Изобретение относится к медицинской технике, а именно л устройствам для ориентации слепых н п|эостранстве.
Известен ультразвуковой локатор для слепых, состояший из передатчика ультразвуковых импульсов, приемного логического индикаторного устройства Г .
Однако извес ный ультразвуковой прибор имеет значительную погрешность при определении расстояния до объекта, расположенного в пределах 1-2 м от слепого.
Наиболее близким к предлагаемому является ультразвуковой локатор для слепых, содержащий последовательно соединенные электроакустический преобразователь, приемник, мультивибратор, передатчик и индикаторное устройство, подключенное к выходу мультивибратора L2 ,
Однако в известном ультразвуковом локаторе для слепых частота повторения импульсов передатчика слабо зависит от дальности, что приводит к большим погрешностям при определении малых расстояний до препятствий.
Цель изобретения - повышение точности определения расстояния до препятствия путем выделения ближней и дальней зон.
Поставленная цель достигается тем, что ультразвуковой локатор для сэтепых, содержащий последовательно соединенные .электроакустический пре образователь, приемник, мультивибратор, передатчик и индикаторное устройство, подключенное к выходу мультивибратора, снабжен блоком масштабного измерения интервалов времени, включенным между приемником и мультивибратором, а индикаторное устройство выполнено в виде звукового сигн,лизатора .и двух тактильных датчиков, связанных через логическую схему с выходом мультивибратора.
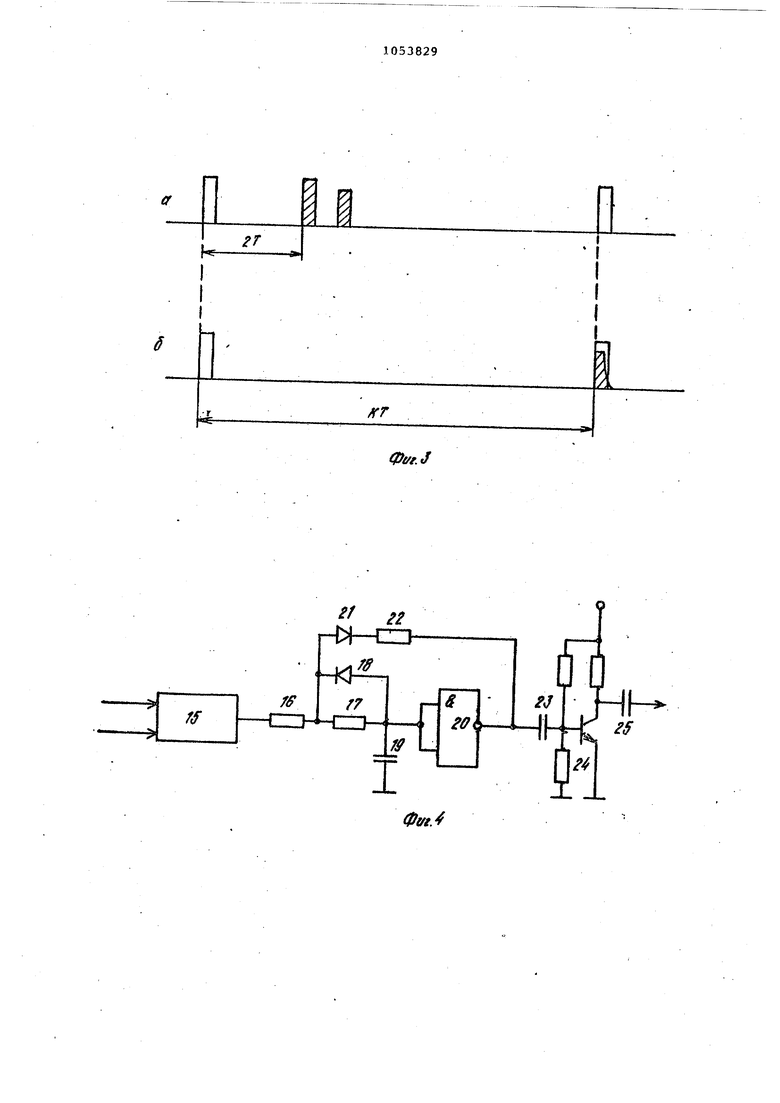
При этом блок масштабного измерения интервалрв времени может быть вы полней из по следовательно соединенных триггера КС-цепи, пороговой схемы с формирователем импульсов,причем вход триггера подключен к выходу приемника, а выход пороговой схемы - с входом мультивибратора.
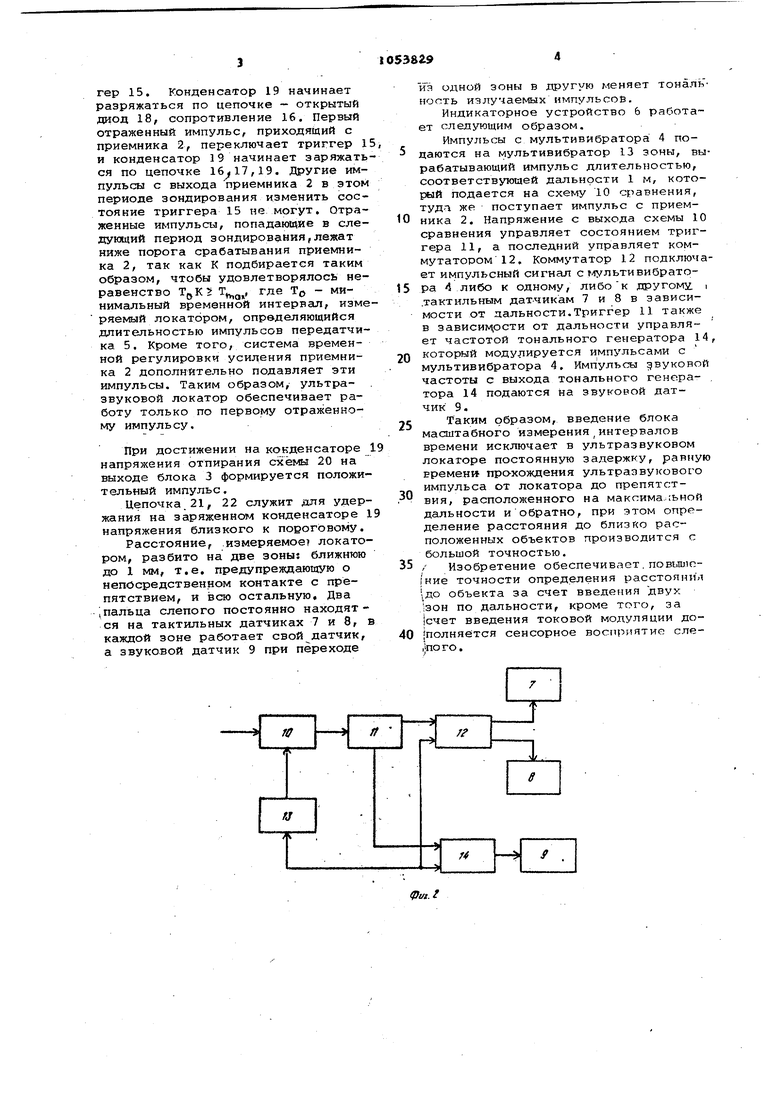
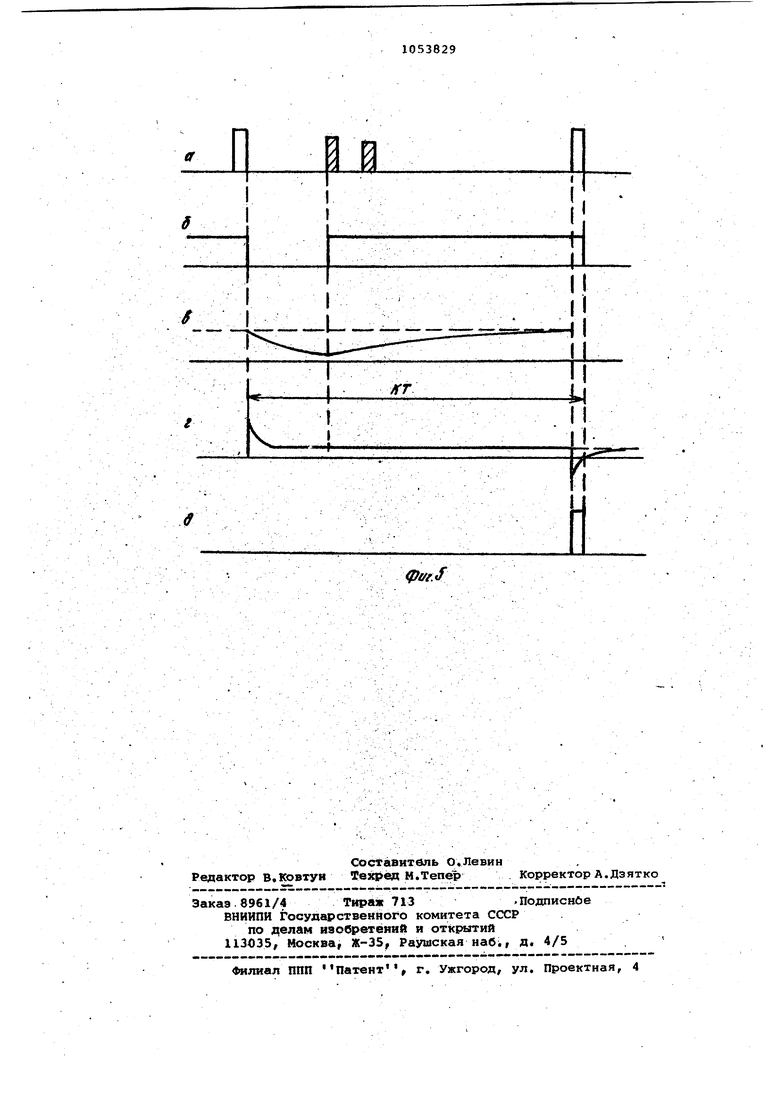
На фиг, 1 изображена фун1«циональ ная схема ультразвукового локатора для слепых; на фиг. 2 - блок-схема индикаторного устройства; на фиг, 3 временные диаграммы, поясняющие работу ультразвукового локатора для слепых; на фиг, 4 - схема блока масштабного измерения интервалов времени; на фиг, 5 - временные диаграммы, поясняющие работу блока масштабного измерения интервалов времени,
Ультразвуковой локатор для слепы содержит электроакустический преобразователь 1, приемник 2, блок масштабного измерения интервалов времени 3, мультивибратор 4,передатчик 5 -и индикаторное устройство б. Индикаторное устройство состоит из двух тактильных датчиков 7 и 8,звукового датчика 9 и логической схемы состоящей из схемы сравнения 10,тригера 17, коммутатора 12, мулвтивибратора зоны 13, тонального генератора 14, Блок масштабного измерения интервалов времени состоит из триггера 15, КС-цепи, включающей резисторы 16 и 17, диод 18 и конденсатор 19, пороговой схемы, состоящей из элемента И-НЕ 20, диода 21, резистора 22, с формирователем выходных импульсов, включающим дифференцирующую цепочку из конденсатора 23 и резистора 24 и усилительного каскада на транзисторе 25,
Ультразвуковой локатор для слепы работает рледующим образом,
При отсутствии препятствий мультвибратор 4 находится в автоколебательном режиме с частотой повторени примерно 1,5 Гц и вырабатывает корокие импульсы, запускающие передатчик 5. При наличии препятствий ультзвуковые .импульсы, отраженные от ни преобразованные электроакустическим преобразовгателем 1 в электрические и усиленные приемником 2, попадают на блок 3 масштабного измерения интервалов времени, В блоке 3 временное расстояние между зондирующим импульсом передатчика 5 и отраженным импульсом на выходе приемника- 2 преобразовывается в масштабный коэффициент К, Импульс с выхода блока 3 запускает мультивибратор 4, который при наличии отраженных сигналов уже работает как ждущий, так как период его собственных колебаний больше -2 Т)ду . Импульс мультивибратора 4 запускает передатчик 5 и цикл повторяется. Таким образом, локатор работает как генератор импульсов, частота которых зависит от дальности. Частота мультивибрато ра 4, как и передатчика 5, несет информацию о дальности до ближайшего препятствия и выражается фор
мулой
i
2ТК
Выражая время через дальность D и скорость распространения ультра-/ звука 1, .окончательно получим
iJ-L.
2DK
Работа блока 3 масштабного измерения интервалов времени поясняется эпюрами напряжений (фиг, 5), Импульсы с мультивибратора 4, запус ающие передатчик 5, обнуляюттригrep 15. Конденсатор 19 начинает разряжаться по цепочке - открытый диод 18, сопротивление 16. Первый отраженный импульс, приходящий с приемника 2, переключает триггер 1 и конденсатор 19 начинает заряжаться по цепочке 16,,17,19. Другие импульсы с выхода приемника 2 в этом периоде зондирования изменить состояние триггера 15 не могут. Отраженные импульсы, попадающие в следующий период зондирования,лежат ниже порога срабатывания приемника 2, так как К подбирается таким образом, чтобы удовлетворялось неравенство T(jK , где TO - минимальный временной интерваш, измеряемый локатором, определяющийся длительностью импульсов передатчика 5. Кроме того, система временной регулировки усиления приемника 2 дополнительно подавляет эти импульсы. Таким образом, ультразвуковой локатор обеспечивает работу только по первому отраженному импульсу.
При достижении на конденсаторе напряжения отпирания схемы 20 на выходе блока 3 формируется положительный импульс.
Цепочка.21, 22 служит для удержания на заряженно л конденсаторе 1 напряжения близкого к пороговому.
Расстояние, .измеряемое локатором, разбито на две зоны: ближнюю до 1 мм, т.е. предупреждающую о непосредственном контакте с препятствием, и всю остальную. Два ,пальца слепого постоянно находятся на тактильных датчиках 7 и 8, в каждой зоне работает свой датчик, а звуковой датчик 9 при переходе
иа одной зоны в другую меняет тональ ность излучаемых нмпульсой.
Индикаторное устройство 6 работает следующим образом.
Импульсы с мультивибратора 4 по5 даются на мультивибратор 13 зоны, вырабатывающий импульс длительностью, соответствующей дальности 1 м, который подается на схему 10 сравнения, туда же поступает импульс с прием0 ника 2. Напряжение с выхода схемы 10 сравнения управляет состоянием триггера 11, а последний управляет коммутатором 12. Коммутатор 12 подключает импульсный сигнал с г/ льтивибрато5 pa 4 либо к одному, либо к другому, i .тактильным дат-чикам 7 и 8 в зависимости от дальности.Триггер 11 также в зависи1 ости от дальности управляет частотой тонального генератора 14,
Q который модулируется импульсами с
мультивибратора 4. Импульсы двуковой частоты с выхода тонального генера- , тора 14 подаются на звуковой датчик 9.
5 Таким образом, введение блока масштабного измерения интервалов времени исключает в ультразвуковом локаторе постоянную задержку, равную Еремен прохождения ультразвукового импульса от локатора до препятст0вия, расположенного на максима1;ьной дальности и обратно, при этом определение расстояния до близко расположенных объектов производится с большой точностью.
5 / Изобретение обеспечивает, повьтшп|ние точности определения расстоянил до объекта за счет введения двух |3он по дальности, кроме того, за |счет введения токовой модуляции до0 полняется сенсорное восприятие слеpjnoro.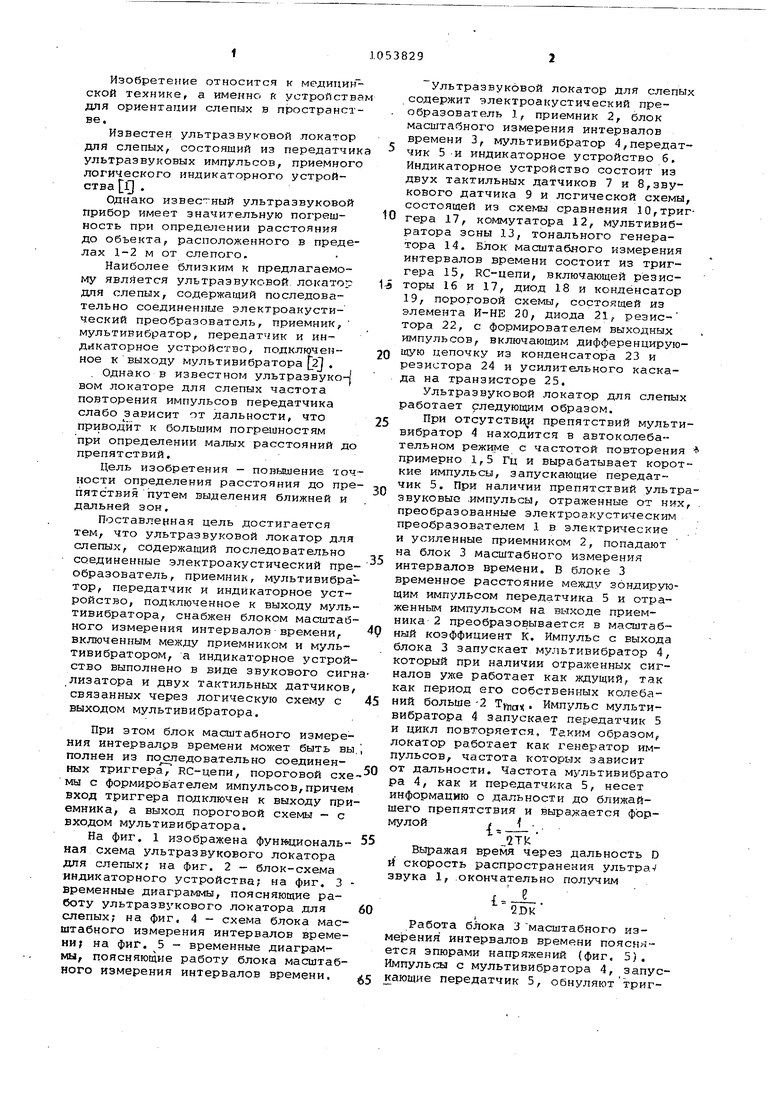
| название | год | авторы | номер документа |
|---|---|---|---|
| Ультразвуковой локатор для слепых | 1986 |
|
SU1313440A1 |
| УСТРОЙСТВО ДЛЯ ОРИЕНТАЦИИ СЛЕПЫХ | 1993 |
|
RU2049455C1 |
| РАДИОЛОКАЦИОННЫЙ ПРИБОР ПРОСТРАНСТВЕННОЙ ОРИЕНТАЦИИ ДЛЯ СЛАБОВИДЯЩИХ И СЛЕПЫХ ЛЮДЕЙ | 2018 |
|
RU2679924C1 |
| УЛЬТРАЗВУКОВОЙ ЛОКАТОР ДЛЯ СЛЕПЫХ | 1992 |
|
RU2040234C1 |
| СВЧ СТЕРЕОРАДАР ДЛЯ СЛЕПЫХ | 2018 |
|
RU2679470C1 |
| СИГНАЛИЗАТОР ПРЕПЯТСТВИЙ | 1973 |
|
SU408640A1 |
| УЛЬТРАЗВУКОВОЙ ЭХОЛОКАТОР | 1969 |
|
SU240504A1 |
| ПРИБОР ДЛЯ ОРИЕНТАЦИИ В ПРОСТРАНСТВЕ ЛЮДЕЙ, ЛИШЕННЫХ ЗРЕНИЯ | 2006 |
|
RU2305525C1 |
| Акустический профилемер подземных полостей, заполненных жидкостью | 1989 |
|
SU1786458A1 |
| ОПТИЧЕСКИЙ ЛОКАТОР ДЛЯ ЛЮДЕЙ С ОСЛАБЛЕННЫМ ЗРЕНИЕМ | 2000 |
|
RU2185801C2 |
1. УЛЬТРАЗВУКОВОЙ ЛОКАТОР ДЛЯ СЛЕШХ, соде мкащий последовательно соединенные электроакустический преобразователь, приемник, мультивибратор, передатчик и индикаторное устройство; подключенное к выходу мультивибратора, о тл и чаю ще ее я тем, что, с целью повышения точности определения расстояния до препятствия путем выделения ближней и дальней зон, он снабжен блоком масштабного измерения интервалов времени, включенным между приемником и мультивибраторе, а индикаторное устройство выполнено в виде звукового сигнализатора и двух тактильных датчиков, связанных через логическую схему с выходом мультивибратора. 2. Локатор по П.1, о т л и ч а-, ю щ и и .с я тем, что блок масштабного измерения интервалов времени выполнен из последовательно соединенi ных триггера, RC-цепи, порого вой схемы с формирователем импульсов, (Л С -при этом вход триггера подключен .к выходу приемника, а выход пороговой схемы - с входом мультивибратора. in : эо э х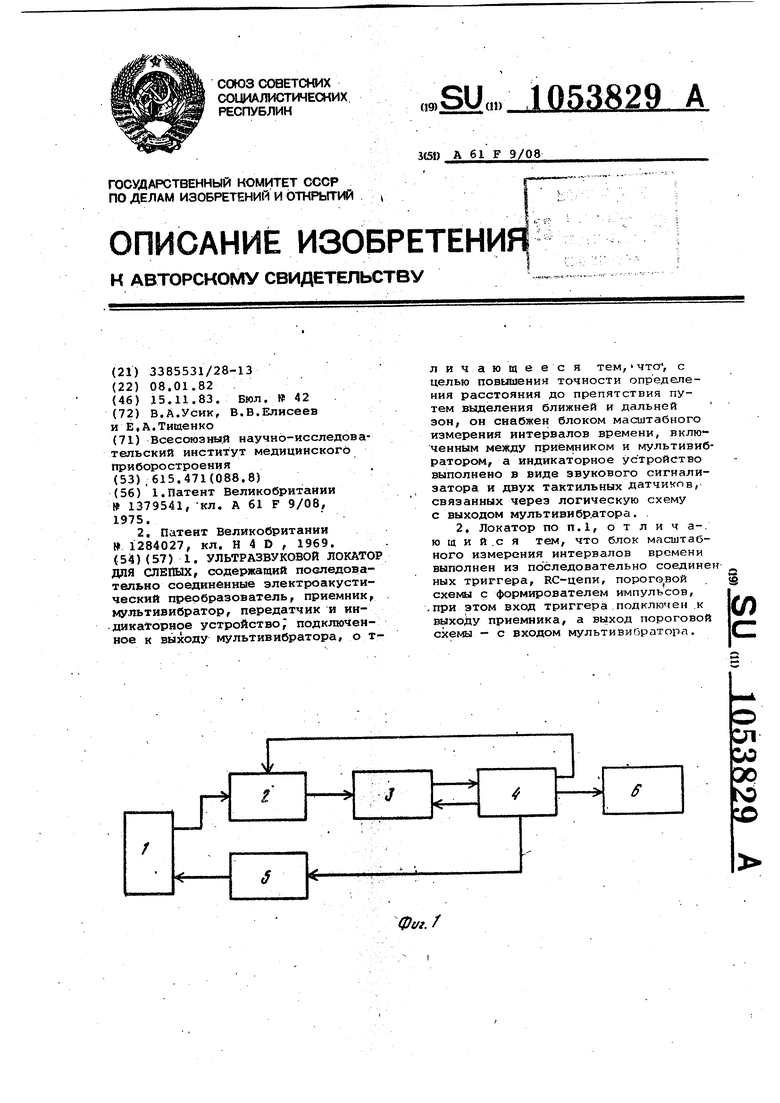
фуг. /
ФУ1. гг
фуг.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для сортировки каменного угля | 1921 |
|
SU61A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
