Изобретение применяется в электроприводе, угловая частота вращения которого синхронизирована с частотой задающего источника.
Известен способ стабилизации скорости двигателя постоянного тока, состоящий в том, что управляющую обмотку двигателя питают от т-фазной сети переменного тока через управляемый выпрямитель, каждый выпрямительный элемент которого включают в момент времени, определяемый моментом поступления импульса частотного датчика скорости с последующим естественным отключением выпрямительного элемента после окончания полупериода проводимости.
Источником задающей частоты является сеть переменного тока, от которой питается управляемый выпрямитель.
В соответствии с известным способом продолжительность включения каждого выпрямительного элемента задают моментом прихода импульса частотного датчика скорости на протяжении полупериода проводимости, и это обусловливает необходимость использования в качестве управляющей обмотки двигателя его обмотки возбуждения: нри использовании обмотки якоря обратная связь по скорости становится положительной, что делает привод неработоспособным.
рования и улучщения динамических показателей электропривода путем пспользованпя в качестве управляющей обмотки якорной обмоткп двигателя. Это достигается тем, что в
момент прихода импульса в нерабочий полупериод, предшествующий перподу проводимости, начинают интегрирование стабильного стороннего сигнала, знак которого меняют в момент начала полупериода проводимост), а
сигнал на включение выпрямительного элемента подают в момент равенства нулю сигпала па выходе интегрирующего элемента, одновременно нрерывая процесс интегрирования вплоть до прихода следующего импульса в
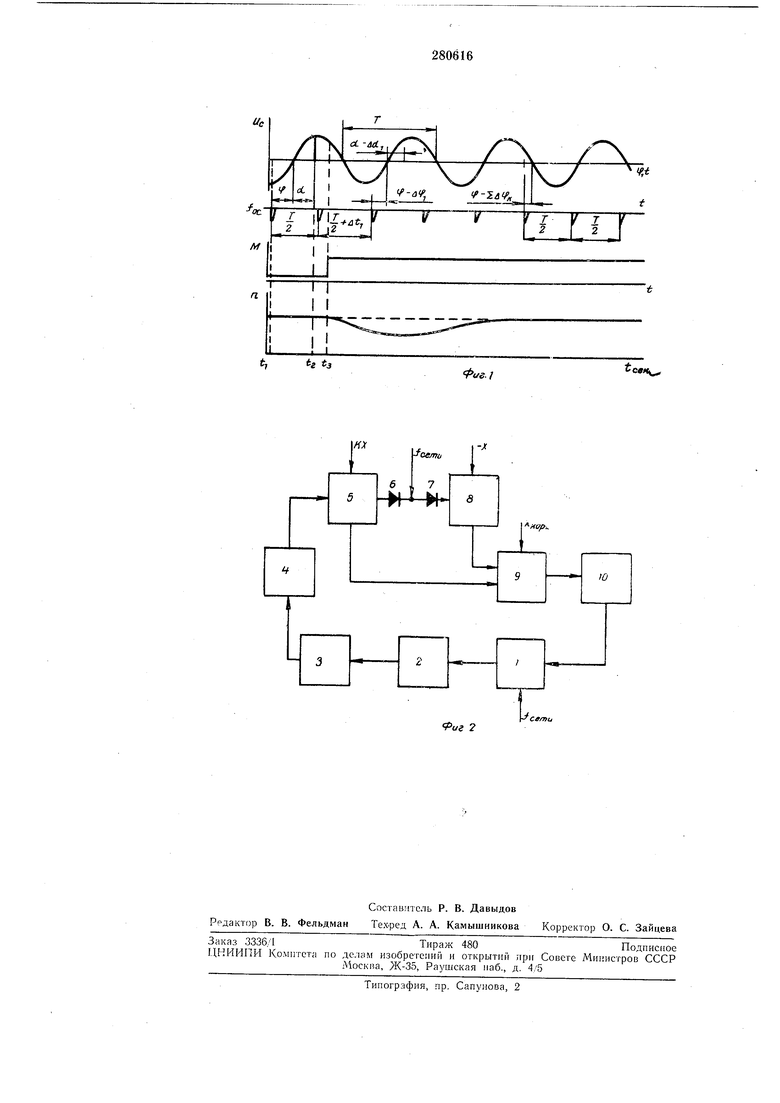
нерабочий иолупериод. Обеспечивается также корректировка системы стабилизации путем введения в систему сигнала обратной связи ио ускорению, для чего измеряют приращение угла сдвига между импульсом частотного датчика скорости и полуволной синусоиды пптающего напряжения за промежуток времени между двумя следующими один за другим им Пльсами, и сигнал, пропордпональный этому приращению, вводят в результат иптегрпрования. Кроме того, обеспечивается корректировка системы путем изменения коэффициента усиления, что достигается изменением отнощеппя уровней сигналов, подаваемых на вход ннтегрирующего элемента до и после наНа фиг. I приведены временные диаграммы, поясняюш,ие процесс управления одним из вып;pямнтev ьныx элементов управляемого вынрямптеля; на фиг. 2 - структурная схема одного из вариантов устройства, реализуюидего изобретение в части, относящейся к одному из выпрямительных элементов /п-фазиого управляемого выпрямителя. Выход управляемого выпрямительного тиристора I, в качестве которого используется, например, тиристор, подключен к обмотке якоря двигателя 2, на валу которого установлен частотный датчик 3 скорости. Выход датчика 3 соединен со входом регулируемого делителя 4 частоты, соединенного с первым вхо- 15 дом управления ключевого элемента «И 5, второй вход которого подключен через веитиль 6 к сети переменного тока, нитающей выпрямительный элемент /. К этой же сети через веитиль 7 подключеи вход управлеиия 20 ключевого элемента 8. На входы исполнительного звена ключевого элемента «И 5 и ключевого элемента 8 иоданы соответственно стороннне стабильные сигналы К.Х и -X. Входы иснолнительных звеньев этих ключевых эле- 25 ментов подключены ко входу интегрирующего элемента Я выход которого через формирователь 10 соединен со входом управления тиристора /. Ключевой элемент «И 5 выполнен с само- 30 блокировкой сигнала на нервом входе уиравления (от делителя 4). К иитегрирующему элементу может быть также подключен выход корректирующей цепи с сигналом . На временных диаграммах (см. фиг. 1) по- 35 казаны И -нанряжение сетн; /ос - иоследовательность импульсов частотного датчика скорости, частота импульсов обратной связи; М - момент на валу двигателя; п - скорость двигателя; ф - фазовый угол, на иротяжеиии 40 которого идет ннтегрироваиие сигнала Р(Х; а -фазовый угол, на иротяжении которого идет интегрирование сигнала X. Импульс частотного датчика 3 скорости, нришедщнй в нерабочий нолунернод в момент 45 времени i, на нервый вход уиравлення элемеита «И 5 обеспечивает совместно с сетевым сигналом, поданным на второй вход управления элемента «И 5, включение исполнительного звена этого элемента и подключение 50 на вход интегрирующего элемента стороннего стабильного снгиала /(А . В момент изменения полярности сетевого напряжения через, вентиль 7 будет включен ключевой элемент 8, при этом элемент «И 5 отключается, так как не- 55 чезает сигнал на его втором входе управления. На вход иитегрирующего элемеита 9 нодается сигиал X. При К. 1 сигнал на выходе интегрнрующего элемента 9 спадает до нуля в момент временн t, отмеченный на фиг. 1. Процесс интегрирования прерывается. В тот же момент с выхода интегрирующего элемеита через формирователь 10 иодается сигнал на вход унравлеиия тиристора 1, который 5 10 60 ющего нераоочего полунериода, с началом которого новторяется описаииый иикл. В установившемся режиме период следования имиульсов сигнала обратной связи, иснользуемых для уиравлеиия тиристорами, для которых полуперподы проводимости сдвинуты на 180°, равен длительности иолунериода Т иапряжеиия сети- . При работе двигателя на установившейся скорости рассматриваемый сиособ стабилизации обеснечнвает идеальио жесткие механические характеристики привода. Рассмотрим ироцесс стабилизации скорости при воздействии виешиего возмущеиия. При отсутствии возмундения угол ф, а следовательно, и угол а, остаются неизменными. Пусть в момент времени t (см. фиг. 1) произошел иаброс нагрузки, скорость двигателя начиет иадать, частота сигналов частотного датчика скорости (/ос) уменьшится; следующий импульс придет через промежуток времени на величину Д, больший, чем в период следования имиульсов в установивщемся режиме. В результате фазовый сдвиг уменьшится на величину Дф1. Угол задержки открытия тиристора уменьшится на величииу Даь определяемую измеиением фазового сдвига Дф1 и корректирующим сигиалом кор. что приведет к увеличению нанряжеиия на выходе тиристора /. Уменьшенне фазового сдвига и увеличение напряжения на выходе преобразователя происходит до тех иор, пока двигатель 2 точно не восстановит свою первоначальную скорость, при которой период следования импульсов обратной связи равен нолунериоду напряжения сетн. В результате наступает установившийся режим ирн иово.м зиачеиии угла фазового сдвига ф- -Ифк, меньшем первоначального, и, следовательио, большем напряжении на выходе тиристора /, причем приращение напряжения полиостью компеисирует рост нагрузки (ЕДфк - суммариое изменение фазового сдвига между импульсом сигнала обратной связи и началом следующего за ним полунериода нанряжения сети за время переходиого ироцесса). Аналогично можно показать, что увеличение скорости иод влиянием какого-либо воздействия (уменьшеиие нагрузки, увеличение нанряжения сети и т. д.) ведет к росту фазового сдвига до тех нор, нока двнгатель точно не восстановит свою скорость и не настуиит устаиовившнйся режим с новым, большим иервоначального углом фазового сдвига и, следовательно, при меиьшем наиряжении на выходе преобразователя. Импульс обратной связи, приходящий в те1енне рабочего для данного тиристора (например, положительного) полупериода нанряжения сети, используется онисаиным выше способом для управления теми тиристорами, для которых рабочим является следующий (отрицательный иолупериод напряжеиия сети. шример при однополупериодном выпрямле1И, то частота следования импульсов обрат)й связи в устаиовившемся режиме равна 1стоте сети. Изменение уставки уровня скорости осуествляется, иаиример, путем деления сигиаа датчика 3 делителем 4 частоты. Коэффициент усиления системы можно ме1ть изменением отношения уровней сигналов X и -X. При К, 1 угол ее ф. При К 1 Ф и коэффициент усилеиия больше, чем первом случае, так как то же самое измеиеle фазы сигнала обратной связи приводит к эльшему изменению угла к, а следовательно, наиряжения на выходе иреобразователя. В зависимости от коикретной схемной реа-1зации способа корректирующие сигналы огут быть введены либо на вход интегрирущего .элемента, либо суммироваться с сигзлом иа его выходе. Предлагаемый способ облегчает получение введение корректирующего сигнала по усзрению в контур регулирования без исполь)вания доиолнительных датчиков и без црезразования дискретного сигнала в аналого/ю форму. Изменение фазового сдвига относительно апрял ения сети каждого носледующего имульса датчика скорости но сравнению с фазвым сдвигом иредыдущего импульса (Дфк) тределяется средним приращением скорости вигателя за промежуток времени между двуя последующими имнульсами сигнала обатиой связи. А так как среднее изменение корости за какой-либо промежуток времени роиорционально среднему ускорению за тот :е промежуток времени, сигнал, проиорциоальный Дфк, может быть введен в систему егулирования в качестве корректирующего игиала по ускорению двигателя. Сигнал, пропорциональный Афк, может быть случен, например, с иомощью всномогателього интегрирующего элемента, аналогичного 45
нтегрирующему элементу, используемому в сновном контуре регулирования.
та до и иосле иачала полупериода нроводимости. Предмет изобретения 1. Способ стабилизации скорости двигателя постоянного тока, состоящий в том, что унравляющую обмотку двигателя питают от т-фазиой .сети переменного тока через нолуироводииковый управляемый выирямитель, вынрямительный элемент которого включают в момент времени, определяемый моментом поступления импульса частотного датчика скорости с последующим естественным отключением выпрямительного элемента носле окончания полуиериода ироводимости, отличающийся тем, что, с целью расщиреиия диаиазона регулироваиия и улучшения динамических показателей электропривода нутем исиользоваиия в качестве управляющей обмотки якорной обмотки двигателя, в момент ирихода импульса в нерабочий нолупериод, предшествующий полунериоду проводимости, начинают интегрирование стабильного стороииего сигнала, знак которого меняют в момент начала иолуиериода проводимости, а сигнал на включение выпрямительного элемента нодают в момеит равенства нулю сигнала на выходе интегрирующего элемента, одновременно ирерывая процесс интегрирования вплоть до прихода следующего импульса в нерабочий полунериод. 2. Способ по п. 1, отличающийся тем, что для корректировки системы стабилизации путем введения в систему сигнала обратной связи по ускорению измеряют приращение угла сдвига между импульсом частотного датчика скорости и полуволной синусоиды питающего напряжения за иромежуток времени между двумя следующими один за другим импульсами, и сигиал, иропорциональный этому приращению, вводят в результат интегриро40 вания. 3. Способ по п. 1, отличающийся тем, что для корректировки системы стабилизации путем изменения коэффициента усиления системы изменяют отиошение уровней сигналов, подаваемых на вход интегрирующего элеменt,Ьг t.
Cett,
fue.J
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления инвертором | 1984 |
|
SU1241380A1 |
| Следящий привод для компенсации ки-НЕМАТичЕСКиХ пОгРЕшНОСТЕй МЕХАНизМОВ | 1979 |
|
SU817959A1 |
| Способ управления непосредственным преобразователем частоты для регулируемого электропривода с широтно-импульсным регулированием (шир) выходного напряжения и непосредственный преобразователь частоты для регулируемого электропривода | 1978 |
|
SU858200A1 |
| Устройство для автоматического регулирования напряжения на электрофильтре | 1976 |
|
SU752274A1 |
| УСТРОЙСТВО ДЛЯ КОМПЕНСАЦИИ РЕАКТИВНОЙ МОЩНОСТИ | 2001 |
|
RU2212086C2 |
| Устройство для импульсно-фазового управления многофазным вентильным преобразователем | 1976 |
|
SU650198A1 |
| ТИРИСТОРНЫЙ СТАБИЛИЗАТОР ТОКА | 2003 |
|
RU2259627C2 |
| УСТРОЙСТВО ДЛЯ КОМПЕНСАЦИИ РЕАКТИВНОЙ МОЩНОСТИ | 2005 |
|
RU2310263C2 |
| УСТРОЙСТВО ДЛЯ КОМПЕНСАЦИИ РЕАКТИВНОЙ МОЩНОСТИ ЭЛЕКТРОПОДВИЖНОГО СОСТАВА | 2011 |
|
RU2467893C1 |
| ОДНОФАЗНЫЙ ВЫПРЯМИТЕЛЬ ДЛЯ ДУГОВОЙ СВАРКИ | 2010 |
|
RU2441734C1 |
.I -Л
JOemu
