1
Известны устройства для автоматической присучки пряжи на прядильной машине, содержащие пряжеулавливающий элемент с клиновидной щелью, механизм изменения сечения клиновидной щели и присучающий ролик, смоптированные на рычагах исполнительного механнзма с пневмоцилиндром и приводимые им в движение по сигналу пневматического датчика, срабатывающего при обрыве пряжи.
Описываемое устройство надежнее в работе и проще в обслуживании. Это достигается тем, что оно снабжено пнбвматическим и приспособлениями для приема сигналов пневматических датчиков одного или нескольких устройств и передачи этих сигналов на исполнительные механизмы и механизм изменения сечения клиновидной щели пряжеулавливающего элемента при обрыве пряжи, а также передачи сигналов С поста управления машиной при наработке съема для отвода устройства из рабочей зоны машины.
Пневматическое приспособление для приема и передачи сигналов смонтировано на корпусе пневмоцилиндра исполнительного механизма. Поворотный рычаг, несущий присучающий ролик и пряжеулавливающий элемент, выполнен подпружиненным для возврата его в исходное положение после присучки пряжи, а один конец гибкого элемента, служащего для перемещения поворотного рычага, закреплен на
щтоке пневмоцилипдра исполнительного механизма. В устройстве использован пневматический датчик обрыва пряжи типа сопло-заслонка.
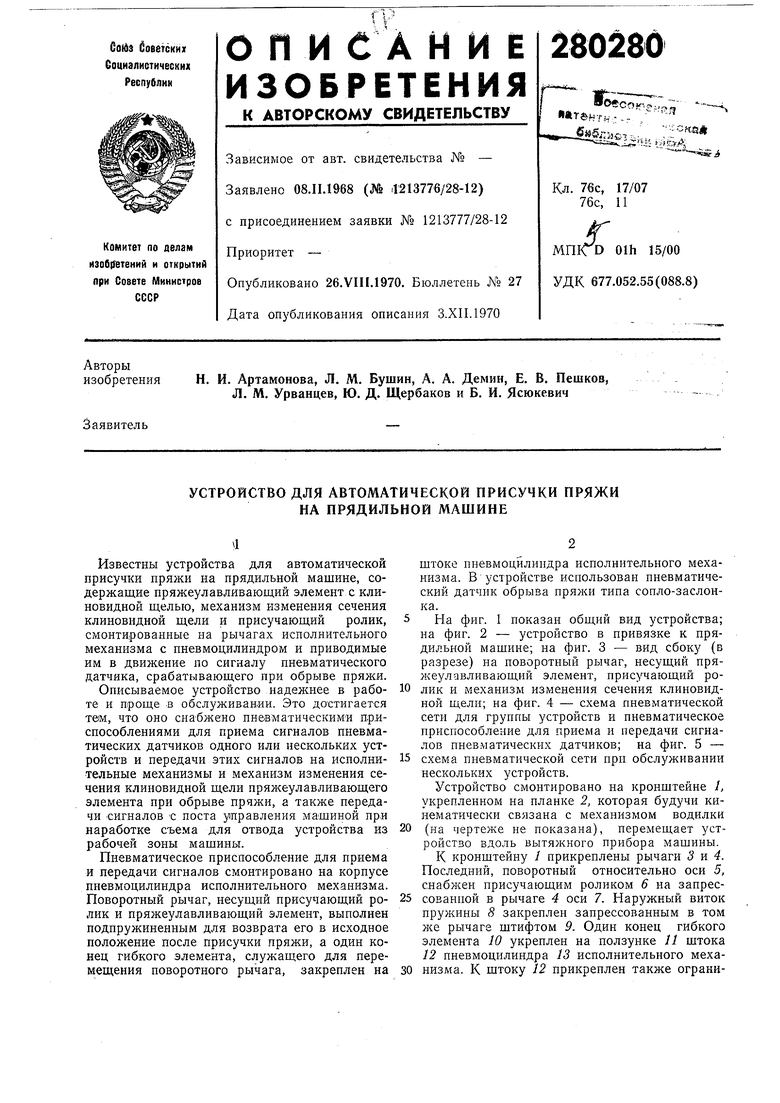
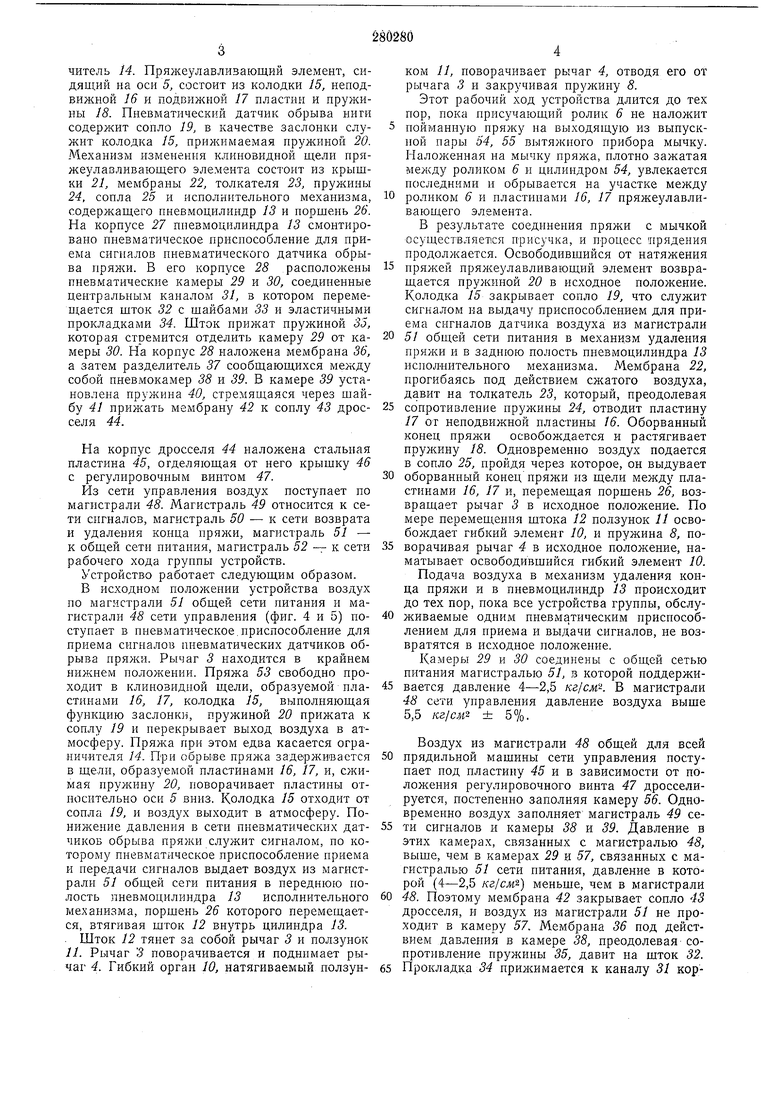
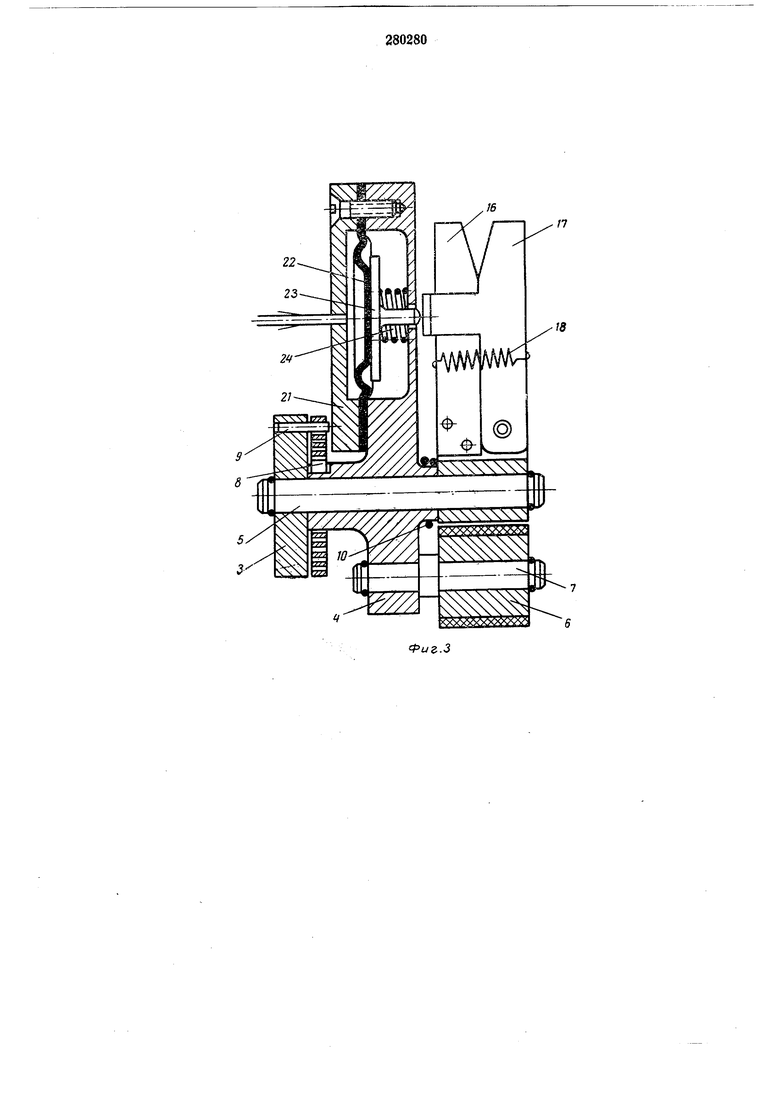
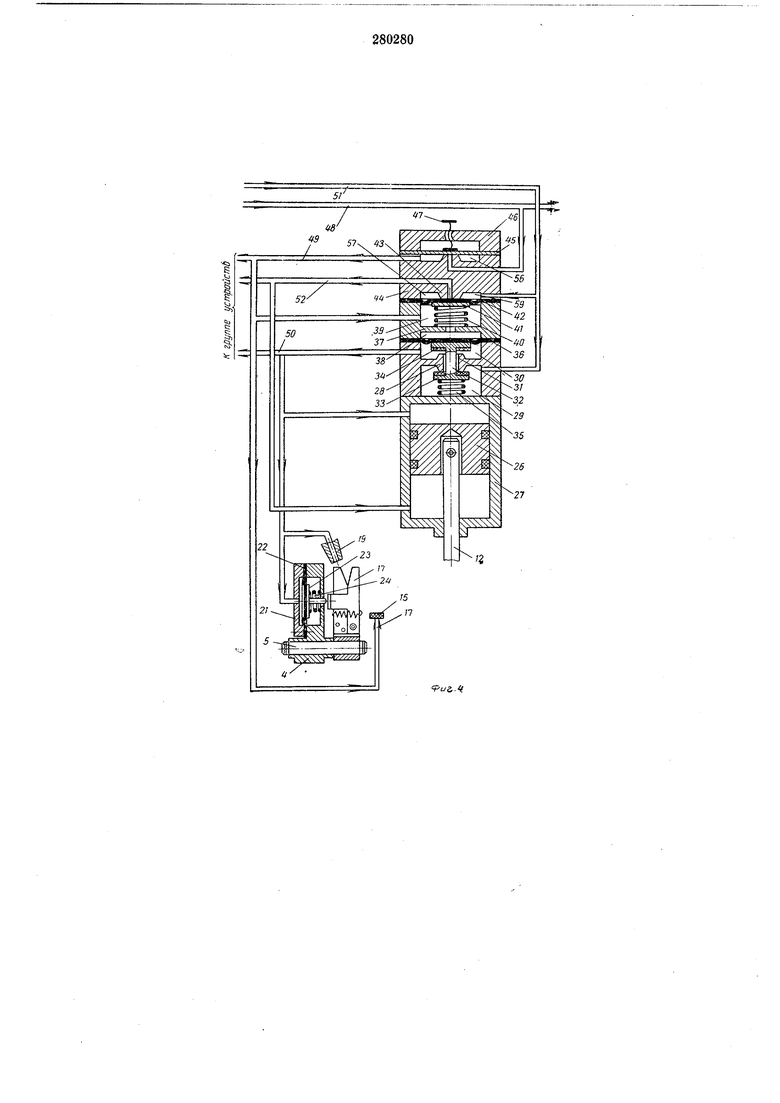
На фиг. 1 показан общий вид устройства; на фиг. 2 - устройство в привязке к прядильной машине; на фиг. 3 - вид сбоку (в разрезе) на поворотный рычаг, несущий пряжеулавливающий элемент, присучающий ролик и механизм изменения сечения клиновидной щели; на фиг. 4 - схема пневматической сети для группы устройств и пневматическое приспособление для приема и передачи сигналов пневматических датчиков; на фиг. 5 -
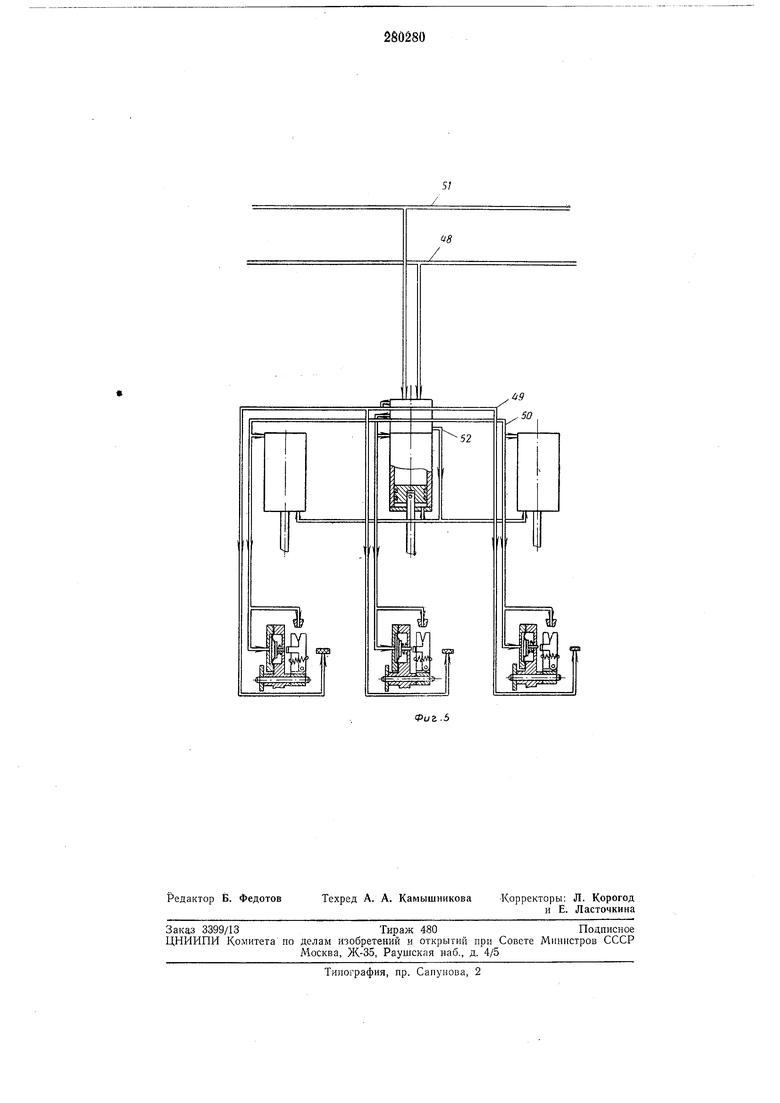
схема пневматической сети при обслуживании нескольких устройств.
Устройство смонтировано на кронщтейне /, укрепленном на планке 2, которая будучи кинематически связана с механизмом водилки
(на чертеже не показана), перемещает устройство вдоль вытяжного прибора машины. К кронщтейну / прикреплены рычаги 3 и 4. Последний, поворотный относительно оси 5, снаблсен присучающим роликом 6 на запрессованпой в рычаге 4 оси 7. Наружный виток пружины 8 закреплен запрессованным в том же рычаге щтифтом 9. Один конец гибкого элемента 10 укреплен на ползунке 11 щтока 12 пневмоцилиндра 13 исполнительного мехачитель 14. Пряжеулавлизающий элемент, сидящий на оси 5, состоит из колодки 15, неподвижной 16 и подвижной 17 пластин и пружины 18. Пневматический датчик обрыва ниги содержит сопло 19, в качестве заслонкн служит колодка 15, прижимаемая пружиной 20. Механизм изменения клиновидной ш,ели пряжеулазливающего элемента состоит из крышки 21, мембраны 22, толкателя 23, пружины 24, сопла 25 и исполнительного механизма, содержащего нневмоцилиндр 13 и норшень 26. На корпусе 27 пневмоцилиндра 13 смонтировано пневматическое приспособление для приема сигналов пневматического датчика обрыва пряж;и. В его корпусе 28 расположены пневматические камеры 29 и 30, соединенные центральным каналом 31, в котором перемещается шток 32 с шайбами 33 и эластичными прокладками 34. Шток прижат пружиной 35, которая стремится отделить камеру 29 от камеры 30. На корпус 28 наложена мембрана 36, а затем разделитель 37 сообщающихся между собой пневмокамер 38 и 39. В камере 39 установлена пружина 40, стремящаяся через шайбу 41 прижать мембрану 42 к сонлу 43 дросселя 44.
На корпус дросселя 44 наложена стальная пластина 45, отделяющая от него крышку 46 с регулировочным винтом 47.
Из сети управления воздух поступает но магистрали 48. Магистраль 49 относится к сети сигналов, магистраль 50 - к сети возврата и удаления конца нряжи, магистраль 51 - к общей сети питания, магистраль 52 - к сети рабочего хода группы устройств.
Устройство работает следующим образом.
В исходном положении устройства воздух по магистрали 51 общей сети питания и магистрали 48 сети унравления (фиг. 4 и 5) поступает в пневматическое.нриспособление для приема сигналов пневматических датчиков обрыва пряжи. Рычаг 3 находится в крайнем нижнем ноложении. Пряжа 53 свободно проходит в клиновидной щели, образуемой пластинами 16, 17, колодка 15, вынолняющая функцию заслонки, пружиной 20 прижата к соплу 19 и перекрывает выход воздуха в атмосферу. Пряжа при этом едва касается ограничителя 14. При обрыве пряжа задерживается в щели, образуемой пластинами 16, 17, и, сжимая пружину 20, поворачивает пластины относительно оси 5 вниз. Колодка 15 отходит от сопла 19, н воздух выходит в атмосферу. Понижение давления в сети пневматических датчиков обрыва пряжи служит сигналом, по которому пневматическое приспособление приема и нередачи сигналов выдает воздух из магистрали 51 общей сети питания в переднюю полость пневмоцилиндра 13 иснолнительного механизма, поршень 26 которого перемещается, втягивая щток 12 внутрь цилиндра 13. . Шток 12 тянет за собой рычаг 3 н ползунок 11. Рычаг 3 поворачивается и подннмает рычаг 4. Гибкий орган 10, натягиваемый ползунком 11, поворачивает рычаг 4, отводя его от рычага 3 и закручивая пружину 8.
Этот рабочий ход устройства длится до тех пор, пока нрисучающий ролик 6 не наложит пойманную нряжу на выходящую из выпускной пары 54, 55 вытяжного прибора мычку. Наложенная на мычку пряжа, плотно зажатая между роликом 6 н цилиндром 54, увлекается носледними и обрывается на участке между
роликом 6 и нластииамн 16, 17 пряжеулавливающего элемента.
В результате соединения пряжи с мычкой осуществляется присучка, и процесс прядения продолжается. Освободившийся от натяжения
пряжей пряжеулавлнвающий элемент возвращается пружиной 20 в исходное положение. Колодка 15 закрывает сопло 19, что служит сигналом на выдачу приспособлением для приема сигналов датчика воздуха из магистрали
51 общей сети питания в механизм удаления нряжи н в заднюю полость пневмоцилиндра 13 исполнительного механизма. Мембрана 22, нрогибаясь под действием сжатого воздуха, давит на толкатель 23, который, преодолевая
сопротивление пружины 24, отводит пластину 17 от ненодвижной нластины 16. Оборванный конец пряжи освобождается и растягивает пружину /5. Одновременно воздух подается в сопло 25, пройдя через которое, он выдувает
оборванный конец нряжи из щели иластинами 16, 17 и, перемещая поршень 26, возвращает рычаг 5 в исходное положение. По мере перемещения щтока 12 ползунок 11 освобождает гибкий элемент 10, н пружина 8, поворачивая рычаг 4 в исходное положение, наматывает освободившийся гибкий элемент 10. Подача воздуха в механизм удаления конца пряжи и в пневмоцилиндр 13 происходит до тех пор, пока все устройства группы, обслуживаемые одним пневматическим приснособлением для нриема и выдачи сигналов, не возвратятся в исходное положение.
Камеры 29 и 30 соединены с общей сетью питания магистралью 51, з которой поддерживается давление 4-2,5 кг/см-. В магистрали 48 сети унравлення давление воздуха выше 5,5 кг/си ±5%.
Воздух из магистрали 48 общей для всей
прядильной машины сети управления поступает под пластину 45 и в зависимости от положения регулировочного винта 47 дросселируется, постепенно заполняя камеру 56. Одновременно воздух заполняет магистраль 49 сети сигналов и камеры 38 и 39. Давление в этих камерах, связанных с магистралью 48, выше, чем в камерах 29 и 57, связанных с магистралью 51 сети питания, давление в которой (4-2,5 кг/см) меньше, чем в магистрали
48. Поэтому мембрана 42 закрывает сопло 43 дросселя, н воздух из магистрали 51 не нроходит в камеру 57. Мембрана 36 под действием давления в камере 38, преодолевая сопротивление пружины 35, давит на шток 32.
пуса 28, в результате чего воздух из магистрали 51 сети питания в камеру 38 не поступает.
При обрыве пряжи воздух из камеры 56 и магистрали 49 сети сигналов стравливается в атмосферу. По мере этого давление в камерах 38 и 39 понижается, и шток 32 под действием усилия пружины, 35 и давления в камере 29 отходит, открывая воздуху доступ из камеры 29 в камеру 30.
Повышение давления в последней приводит к ускоренному перемешению штока 32 и закрытию капала корпуса 2S прокладкой 34. Так , как время перемеш,ения штока из одного крайнего положения в другое очень невелико, то в магистрали 50 сети возврата и удаления конца пряжи давление возрастает очень незначительно, толкатель 23 не-может преодолеть сопротивления пружины 24, и пластины 16, 17 пряжеулавлпваюшего элемента не расходятся.
При дальнейшем понижении давления в камере 39 давление воздуха в камере 57 сжимает пружину 40 и, преодолевая давление в камере 39, заставляет мембрану 42 отойти от сопла 43 дросселя. Воздух из камеры 57 поступает в магистраль 52 сети рабочего хода, а по ней - в нередние полости пневмоцилиндров 13 исполнительных механизмов всей группы устройств.
После рабочего хода, прнсучкп нряжн и обрыва ее в пластинах 16 и 17 пряжеулавливаюшего элемента последнпй, освободившись от натяжения, закрывает колодкой 15 сопло 19, и в камерах 38 и 39 начинает постененно возрастать давление. Незначительно возросшее давление в камере 39, складываясь с усилием пружины 40, преодолевает усилие давления в камере 57. Мембрана 42, закрыв сопло 43 дросселя, прекрашает поступление воздуха из магистрали 51 сети питания в магистраль 52 рабочего хода.
При дальнейшем повышении давления в камерах 38 и 39 усилие на мембрану 36 со стороны камеры 3S становится больше, чем усилие со стороны камеры 30, суммированное с усилием пружины 35. Поэтому шток 32 начинает перемещаться, и прокладка 34 открывает канал 31 корпуса 28. Воздух из камеры 29 начинает ноступать в камеру 30, а оттуда - в магистраль 50 сети возврата и удаления конца пряжи. Выдача воздуха в эту сеть происходит до тех нор, нока, по мере повышения давления в камерах 38 и 39, мембрана 36 не переместит шток 32 в крайнее положение и прокладка 34 не закроет канал 31 корпуса 28. Время наполнения камер 38 и 39 зависит от степени дросселирования и легко регулируется винтом 47. Воздух из магистрали 50 сети возврата и удаления конца нряжи одновременно поступает в заднюю камеру пневмоцилиндра, поршень 26 перемешается к передней крышке цилиндра, и устройство возвращается в исходное положение. Одновременно по той же магистрали воздух попадает в механизм изменения клиновидной шели пряжеулавливаюшего элемента. Проникнув в камеру между крышкой 21 и мембраной 22, он прогибает
мембрану, которая, сжимая пружину 24 с номошыо толкателя 23, разводит пластины 16, 17 пряжеулавлнваюшего элемента. Благодаря этому освобождается зажатый в последнем
конец оборванной после нрисучки пряжи, а через сопло 19 освобожденный конец выдувается нз пластин.
Все описанные процессы с исполпительнымн механизмами происходят одновременно во
всех устройствах группы, обслуживаемой одним пневматическнм приспособлением.
После прекращения подачи воздуха в магистраль 50 сети возврата и удаления конца нряжи грунна устройств и пневматическое приспособление, их обслуживающее, опять готовы к нрисучке пряжи.
Стравливание воздуха из задней нолости цилиндра во время подачи воздуха в переднюю полость п движения поршня 26 нроисходит
через сопло 19, при подаче воздуха в заднюю полость и движении поршня для этой цели служит зазор передней крышкой цилиндра и штоком 12.
Предмет изобретения
1.Устройство для автоматической присучки пряжи на прядильной машине, содержащее нряжеулавливаюший элемент с клиновидной щелью, механизм изменения сечения клиновидной шели и присучающий ролик, смонтированные на рычагах нснолнительного механизма с пневмоцилиндром и приводимые им в движение по сигналу пневматического датчика, срабатывающего нри обрыве пряжи, огличающееся тем, что, с целью повышения надежностн в работе и упрощения обслуживания, оно снабжено нневматическими приспособлеииями для приема сигналов пневматических датчиков одного или нескольких устройств и передачи этих сигналов на исполнительные механизмы и механизм изменения сеченпя клиновидной щели нряжеулавливаюшего элемента нри обрыве прялш, а таклсе передачи сигналов с поста управления машиной
при иаработке съема для отвода устройств из рабочей зоны машины.
2.Устройство по н. 1, отличающееся тем, что пневматическое приспособление для приема сигналов пневматических датчиков и передачи сигналов на исполнительные механизмы смонтировано на корнусе нневмоцилиндра исполнительного механизма.
3.Устройство но н. 1, отличающееся тем, что поворотный рычаг, несуший прпсучающий
ролик и пряжеулавливающий элемент, выполнен нодпрул иненным для возврата его в исходиое положение после присучки прялш.
4.Устройство но п. 1, отличающееся тем, что один конец гибкого элемента, слул ашего
для перемещения поворотного рычага, закреплен на штоке пневмоцилиндра исполнительного механизма.
5.Устройство но п. 1, отличающееся тем, что в нем использован пневматический датчик
2Фиг.З
fus,.4
1L
Ш
Т