Подъемные и др. машины, имеющие влектрическйй привод, обычно снабжаются автоматическим управлением, регулирующим скорость движения, в зависимости от пройденного пути, времени иди того и другого одновременно. В зависимости от рода применяемого приводного двигатедя на скорость двил4ения влияют величина нагрузки, трение, омическое сопротивление и т. д., т.-е. факторы, меняющиеся при ходе с изменяющейся скоростью. Эти изменения могут вызвать такие отклонения от желаемого режима, при которых невозможна надежная нормальная работа механизма.
Предлагаемое изобретение йредставляет собой автоматическое регулирующее устройство для привода по система ВардЛеонарда подъемных и других машин, движущихся с закономерно и периодически изменяющейся скоростью, и имеет целью давать двигателю подъемной или другой машины определенные скорости как функции пройденного клетью или другого пути, независимо от изменения нагрузки, трения и т. д. Для этого в названном устройстве применены: 1) кулачковый механизм, приводимый в действие от вала главного двигателя и управляющий контактным рычагом реостата, предназначенного регулировать напряжение главного генератора, а тем самым и изменять скорость главного двигателя, соответственно пройденному машиной пути и 2) быстродействующий регулятор, находящийся под действием вспомогательного генератора, приводимого во вращение от вала .главного двигателя, и служащий для выравнивания несовпадения действительной скорости главного двигателя со скоростью, требующейся по графику скорости.
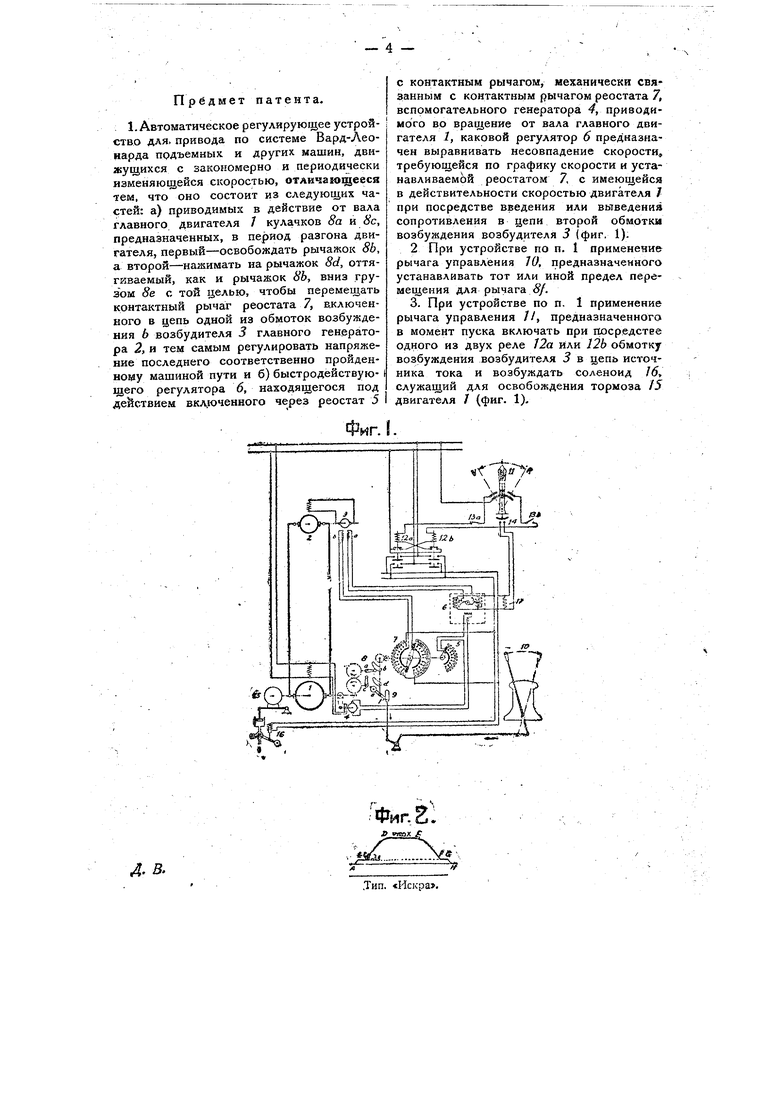
На чертеже фиг. 1 изображает схему электрической цепи устройства; фиг. 2 - примерную диаграмму изменения скорости двигателя в зависимости от пройденного машиной пути.
Автоматическое регулирующее устройство для привода по системе Вард-Леонарда подъемных и других машин заключается в следующем. Обмотка возбуждения главного генератора 2, питающегоглавный двигатель 1, получает ток от возбудителя 3, снабженного двумя обмотками возбуждений с и 6. В обмотку возбуждения а включен быстродействующий регулятор б, а в обмотку возбуждения Ь- реостат 7. В момент пуска регулятор 6 устанавливает возбуждение, соответствующее нагрузке двигателя /, а реостат 7 служит для изменения скорости этого двигателя. Этот реостат 7 управляется от главного двигателя / при помощи механизма 8, через посредство кулачков а и с и рычажков bud, находящихся под действием груза е. С контактным рычагом реостата 7 механически связан кон,тактный рычаг реостата 5, введенного в обмотку быстродействующего регулятора 6, питаемую вспомогательным генератором--#, приводимым во вращение от вала двигателя /. Этот реостат 5 предназначен для поддержания в обмотке регулятора б тока постоянным при увеличении числа оборотов главного двигателя /, благодаря чему в обмотке а возбуждения возбудителя 3 ток не меняется. Обмотка возбуждения возбудителя 3 включается в цепь источника тока через посредство одного из двух реле /2а или /26, включаемых в момент пуска рычагом управления //. Этот последний одновременно включает в цепь тока и соленоид 6, служащий для освобождения тормоза /5 двигателя /.
Реостат 7 управляется от вала двигателя / при помощи механизма 8, в котором груз 8е стремится привести контактный рычаг реостата 7 в нулевое положение, соответстаующее полному напряжению, удерживает криволинейнь е рычажки механизма S во время пуска в ход и замедления движения в нужном соприкосновении друг с другом. Как только главный двигатель / приходит во вращение, кулачок 8а начинает поворачиваться -в направлении часовой стрелки, и контахстнык рычаг реостата 7 под действием груза 8е будет перемешаться в направлении пуска. В конца первой половины пути, напр, подъема клети, рычаг 8с воздействует на рычаг 8d так, что контактный рычаг реостата 7 возвращается в первоначальное положение перед пуском.
Быстродействующий регулятор 6 имеет статическую вращательную систему. Момент вращения пружины и момент вращения этой системы при нормальном напряжении удерживаются при каждом положе НИИ обмотки регулятора в состоянии равновесия. Когда контактный рычаг реостата 5, механически связанный с KOI тактньш рычагом реостата 7, поворачивается в направлении пуска, то сопротивление в цепи реостата 5 увеличивается таким образом, что, несмотря на повышающееся с увеличением числа оборотов напряжение вспомогательного генератора , обмотка быстродействующего регулятора 6 получает постоянное напряжение, вследствие чего катушка его остается в неизменном положении, если имеющаяся в действительности скорость двигателя / совпадает со скоростью, требующейся по графику скорости и установленной реостатом 7. При отклонении же напряжения в сторону повышения или уменьшения от нормального, катушка регулятора б поворачивается в ту или другую сторону и тем самым изменяет сопротивление в цепи обмотки а возбудителя .5, вследстве чего изменяется и напряжение на зажимах последнего, а, следовательно, и число оборотов двигателя 7 до тех пор, пока действительная скорость его не установится равной требующейся по графику скорости. Весь процесс регулирования скорости, изменяющейся, например, по диаграмме скоростей, изображенный на фиг. 2, происходит следующим образом. В конце последнего подъема, при котором рычаг управления // стоял в положении R, кабинкой открывается коицевой выключатель J3b и машина останавливается. Для нового подъема рычаг // приводится в положение У, при котором замыкается реле /2а. Так как регулятор б еще не находится под напряжением, тб он и стоит в указанном на чертеже полоагении и по обмотке а возбудителя 3 течет максимальный ток, в обмотке же Ь тока еще нет, так как она включается лишь в точке С на диаграмме пути и скорости (фиг. 2J. .Генератор 2, возбуждаясь, будет питать главный, двигатель /, который разовьет вращающий момент, несколько | превосходящий момент, создаваемый нагрузкой, и подъемная машина начнет двигаться в соответствующем направлении. Тормоз /5 освобождает вал двигателя / при прохождении тока по обмотке соленоида /б, включаемой одаезременно. с обмоткой с возбудителя 3. Скорость двигателя / возрастает до величины FI, при которой вспомогательный генератор 4 создает напряжение, при котором вращающий момент обмотки регулятора 6 уравновешивается натяжением пружины, и поэтому скорость Kj машины остается постоянной. С этой скоростью FI двигатель / работает до точки С диаграммы, так как устройство механизма 8 рассчитано таким образом, что до этого момента реостаты 7 и 5 остаются в неизменном положении. В точке С начинается выключение сопротивления в реостате 7, вследствие чего по обмотке Ь возбудителя 3 пойдет постоянно увеличивающийся ток, а потому число оборотов двигателя / будет также увеличиваться. Одновременно с этим перемещением контактного рычага реостата 7 будет перемещаться и связанный с ним контактный рычаг реостата 5, вследствие чего будет увеличиваться сопротивление его цепи, с целью компенсировать получающееся вследствие увеличения скорости двигателя / напряжение вспомогательного генератора 4. В результате изложенного регулятор обеспечивает соответствие „наличной и .требующейся скорости в период разгона.
Когда реостат 7 придет в крайнее по. ложение, двигатель / приобретает максимальную скорость Vmax, постоянство которой на определенном участке пути обеспечивается регулятором 6, устанавливающим соответствующее возбуждение обмотки а возбудителя 5. В точке , диаграммы скорости начинается понижение скорости двигателя /, достигаемое тем, что кулачок 8с нажимает на рычажок 8d, в результате чего рукоятка реостата 7 передвигается в направлении увеличения сопротивления (т.-е. в обратном направлении). В точке/ диаграммы реостат 7 будет находиться в том же положении, как и в точке С, при котором двигатель 7 имел скорость KI, с которой он и пойдет до точки G, в которой включается концевой рычаг 13а. Обмотка с выключается, а вместе с ней вьжлючается и обмотка соленоида 16, начнет действовать воздушный тормоз 15) останавливающий машину в точке Н.
С целью обеспечения возможности устанавливать тот или иной предел максимальной скорости подъема по желанию
применен- рычаг управления 10, снабженный прорезом, в котором перемещается палец рычага 5/, упирающт йзя в верхний край прореза 9, когда контактный рычаг реостата 7 придет в положение, устанавливающее желаемую скорость подъема.
Управление рычагом 11 может производиться или непосредственно на месте, или же из какого-либо удаленного пункта. В обоих случаях воздействующий импульс может исходить от машиниста,, часового, механизма или от самого мотора /, при чем, например, при действии концевого выключателя 13 может автоматически происходить переключение рычага 11 на. следующий подъем.
Придавая соответствующую форму рычагам и кулачкам 8a-8d можно придать любую форму кривой, соответствующей периоду разгона и замед.ения.
Приведенные выше пояснения относятся к чисто автоматическому управлению. Вместе с таким управлением возможно и управление машиной от рукя, если известные подъемы нужно совершать по диаграмме, отклоняющейся от нормальной. Для таких случаев имеется ручное тормозное управление, как у обычных подъемных ыашип.
При ручном управлении рычаг 10 до начала подъема находится в положекки, показанном пунктиром. После того как рычаг 77 будет повернут в требуемом направлении, можно nepeMeiijaTb рычаг (не показанный ка чертелге) ручного тормоза; освобождая последний, после чего мотор 7 приходит во вращение. Постепенным передвиганьем рычага 10 вперед производится увеличение скорости. До начала автоматического замедления при помощи механизма 8 можно в любой момент при помощи обратного перемещения рычага /О произвести понижение скоростиЕсли в отдельном случае при начале подъема необходимый вращаюгдий момент нагрузки окажется больше нормального, так что начального момента мотора / недостаточно для того, чтобы пустить машину в ход в требуемом направлении, то, замыкая накоротко сопротивление 17 при помощи рубильника 14, можно усилить ток возбуждения За, в результате чего двигатель / разовьет больший вращающий момент, чем нормальный.