тем, что, с целью повышения помехоустойчивости, эксплуатационной надежности и экономичности, в нем установлены интегратор эхо-сигнала, фотоэлектрический блок обработки, включающий в себя электростатический генератор, редуктор эхо-сигналов и кодовый диск со световой и фотолинейками и блок синхронизации, включающий в себя диск синхронизации, источник света, фотоприемник, дифференцирующий усилитель и триггер.
| название | год | авторы | номер документа |
|---|---|---|---|
| Ультразвуковой локатор для слепых | 1982 |
|
SU1053829A1 |
| Устройство для считывания графической информации | 1984 |
|
SU1185360A1 |
| ПУТЕВОДИТЕЛЬ ДЛЯ СЛЕПЫХ | 1991 |
|
RU2068678C1 |
| ЭХОЛОКАТОР | 1990 |
|
RU2020511C1 |
| УЛЬТРАЗВУКОВОЙ ЭХО-ЛОКАТОР ДЛЯ СЛЕПЫХ | 1969 |
|
SU254011A1 |
| УЛЬТРАЗВУКОВОЙ ЛОКАТОР ДЛЯ СЛЕПЫХ | 1992 |
|
RU2040234C1 |
| Устройство для эхолокационного контроля скважин | 1979 |
|
SU918913A1 |
| Система передачи и приема информации | 1987 |
|
SU1411795A1 |
| РАДИОЛОКАЦИОННЫЙ ПРИБОР ПРОСТРАНСТВЕННОЙ ОРИЕНТАЦИИ ДЛЯ СЛАБОВИДЯЩИХ И СЛЕПЫХ ЛЮДЕЙ | 2018 |
|
RU2679924C1 |
| Ультразвуковое устройство для контроля качества материалов | 1984 |
|
SU1254370A1 |
