Известны ycTipoHCTBa для адаптивной дискретизации лри измерении фувкдионально зависимых величин, содержащие датчик значений измеряемой функции, преобразователь напряжение - .код, решающий блок, схему управления, схему юравнен.ия.
Предлагаемое устройство отличается от известных тем, что оно содержит s решающем блоке блоки вычисления первой и второй конеч,ной разности, соединенные последовательно и подключенные к блоку управления, вход первого блока цодсоединен к выходу преобразователя .напряжение - код, а выход второго блока подключен к первому входу схемы сравнения, второй вход которой соединен с выходами регистра хранения допустимой ош.ибки, а ее выход - ко входу управляемого генератора тактовых импульсов; выход последнего соединен с блоком управления, выход схемы сравнения также .подключен к цервым вхо.дам первого и (Второго ключей, вторые входы которых подсоединены 1соответственно с выходом преобразователя и выходом третьего ключа, первый ВХО.Д которого соединен с выходом преобразователя напряжение - код, а второй - с выходом датчика времени.
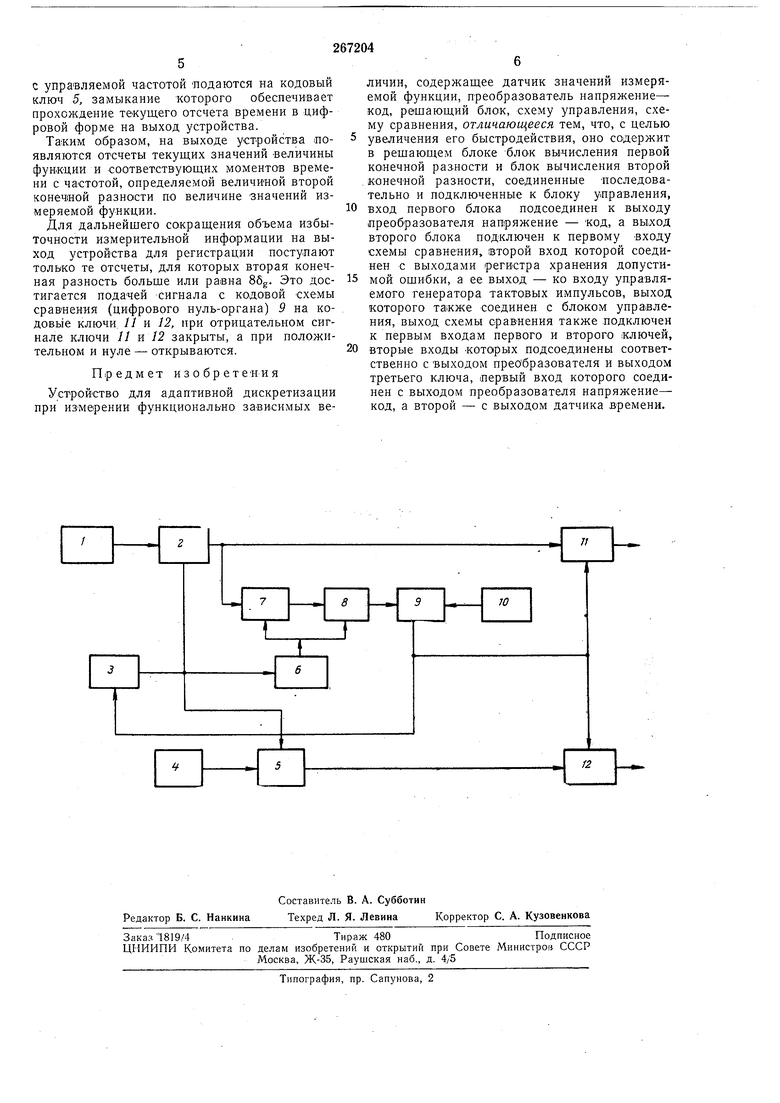
На чертеже представлена блок-схема устройства адаптивной дискретизации для времен ных функций. Устройство содержит датчик / значе.ний
функции, преобразователь 2 напряжение - КОД, управляемый генератор 5 тактовых имлульсов, цифровой датчик 4 времени, .ключ 5, схему 6 управления блоками 7 и 5 (блок 7 - вычисления первой конечной разности и блок
8 вычисления второй конечной разности), схему 9 сравнения, регИСТ1р 10 хранения ошибок, ключи 11 и 12.
В описании приняты следующие обозначения:
(t) - измеряемая функция; Y(f(t) - восстанавливающая функция; t--текущее значение времени; М - величина овинта по времени; б - текущая погрешность линейной интерпо.ляции; б - допустимая погрешность линейной интерполяции; - вторая конечная разность по уровню функции.
Если использовать приближенное дифференцирование, т. е. заменить дифференцирование на отношение конечных разностей функции и аргумента: то текущая погрешность линейной интерполяции может быть представлена следующим соотнощением: , Д2К(Д ° (ДО 8 8 Тогда в момент сравнения текущей погрешности линейного интерполирования с допустимой логрещностью имеем выражение Ь„ : о Для удобства применения в реальных схемах последнюю формулу можно представить в виде: 8 л 2 V Jg L I , На основе полученного результата алгоритм устройства может быть за-писан следующим образом: 1) Начинается равномерная во В1ремени дискретизация измеряемого процесса, т. е, измеряются значения функции и соответствующие им моменты времени. Частота измерений выбирается завыщенная (например, но 30 формуле F У о M(t) -максималь ное значение второй производной на всем временном интервале значений функции.35 2) Вычисляется в каждой точке отсчета Д27 и сравнивается с 86g. 3) Если в результате сравнения ., то выдается команда на уменьщение частоты отсчетов (что в дальнейшем повлечет за собой 40 увеличение ). 4)Если в результате сравнения , то выдается команда на увеличение частоты отсчетов (что в дальнейшем повлечет за собой уменьшение ). 5)В случае дискретизация продолжается с частотой. Таким образом, частота дискретизации исследуемого процесса на данном временном интервале определяется именно свойствами са- 50 мого процесса,, т. е. получается адаптивная дискретизация, осуществляемая методом регулирования величин кванта дискретизации по величине второй производной исследуемого процесса. Учитывая, что в формуле 8б Д2К отсутствует аргумент, то данный способ адаптивной дискретизации можно применить и к невременным функциям. В этом случае дополнительно вводят измеритель аргумента и кван- 60 тующее устройство для аргумента. Алгоритм способа сохраняется прежним, но теперь команды, получаемые в результате сравнения второй конечной разности, высчитанной по отсчетам значений- функции, и 86g подаются на 65 5 10 15 20 25 45 55 квантующее устройство аргумента для увеличения величины кванта при величине второй .конечной разности, меньщей чем 86g, и уменьшения величины кванта при величине второй конечной разности, большей чем 86g-. Для дальнейшего сокращения объема иЗбыточности измерительной информации регистрируются только те измерения (отсчеты), для которых вторая конечная разность больше или равна 86g, что достигается .подачей сигнала со схемы сравнения на управляемые кодовые ключи, пропускающие в этих случаях информацию на выход. Это применимо как для временных, так и для невременных фунКций. Датчик / значений функции представляет собой первичный преобразователь, преобразующий значения величин измеряемой функции в напряжение. Это напряжение поступает на преобразователь 2 напряжение - цифровой код, работающий циклически при подаче на его вход (клемму «Внешний запуск) тактовых импульсов от генератора 3 тактовых импульсов с управляемой частотой. Цифровой код с преобразователя 2 напряжение - цифровой код подается на выход устройства в качестве текущего отсчета величины измеряемой функции, одновременно он нодается в блок 7 вычисления первой конечной разности по величине функции, откуда - в блок 8 определения второй конечной разности по величине функции. Схемы и конструкции этих блоiKOB одинаковы, каждый из них состоит из накопительного сумматора, регистра и кодовых ключей. Работой блоков 7 и 5 управляет схема 6, которая представляет собой распределитель импульсов (набор схем задержки). Схема 6, получив тактовый импульс от генератора 3 тактовых импульсов с управляемой частотой, управляет последовательно во времени работой элементов блоков 7 и 5. Цифровой КОД, получаемый на выходе блока 8, поступает на кодовую схему 9 сравнения (цифровой нуль-орган), туда же подается код с регистра 10, в котором хранится цифровая ошибка, равная восьми допустимым погрешностям линейной интерполяции (86g). Кодовая схема 9 сравнения осуществляет сравнение подаваемых на нее цифровых кодов, выявляет знак разности и в соответствии со знаком разности подает команду на генератор 3 тактовых импульсов с управляемой частотой, которая и используется в последнем для управления частотой. Если знак разности 86g.-ДзУ отрицательный, то частота генератора увеличивается, если же положительный- частота генератора уменьшается. Для того чтобы на выходе устройства иметь для каждого текущего отсчета значений величины функции соответствующий отсчет времени, в устройстве предусмотрен цифровой датчик 4 времени, который представляет собой генератор стабильной частоты и счетчик числа импульсов, и кодовый ключ 5. Тактовые импульсы с генератора 3 тактовых импульсов с управляемой частотой подаются на кодовый ключ 5, замыкание которого обеспечивает прохол :дение текущего отсчета времени в цифровой форме на выход устройства. TaiKHM 0:бразом, на выходе устройства появляются отсчеты текущих значений величины функции и соответствующих моментов времени с частотой, определяемой величиной второй конечной разности по величине значений измеряемой функции. Для дальнейшего сокращения объема избыточности измерительной информации на выход устройства для регистрации поступают только те отсчеты, для которых вторая конечная разность больше или равна 86g. Это достигается подачей сигнала с кодовой схемы сравнения (цифрового нуль-органа) 9 на кодовь1е ключи // и 12, при отрицательном сигнале ключи 11 и 12 закрыты, а при положительном и нуле - открываются. П|редмет изобретения Устройство для адаптивной дискретизации при измерении функционально зависимых величин, содержащее датчик значений измеряемой функции, преобразователь напряжениекод, решающий блок, схему управления, схему сравнения, отличающееся тем, что, с целью увеличения его быстродействия, оно содержит в решающем блоке бло-к вычисления первой конечной разности и блок вычисления второй конечной разности, соединенные последовательно и подключенные к блоку управления, вход первого блока подсоединен к выходу преобразователя напряжение - код, а выход второго блока подключен к первому входу схемы сравнения, второй вход которой соединен с выходами .регистра хранения допустимой ошибки, а ее выход - ко входу управляемого генератора тактовых импульсов, выход которого также соединен с блоком управления, выход схемы оравнения также подключен к первым входам первого и второго ключей, вторые входы которых подсоединены соответственно с выходом преобразователя и выходом третьего ключа, первый вход которого соединен с выходом преобразователя напряжение код, а второй - с выходом датчика времени.
| название | год | авторы | номер документа |
|---|---|---|---|
| Анализатор спектра | 1978 |
|
SU840762A1 |
| Цифровой генератор спектра фурье | 1973 |
|
SU446063A1 |
| Способ адаптивной временной дискретизации и устройство для его осуществления | 1983 |
|
SU1095390A1 |
| АНАЛОГО-ЦИФРОВОЙ ПРЕОБРАЗОВАТЕЛЬ | 1973 |
|
SU370719A1 |
| УСТРОЙСТВО для ДИСКРЕТНОГО ПРЕДСТАВЛЕНИЯ ДВУХ ФУНКЦИОНАЛЬНО СВЯЗАННЫХ ПАРАМЕТРОВ | 1970 |
|
SU268042A1 |
| Устройство для сжатия информации | 1982 |
|
SU1056251A1 |
| КОРРЕЛЯЦИОННАЯ ИЗМЕРИТЕЛЬНАЯ СИСТЕМА | 1991 |
|
RU2007753C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АМПЛИТУДЫ ИМПУЛЬСОВ И ИЗМЕРИТЕЛЬ ЕГО РЕАЛИЗУЮЩИЙ (ВАРИАНТЫ) | 2021 |
|
RU2773621C1 |
| Адаптивный коррелометр | 1979 |
|
SU809196A1 |
| Устройство для вычисления коэффициентов Фурье | 1985 |
|
SU1278886A1 |
