Известны системы для изготовления рельефных моделей, которые состоят из сложных запоминающих, счетно-решающих устройств и вертикально-фрезерных станков с программным управлением. Эти системы работают с использованием сигналов из запоминающих устройств, которые хранят информацию, полученную в результате предварительного программирования на специальных сканирующих .устройствах. Однако известные системы снабжены громоздким и сложным оборудованием сканирования карт, запоминания и хранения информации, а также требуют -много времени при предварительном программировании.
Цель изобретения заключается в полном устранении предварительного программирования, в максимально возможном упрощении работы и в значительном упрощении потребного оборудования.
Это приведет к снижению стоимости работ, к повышению надежности функционирования системы и позволит использовать оператора невысокой квалификации. В данной системе устройство съема информации с карты сопряжено с суппортом вертикально-фрезерного станка. Съем информации производится одновременно с вырезанием рельефной модели.
то-текущую строку развертки, но которой от другого источника света передгещают цветное, например красное, световое пятно-марку. Движение последней связано с движением инструмента в горизонтальной плоскости относительно заготовки. Для ограничения расстояния менчду горизонталями по текущей строке развертки устанавливают две подвижные в плоскости карты линейки с реостатом на их
0 концах. В момент совмещения красной марки с одной из линеек запускают преобразователь величины сопротивлений реостата в напряжение, управляющее скоростью вертикального перемещения инструмента относительно
5 заготовки.
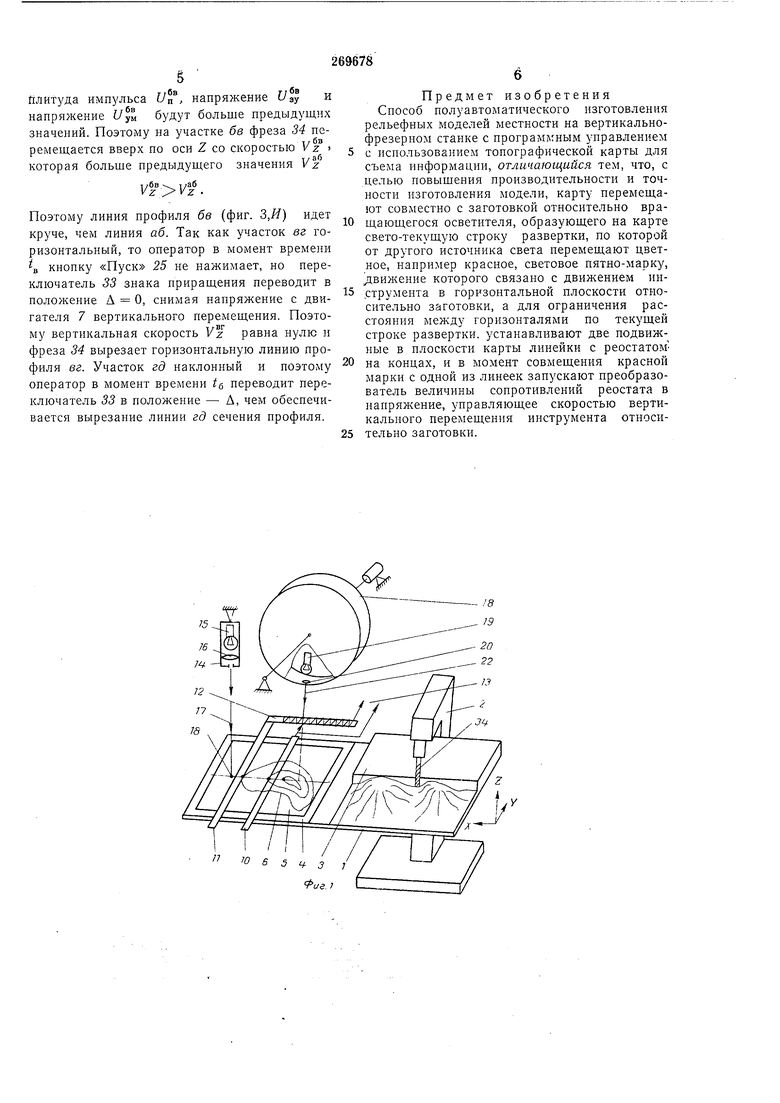
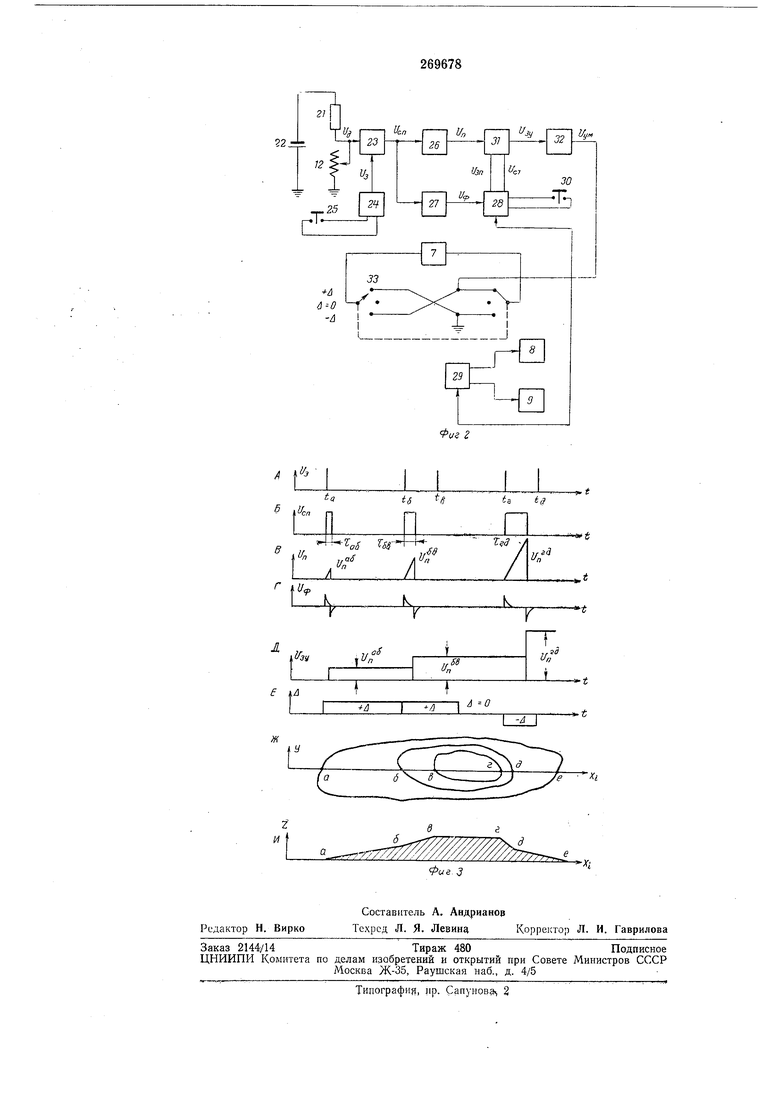
На фиг. 1 изображена функциональная схема лгеханической части системы; на фиг. 2 - функциональная схема электронного устройства унравления; на фиг. 3 - диаграмма сигналов и перемещений.
На схнпорте / вертикально-фрезерного станка 2 установлена заготовка 3 для рельефной мофели и основание 4 с наложенной на него топографической картой 5, на которой нанесепы горизонтали 6. Под действием двигателей 7-9 фрезерного станка суппорт может перемещаться вдоль осей X, У и Z. Над картой 5 вдоль оси А возмол но перемещение подвижных измерительных линеек /( и //, выполненустановлен реостат 12, сопротивление между выводами 13 которого обратно пропорционально расстоянию L между линейками R - .
Над картой 5 неподвижно укреплен держатель 14 лампочки 15 накаливания, перед которой установлен красный светофильтр 16. Луч света создает на карте красное пятно-марку 17. Над картой укреплен вращающийся пустотелый цилиндр 18, в котором установлена лампочка 19 накаливания белого света, которая через отверстие 20 посылает луч. Реостат 12 вместе с резистором 21 образует делитель 22 напряжения источника постоянного тока, который соединен с потенциальным входом спусковой схемы 23. Генератор 24 одиночных импульсов, запускаемый от кнопки «Пуск 25, соединен с импульсным входом спусковой vxeмы 23, выход которой соединен со входом ждущего генератора 26 пилообразного напряжения и со входом дифференцируемой цепи 27. Последняя соединена со входом устройства 28 управления, которое соединено с программным устройством 29 управления, с кнопкой «Останов 50 и с запоминающим устройством 31, соединенным с генератором 26 пилообразного напряжения и служащим для запоминания амплитуды его импульсов.
Вход усилителя 32 мощности соединен с выходом запоминающего устройства 31, а выход - с переключателем 33 знака приращения, через который управляющее напряжение поступает на двигатель 7 вертикального перемещения фрезы 34. Программное устройство 29 управляет двигателями горизонтального перемещения. Двигатель 8 перемещается по оси X, а двигатель 9 - по оси У.
Программное устройство 29 управляет двигателем 8, который перемещает суппорт 1 станка по оси X до тех пор, пока красная марка 17 не достигнет одного края карты 5. После этого двигатель 9 перемещает суппорт на небольщую величину Ау (шаг) по оси У. Затем суппорт перемещается в обратную сторону по оси X до тех пор, пока марка не достигнет другого края карты. Так осуществляется построчная развертка всей карты.
Луч белого света из вращающегося цилиндра /S прочерчивает белую линию света на карте 5. Эта линия совпадает с траекторией движения красной марки при движении суп.порта вдоль оси X и является текущей строкой .развертки.
Съем информации с карты 5 производится оператором следующим образом.
Пусть в данный момент суппорт перемещается влево по оси X. Красная марка 17 движется относительно карты 5 вправо по строке развертки. Оператор устанавливает подвижные измерительные линейки 10 и Л так, чтобы они своими внутренними краями касались точек пересечения строки развертки с двумя соседними горизонталями, линию склона которыми необходимо воспроизвести на рельефной модели.
Пусть этими точками будут точки а и б. На фиг. 3, ж изображен фрагмент рельефа местности в виде трех горизонталей. Тогда измерительная линейка 11 каснется точки а, а измерительная линейка 10 - точки б. В тот момент, когда красная марка достигнет точки а, оператор кнопкой «Нуск 25 запускает генератор 24 одиночных имнульсов, который импульсом Us в момент времени t (фиг. 3, Л)
запускает спусковую схему 23, генерирующую прямоугольный импульс f/СП (фиг. 3,5), длительность, которого т прямо пропорциональна потенциалу U делителя напряжения и прямо пропорциональна величине сопротивления реостата.
Импульс f/cn запускает ждущий генератор
26пилообразного напряжения, вырабатывающий импульс УП (фиг. 3,В), амплитуда которого прямо пропорциональна Таб С цепи
27импульс f/ф (фиг. 3,Г), соответствующий заднему фронту импульса t/cn , запускает устройство 28 управления, которое импульсом УСТ очищает запоминающее устройство 31,
а импульсом f/зп включает его в режим запоминания амплитуды пилообразного импульса и° . В результате этого на выходе запоминающего устройства появляется постоянное напряжение (фиг. 3,Д), которое поступает на усилитель 32 мощности, напряжение f/ум на выходе которого тоже будет обратно пропорционально расстоянию L,
//аб г/аб -ум - -п
ia6
Так как точка б на местности лежит выше точки а, то оператор одновременно с нажатием кнопки «Пуск 25 устанавливает переключатель 33 знака приращения в положение -f А, в результате чего на двигатель вертикального перемещения фрезы 34 поступает напряжение t/ум , которое обеспечивает вертикальное перемещение фрезы 34 относительно рельефной модели с вертикальной скоростью
1/1 . А так как заготовка для рельефной модели 3 перемещается относительно фрезы 34 по оси X с постоянной скоростью Vz, то фреза вырезает наклонную линию аб (фиг. 3,Я) сечения профиля. Пока система отрабатывает
вырезание линии аб сечения профиля, оператор перемещает измерительную линейку // в точку б, а измерительную линейку 10 - & точку в и ждет, пока красная марка 17 достигнет точки б. В этот момент t (фиг. 3,Л) он
вновь запускает систему кнопкой «Пуск 25. Новому расстоянию Lf, соответствует значение сопротивления реостата 12, причем величина бв больще предыдущего значения
аб
так как
бв
йлитуда импульса t/n°. напряжение t/ay и
гбв
напряжение t/ум будут больше предыдущих значений. Поэтому на участке бв фреза 34 пебв
ZT 7 иИ со скоростью Vz
аб
которая больше предыдуш;его значения Vz
т/бв т/аб Vz . KZ
Поэтому ЛИНИЯ профиля бв (фиг. 3,Я) идет круче, чем линия аб. Так как участок вг горизонтальный, то оператор в момент времени в кнопку «Пуск 25 не нажимает, но переключатель 3 знака прираш,ения переводит в положение А О, снимая напряжение с двигателя 7 вертикального перемеш,ения. Поэтот г ВГ
му вертикальная скорость Vz равна нулю и фреза 34 вырезает горизонтальную линию профиля вг. Участок гд наклонный и поэтому оператор в момент времени tg переводит переключатель 55 в положение - А, чем обеспечивается вырезание линии гд сечения профиля.
Предмет изобретения Способ полуавтоматического изготовления рельефных моделей местности на вертикальнофрезерном станке с программным управлением с использованием топографической карты для съема информации, отличающийся тем, что, с целью повышения производительности и точности изготовления модели, карту перемещают совместно с заготовкой относительно вращающегося осветителя, образующего на карте свето-текущую строку развертки, по которой от другого источника света перемещают цветное, например красное, световое пятно-марку, движение которого связано с движением инструмента в горизонтальной плоскости относительно заготовки, а для ограничения расстояния между горизонталями по текущей строке развертки, устанавливают две подвижные в плоскости карты линейки с реостатомна концах, и в момент совмещения красной марки с одной из линеек запускают преобразователь величины сопротивлений реостата в нанряжение, управляющее скоростью вертикального перемещения инструмента относительно заготовки.
5
ta
Г г/
й«
t
is S
ta ig
