(54) СЛЕДЯЩИЙ ПРИВОД ДЛЯ КОМПЕНСАЦИИ КИНЕМАТИЧЕСКИХ ПОГРЕШНОСТЕЙ МЕХАНИЗМОВ

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для регулирования технологических параметров | 1980 |
|
SU959046A1 |
| Следящий электропривод для разметки шкал | 1984 |
|
SU1228071A1 |
| Регулятор температуры | 1980 |
|
SU883880A1 |
| БЕСКОНТАКТНЫЙ ПОЗИЦИОННЫЙ ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1973 |
|
SU383191A1 |
| Вентильный электродвигатель | 1984 |
|
SU1257770A1 |
| Цифровое устройство для коммутации симистора | 1982 |
|
SU1039005A1 |
| УПРАВЛЯЕМЫЙ ФАЗОВРАЩАТЕЛЬ | 1971 |
|
SU299947A1 |
| Система автоматического управления | 1985 |
|
SU1409964A1 |
| Частотнорегулируемый асинхронный электропривод | 1981 |
|
SU1078568A2 |
| Преобразователь частоты | 1983 |
|
SU1173501A1 |
1
Изобретение относится к электротехнике и может быть использовано в системах автоматического управления, в частности при Коррекции кинематических погрешностей . металлорежущих станков.
Известен следящий электропривод, который может быть использован для,компенсации кинематической погрещности механинизма с исполнительным двигателем с двумя тахогенераторами 1.
Недостатком указанного устройства с тахогенераторами являются оборотные пульсации, не поддающиеся фильтрации при низких частотах. Оборотные пульсации приводят к вынужденным колебаниям тока якбря и вследствие этого снижению точности компенсации погрешности.
Наиболее близким к изобретению является следящий электропривод для компенсаций кинематической погрешности механизма, содержащий электродвигатель, якорная обмотка которого подключена к источнику переменного тока через коммутатор, канал, широтно-импульсного управления, включающий последовательно соединенные с датчиком положения инструмента фазочувствительный усилитель, ко второму входу которого подключен выход датчика положения детали, выпрямитель, сумматор, ко втоpojviy входу которого подключен синхронный генератор, выход сумматора через трехвходовую схему ИЛИ подключен к единичному входу триггера-формирователя, нулевой вход которого связан с выходом датчика положения инструмента, а выход - с коммутатором, канал реверса, включающий триггер реверса и управляемые ключи 2.
Недостатком этого электропривода является низкое качество регулирования в динамических режимах отработки рассогласований, что также снижает точность компенсации погрещности. Это объясняется тем, что в указанном приводе в канале реверса имеет место реакция на переменную составляющую ошибки рассогласования без регулирования фазы реверса, что обуславливает недостаточную «гибкость схемы регулирования.
Цель изобретения повышение точности.
Указанная цель достигается тем, что в следящем электроприводе для компенсации кинематических погрешностей механизмов, содержащем электродвигатель, якорная обмотка которого подключена к источнику переменного тока через коммутатор, канал широтно-импульсного управления, включающий последовательно соединенные с датчиком положения инструмента фазочувствительный усилитель, ко второму входу которого подключен выход датчика положения детали, выпрямитель, сумматор, ко второму входу которого подключен синхронный генератор, выход сумматора через 3-х входовую схему ИЛИ подключен к единичному входу триггера-формирователя, нулевой вход которого связан с выходом датчика положения инструмента, а выход - с коммутатором, канал реверса, содержащий триггер реверса и управляемые ключи, коммутатор содержит два встречно-параллельно включенных в цепь якоря тиристора, два управляемых ключа и триггер RS-типа, причем управляющие электроды тиристоров через ключи связаны с выходом триггера-формирователя канала широтно-импульсного управления, а управляющие входы ключей соединены с выходами триггера RS-типа, в канал реверса введены дополнительно интегрирующее звено, генератор пилообразного напряжения и инвертор, Причем первый вход генератора через первый управляемый ключ, а также через второй управляемый ключ и инвертор.соединен с,выходом фазочувствительного усилителя канала широтно-импульсного управления, к которому подсоединен также вход триггера реверса, второй вход генератора через интегрирующее звено подключен к выходу выпрямителя, выход генератора через первый и второй ключи реверса подключен ко второму и третьему входамсхемы ИЛИ и к первой паре входов триггера RS-типа, выходы триггера реверса связаны с управляющими входами первых и вторых ключей, а также со второй парой входов триггера RS-типа.
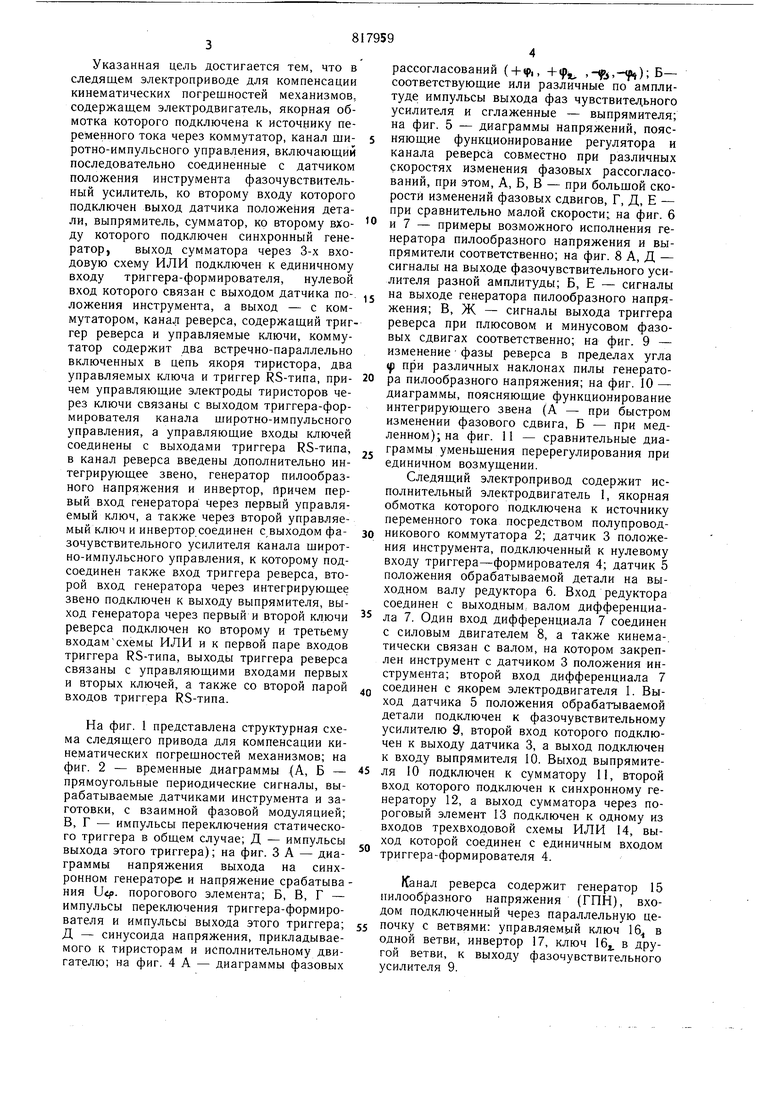
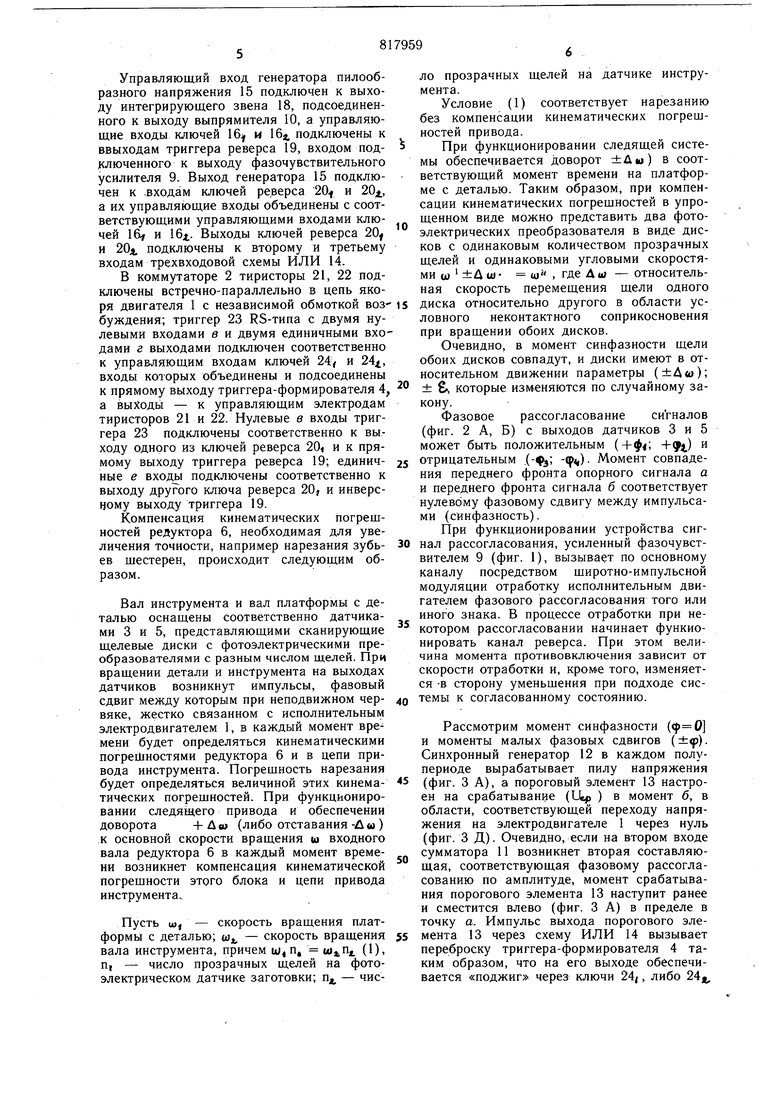
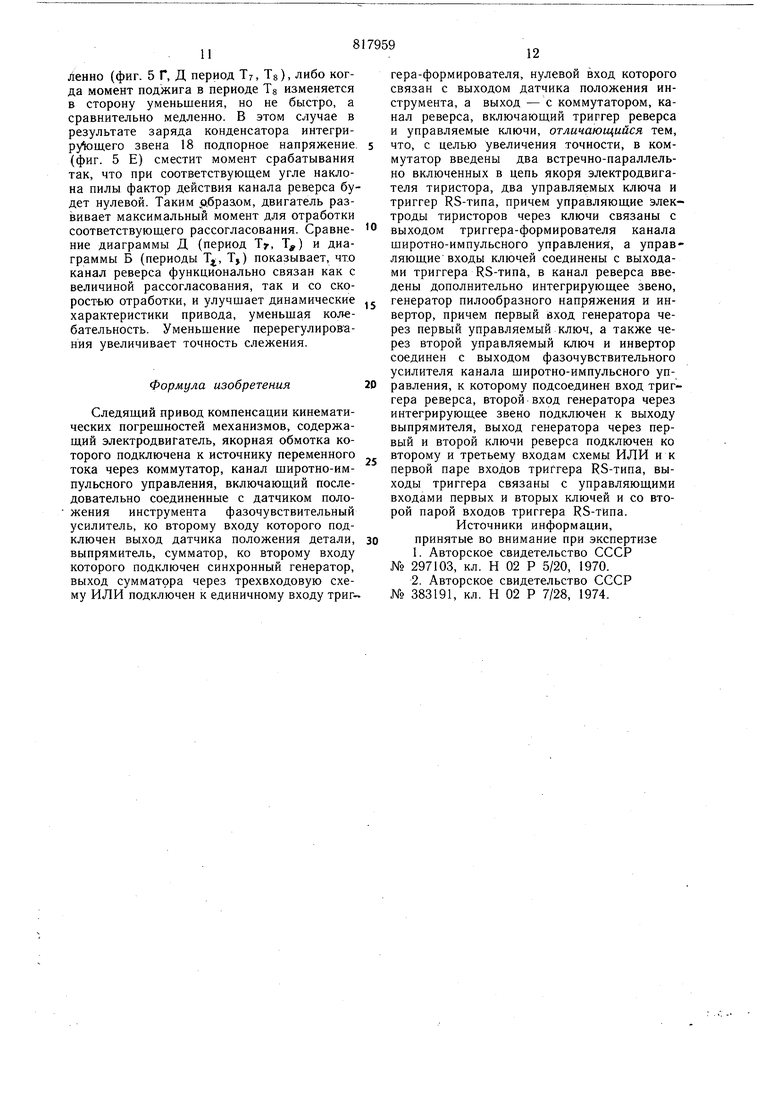
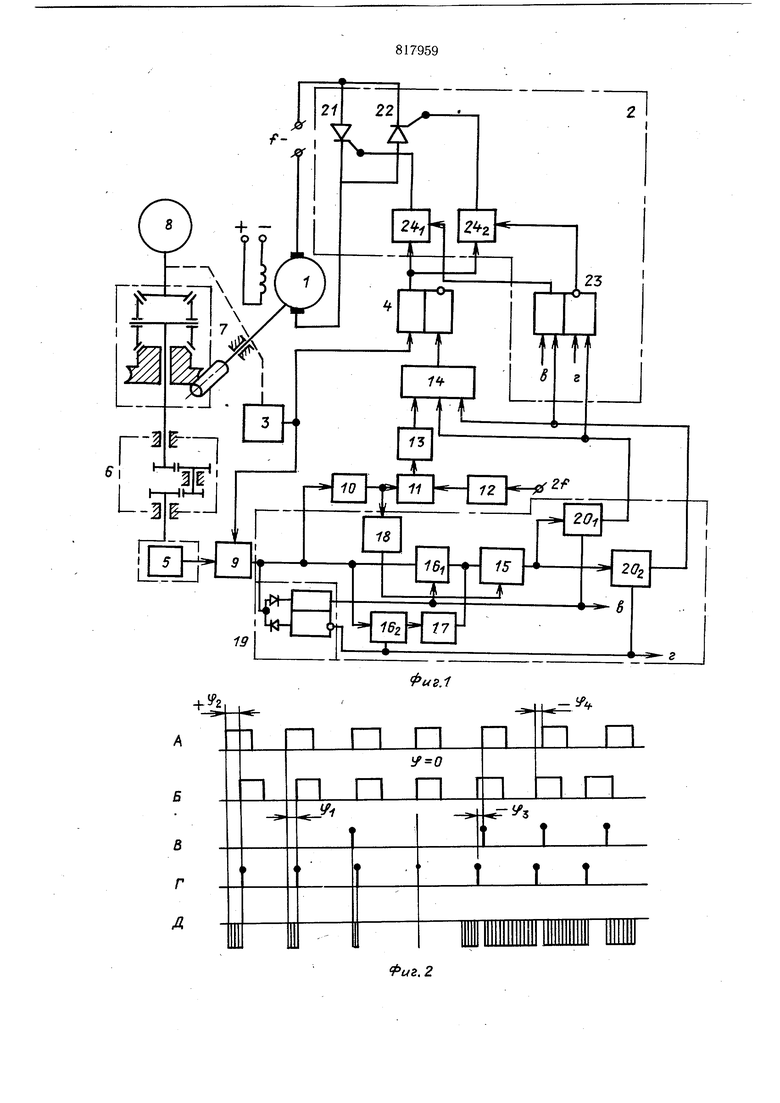
На фиг. 1 представлена структурная схема следящего привода для компенсации кинематических погрещностей механизмов; на фиг. 2 - временные диаграммы (А, Б - прямоугольные периодические сигналы, вырабатываемые датчиками инструмента и заготовки, с взаимной фазовой модуляцией; В, Г - импульсы переключения статического триггера в общем случае; Д - импульсы выхода этого триггера); на фиг. ЗА - диаграммы напряжения выхода на синхронном генераторе и напряжение срабатыва ния и. порогового элемента; Б, В, Г - импульсы переключения триггера-формирователя и импульсы выхода этого триггера; Д - синусоида напряжения, прикладываемого к тиристорам и исполнительному двигателю; на фиг. 4 А - диаграммы фазовых
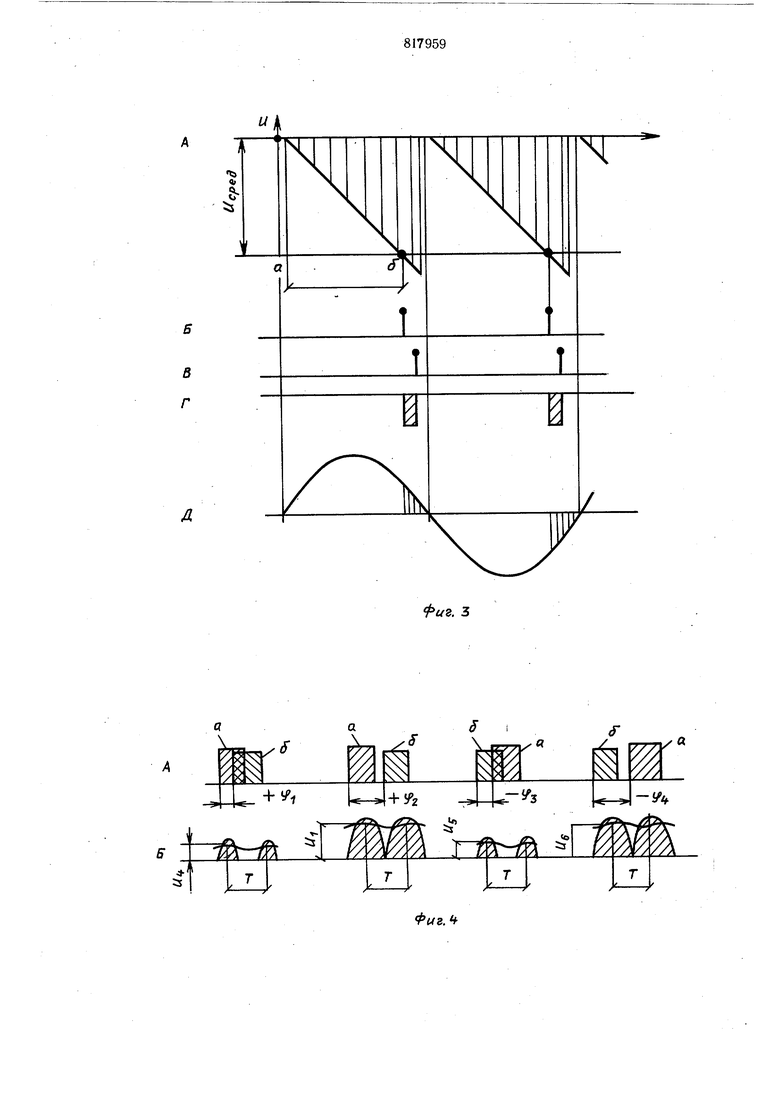
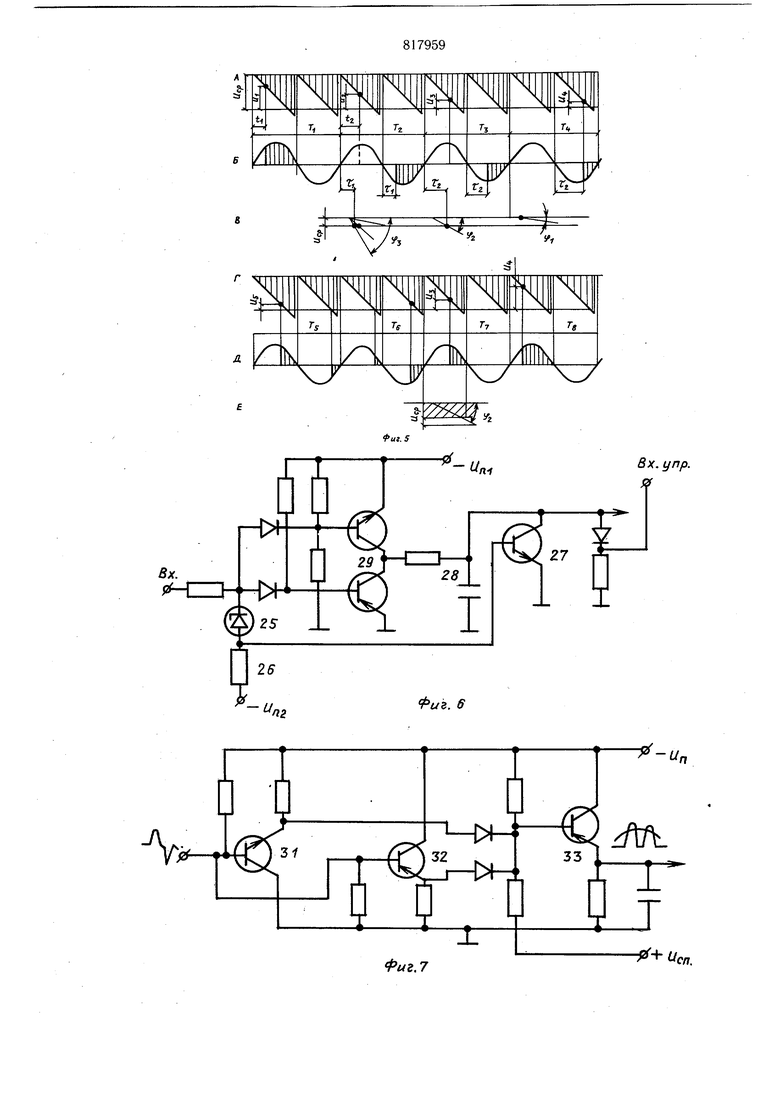
рассогласований ( + ф|, +fi ,-%,-«р);Б- соответствующие или различные по амплитуде импульсы выхода фаз чувствитедьного усилителя и сглаженные - выпрямителя; на фиг. 5 - диаграммы напряжений, поясняющие функционирование регулятора и канала реверса совместно при различных скоростях изменения фазовых рассогласований, при этом. А, Б, В - при большой скорости изменений фазовых сдвигов. Г, Д, Е - при сравнительно малой скорости; на фиг. 6
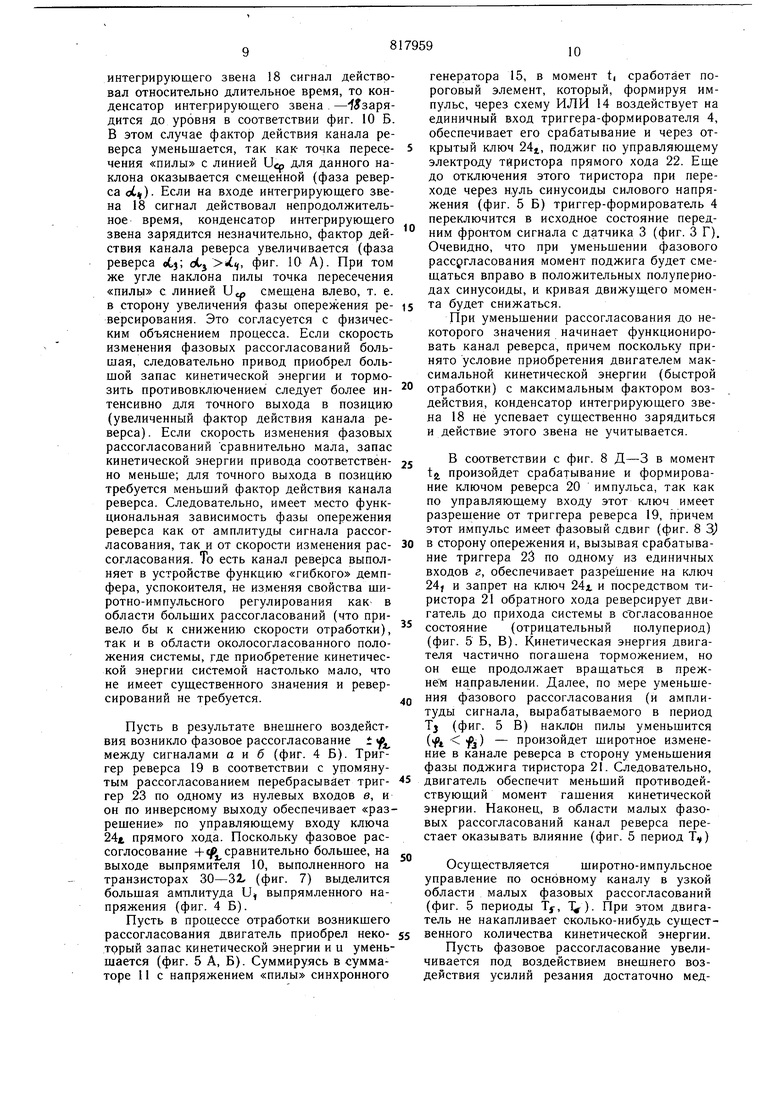
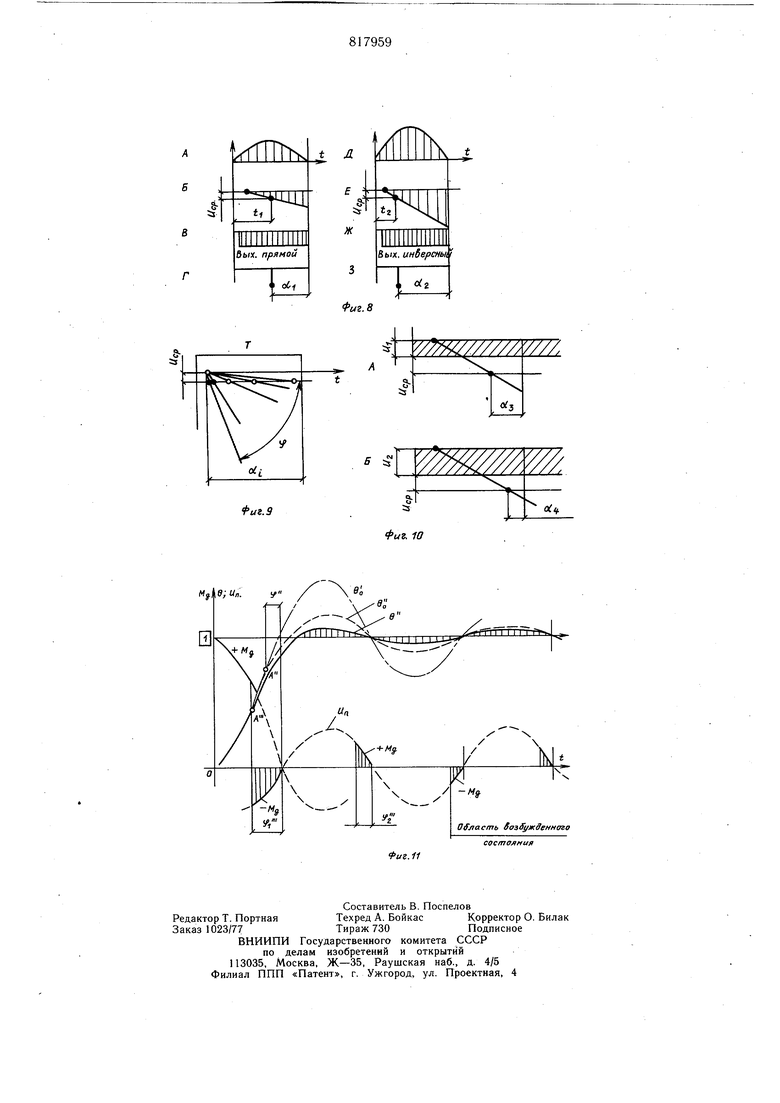
и 7 - примеры возможного исполнения генератора пилообразного напряжения и выпрямители соответственно; на фиг. 8 А, Д - сигналы на выходе фазочувствительного усилителя разной амплитуды; Б, Е - сигналы
на выходе генератора пилообразного напряжения; В, Ж - сигналы выхода триггера реверса при плюсовом и минусовом фазовых сдвигах соответственно; на фиг. 9 - изменение фазы реверса в пределах угла f при различных наклонах пилы генератора пилообразного напряжения; на фиг. 10 - диаграммы, поясняющие функционирование интегрирующего звена (А - при быстром изменении фазового сдвига, Б - при медленном); на фиг. 11 - сравнительные диаграммы уменьшения перерегулирования при единичном возмущении.
Следящий электропривод содержит исполнительный электродвигатель 1, якорная обмотка которого подключена к источнику переменного тока посредством полупроводникового коммутатора 2; датчик 3 положения инструмента, подключенный к нулевому входу триггера-формирователя 4; датчик 5 положения обрабатываемой детали на выходном валу редуктора 6. Вход редуктора соединен с выходным, валом дифференциала 7. Один вход дифференциала 7 соединен с силовым двигателем 8, а также кинема-, тически связан с валом, на котором закреплен инструмент с датчиком 3 положения инструмента; второй вход дифференциала 7
соединен с якорем электродвигателя 1. Выход датчика 5 положения обрабатываемой детали подключен к фазочувствительному усилителю 9, второй вход которого подключен к выходу датчика 3, а выход подключен к входу выпрямителя 10. Выход выпрямителя 10 подключен к сумматору 11, второй вход которого подключен к синхронному генератору 12, а выход сумматора через пороговый элемент 13 подключен к одному из входов трехвходовой схемы ИЛИ 14, выход которой соединен с единичным входом
триггера-формирователя 4.
Канал реверса содержит генератор 15 пилообразного напряжения (ГПН), входом подключенный через параллельную цепочку с ветвями: управляем.ый ключ 16., в одной ветви, инвертор 17, ключ 16. в другой ветви, к выходу фазочувствительного усилителя 9. Управляющий вход генератора пилообразного напряжения 15 подключен к выходу интегрирующего звена 18, подсоединенного к выходу выпрямителя 10, а управляющие входы ключей 16 и 16j{. подключены к ввыходам триггера реверса 19, входом под1ключенного к выходу фазочувствительного усилителя 9. Выход генератора 15 подключен к .входам ключей реверса 20 и 20, а их управляющие входы объединены с соответствующими управляющими входами ключей 16f и 16. Выходы ключей реверса 20 и 20jt, подключены к второму и третьему входам трехвходовой схемы ИЛИ 14. В коммутаторе 2 тиристоры 21, 22 подключены встречно-параллельно в цепь якоря двигателя 1 с независимой обмоткой воз буждения; триггер 23 RS-типа с двумя нулевыми входами в и двумя единичными вхо дами г выходами подключен соответственно к управляющим входам ключей 24у и 24, входы которых объединены и подсоединены к прямому выходу триггера-формирователя 4, а выходы - к управляющим электродам тиристоров 21 и 22. Нулевые в входы триггера 23 подключены соответственно к выходу одного из ключей реверса 20 и к прямому выходу триггера реверса 19; единичные е входы подключены соответственно к выходу друРого ключа реверса 20 и инверсцому выходу триггера 19. Компенсация кинематических погрещностей редуктора 6, необходимая для увеличения точности, например нарезания зубьев шестерен, происходит следующим образом. Вал инструмента и вал платформы с деталью оснащены соответственно датчиками 3 и 5, представляющими сканирующие щелевые диски с фотоэлектрическими преобразователями с разным числом щелей. При вращении детали и инструмента на выходах датчиков возникнут импульсы, фазовый сдвиг между которым при неподвижном червяке, жестко связанном с исполнительным электродвигателем 1, в каждый момент времени будет определяться кинематическими погрешностями редуктора бив цепи привода инструмента. Погрещность нарезания будет определяться величиной этих кинематических погрешностей. При функционировании следящего привода и обеспечении доворота-ЬДо (либо отставания-Д« ) к основной скорости вращения и входного вала редуктора 6 в каждый момент времени возникнет компенсация кинематической погрещности этого блока и цепи привода инструмента.. Пусть Ш| - скорость вращения платформы с деталью; и,, - скорость вращения вала инструмента, причем («п, , (1), П| - число прозрачных щелей на фотоэлектрическом датчике заготовки; п - число прозрачных щелей на датчике инструмента. Условие (1) соответствует нарезанию без компенсации кинематических погрешностей привода. При функционировании следящей системы обеспечивается доворот ±Дм) в соответствующий момент времени на платформе с деталью. Таким образом, при компенсации кинематических погрещностей в упрощенном виде можно представить два фотоэлектрических преобразователя в виде дисков с одинаковым количеством прозрачных щелей и одинаковыми угловыми скоростями ш ±Д ш- la , где Д ш - относительная скорость перемещения щели одного диска относительно другого в области условного неконтактного соприкосновения при вращении обоих дисков. Очевидно, в момент синфазности щели обоих дисков совпадут, и диски имеют в относительном движении параметры (±Д(с)); ± fc, которые изменяются по случайному закону. Фазовое рассогласование сигналов (фиг. 2 А, Б) с выходов датчиков 3 и 5 может быть положительным ( +9t) отрицательным .(- )- Момент совпадения переднего фронта опорного сигнала а и переднего фронта сигнала б соответствует нулевому фазовому сдвигу между импульсами (синфазность). При функционировании устройства сигнал рассогласования, усиленный фазочувствителем 9 (фиг. 1), вызывает по основному каналу посредством щиротно-импульсной модуляции отработку исполнительным двигателем фазового рассогласования того или иного знака. В процессе отработки при некотором рассогласовании начинает функионировать канал реверса. При этом величина момента противовключения зависит от скорости отработки и, кроме того, изменяется -в сторону уменьшения при подходе системы к согласованному состоянию. Рассмотрим момент синфазности ( и моменты малых фазовых сдвигов (). Синхронный генератор 12 в каждом полупериоде вырабатывает пилу напряжения (фиг. 3 А), а пороговый элемент 13 настроен на срабатывание (Ltp ) в момент б, в области, соответствующей переходу напряжения на электродвигателе 1 через нуль (фиг. 3 Д). Очевидно, если на втором входе сумматора 11 возникнет вторая составляющая, соответствующая фазовому рассогласованию по амплитуде, момент срабатывания порогового элемента 13 наступит ранее и сместится влево (фиг. 3 А) в пределе в точку а. Импульс выхода порогового элемента 13 через схему ИЛИ 14 вызывает переброску триггера-формирователя 4 таким образом, что на его выходе обеспечивается «поджиг через ключи 24,, либо 24, коммутатора 2 (в соответствии со знаком фазового рассогласования) тиристора 21 либо тиристора 22. Обратная же переброска триггера-формирователя 4 осуществляется задним фроном сигнала с датчика 3 (фиг. 1; фиг. 2 А; фиг. 3 В, Г). Таким образом, сиимается сигнал «поджига с управляющего электрода тиристора до его естественного гащения, когда синусоида его анодного напряжения проходит через нуль (фиг. 3 Д). Так, в синфазном состоянии поддерживается возбужденное состояние (реверсирование) электродвигателя 1 в соответствии с переменным напряжением, а в области околосинфазной - «прецезионное слежение за фазовым рассогласованием с относительно малым крутящим моментом. Канал реверса при этом не функционирует. Фазочувствительный усилитель 9 мостикового типа обеспечивает получение сигнала, знак которого и амплитуда находятся в соответствии со знаком и величиной фазового рассогласования, триггер реверса 19 ерабатывает, обеспечивая соответствующее состояние триггера 23 и, следовательно, «разрешение через ключи 24, и 24. на «поджиг либо тиристора 21 либо тиристора 22 в полупериодах питающего напряжения, Выпрямитель 10 обеспечивает получение выпрямленного сигнала (фиг. 4 А, Б). Получение положительных импульсов необходимо для обеспечения щиротного смещения момента срабатывания порогового элемен та 13 (фиг. 3 А и фиг. 5 А) за счет суммирования в сумматоре 11 напряжения пилы с выхода синхронного генератора 12 и напряжения с выхода выпрямителя. На вход генератора 15 (фиг. 6) поступают через управляемый ключ 16з положительные импульсы и через управляемый ключ 16t и инвертор 17 инвертированные отрицательные импульсы. Если импульс на аходе генератора амплитудой превосходит напряжение стабилизации стлбилитрона 25 (фиг. 6), он пробивается, на резисторе 26 -выделяется положительное напряжение, открывающее транзистор 27, щунтирующий конееденсатор 28, т. е. генератор не функционирует. При снижении амплитуды импульса ниже напряжения пробоя стабилитрона 25 транзистор 27 закрывается, закрывается также транзистор 29, обеспечивающий образование «пилы на конденсаторе 28. Наклон «пилы определится внутренним сопротивлением транзистора 29, рабочая точка которого находится в линейной области и изменяется в соответствии с амплитудой входного импульса. В области больщих амплитуд сигнала (фиг. 9 наклон пилы соответствует tgy щлх. и горизонтальные перемещения точки пересечения «пилы с линией, соответствующей Ue порогового элемента 13 (фиг. 9) незначительны. Только при достаточно малых рассогласованиях угол фазы опережения в канале реверса уменьщается существенно и в некоторой области малых фазовых рассогласований фактор влияния канала реверса нулевой. При больщих рассогласованиях за пределом области у,пА. «пила не вырабатывается, и фактор влияние канала реверса также нулевой. Из фиг. 8 (где на кривых А, Д - импульсы разной амплитуды на входе генератора 15) видно, что при соответствующих «разрещениях на выходах триггера реверсд 19 (фиг. 8 В, Ж) вследствие изменяющегося наклона «пилы генератора момент противовключения электродвигателя 1 при подходе к установивщемуся состоянию изменяется (л.,, «С). Область изменении от об/иа ДО тй определяется углом (фиг. 9) и соответствует некоторой области амплитуд импульсов на выходе фазочувствительного усилителя 9, т. е. при больщих рассогласованиях канал реверса не функционирует, так как это сказалось бы на скорости отработки рассогласования, а также не функционирует в области весьма малых фазовых рассогласований, что увеличило бы колебательность. Таким образом, осуществляется гибкое демпфирование следящей системы. Па фиг. 11 изображена реакция следящей системы на единичное возмущающее воздействие, а также дается сравнение со случаями отсутствия канала реверса (ощибка ), реверсирования с помощью дифференцирующего звена в канале реверса (ощибка бд ). Из фиг. 11 видно, что реверсирование двигателя из области положительного момента - М происходит ранее (А ), и система приходит к согласованному состоянию с меньщим перерегулированием. Этому способствует изменяющаяся фаза реверсирования ( f----tn) дальнейщем система поддерживается в возбужденном состоянии, но уже без действия канала реверса. В области малых фазовых рассогласований осуществляется прецезионное щиротно-импульсное управление, которое характеризуется тем, что «дрожание якоря двигателя в синфазном положении переходит в увеличивающиеся по амплитуде повороты в ту или иную сторону в соответствии с возникающим рассогласованием. При увеличении момента нагрузки, что имеет место в процессе резки заготовки, начинает функционировать канал реверса. При этом, чем больще рассогласование, тем больщий крутящий момент развивает исполнительный двигатель. Зависимость момента противовключения на реверс от скорости отработки приведена на фиг. 10 А, Б. Интегрирующее звено 18 создает на управляющем входе генератора 15 подпорный сигнал по закону интеграла от сигнала на выходе выпрямителя (заштрихованный на фиг. 4). Если на входе интегрирующего звена 18 сигнал действовал относительно длительное время, то конденсатор интегрирующего звена -f sapHдится до уровня в соответствии фиг. 10 Б. В этом случае фактор действия канала реверса уменьшается, так как- точка пересечения «пилы с линией Ucp для данного наклона оказывается смещенной (фаза реверса di,). Если на входе интегрирующего звена 18 сигнал действовал непродолжительное время, конденсатор интегрирующего звена зарядится незначительно, фактор действия канала реверса увеличивается (фаза реверса oCj; dtj /, фиг. 10 А). При том же угле наклона пилы точка пересечения «пилы с линией смепдена влево, т. е. в сторону увеличения фазы опережения реверсирования. Это согласуется с физическим объяснением процесса. Если скорость изменения фазовых рассогласований больщая, следовательно привод приобрел больщой запас кинетической энергии и тормозить противовключением следует более интенсивно для точного выхода в позицию (увеличенный фактор действия канала реверса). Если скорость изменения фазовых рассогласований сравнительно мала, запас кинетической энергии привода соответственно меньще; для точного выхода в позицию требуется меньщий фактор действия канала реверса. Следовательно, имеет место функциональная зависимость фазы опережения реверса как от амплитуды сигнала рассогласования, так и от скорости изменения рассогласования. То есть канал реверса выполняет в устройстве функцию «гибкого демпфера, успокоителя, не изменяя свойства щиротно-импульсного регулирования как- в области больших рассогласований (что привело бы к снижению скорости отработки), так и в области околосогласованного положения системы, где приобретение кинетической энергии системой настолько мало, что не имеет существенного значения и реверсирований не требуется. Пусть в результате внешнего воздействия возникло фазовое рассогласование i между сигналами а и б (фиг. 4 Б). Триггер реверса 19 в соответствии с упомянутым рассогласованием перебрасывает триггер 23 по одному из нулевых входов в, и он по инверсному выходу обеспечивает «разрешение по управляющему входу ключа 24е прямого хода. Поскольку фазовое рассоглосование -f сравнительно большее, на выходе выпрямителя 10, выполненного на транзисторах 30-32- (фиг. 7) выделится больщая амплитуда U выпрямленного напряжения (фиг. 4 Б). Пусть в процессе отработки возникшего рассогласования двигатель приобрел некоторый запас кинетической энергии и и уменьшается (фиг. 5 А, Б). Суммируясь в сумматоре 11 с напряжением «пилы синхронного генератора 15, в момент ti сработает пороговый элемент, который, формируя импульс, через схему ИЛИ 14 воздействует на единичный вход триггера-формирователя 4, обеспечивает его срабатывание и через открытый ключ 24t, поджиг по управляющему электроду Тиристора прямого хода 22. Еще до отключения этого тиристора при переходе через нуль синусоиды силового напряжения (фиг. 5 Б) триггер-формирователь 4 переключится в исходное состояние передним фронтом сигнала с датчика 3 (фиг. 3 Г). Очевидно, что при уменьшении фазового рассогласования момент поджига будет смещаться вправо в положительных полупериодах синусоиды, и кривая движущего момента будет снижаться. При уменьщении рассогласования до некоторого значения начинает функционировать канал реверса, причем поскольку принято условие приобретения двигателем максимальной кинетической энергии (быстрой отработки) с максимальным фактором воздействия, конденсатор интегрирующего звена 18 не успевает существенно зарядиться и действие этого звена не учитывается. В соответствии с фиг. 8 Д-3 в момент tji произойдет срабатывание и формирование ключом реверса 20 импульса, так как по управляющему входу этот ключ имеет разрешение от триггера реверса 19, причем этот импульс имеет фазовый сдвиг (фиг. 8 3) в сторону опережения и, вызывая срабатывание триггера 23 по одному из единичных входов г, обеспечивает разрешение на ключ 24f и запрет на ключ 24i и посредством тиристора 21 обратного хода реверсирует двигатель до прихода системы в с1)гласованное состояние (отрицательный полупериод) (фиг. 5 Б, В). Кинетическая энергия двигателя частично погащена торможением, но он еще продолжает вращаться в прежнем направлении. Далее, по мере уменьщения фазового рассогласования (и амплитуды сигнала, вырабатываемого в период Тз (фиг. 5 В) наклон пилы уменьщится ( fj) - произойдет широтное изменение в канале реверса в сторону уменьшения фазы поджига тиристора 21. Следовательно, двигатель обеспечит меньший противодействующий момент гашения кинетической энергии. Наконец, в области малых фазовых рассогласований канал реверса перестает оказывать влияние (фиг. 5 период Т) Осуществляется широтно-импульсное управление по основному каналу в узкой области малых фазовых рассогласований (фиг. 5 периоды Tf, Т). При этом двигатель не накапливает сколько-нибудь существенного количества кинетической энергии. Пусть фазовое рассогласование увеличивается под воздействием внещнего воздействия усилий резания достаточно медЛенно (фиг. 5 Г, Д период Т, TS), либо когда момент поджига в периоде Те изменяется в сторону уменьшения, но не быстро, а сравнительно медленно. В этом случае в результате заряда конденсатора интегрирующего звена 18 подпорное напряжение, (фиг. 5 Е) сместит момент срабатывания так, что при соответствующем угле наклона пилы фактор действия канала реверса будет нулевой. Таким «).брааом, двигатель развивает максимальный момент для отработки соответствующего рассогласования. Сравнение диаграммы Д (период Ту, Т) и диаграммы Б (периоды Tj, Т,) показывает, что канал реверса функционально связан как с величиной рассогласования, так и со скоростью отработки, и улучшает динамические характеристики привода, уменьщая колебательность. Уменьшение перерегулирования увеличивает точность слежения. Формула изобретения Следящий привод компенсации кинематических погрещностей механизмов, содержащий электродвигатель, якорная обмотка которого подключена к источнику переменного тока через коммутатор, канал широтно-импульсного управления, включающий последовательно соединенные с датчиком положения инструмента фазочувствительный усилитель, ко второму входу которого подключен выход датчика положения детали, выпрямитель, сумматор, ко второму входу которого подключен синхронный генератор, выход сумматора через трехвходовую схему ИЛИ подключен к единичному входу триггера-формирователя, нулевой вход которого связан с выходом датчика положения инструмента, а выход - с коммутатором, канал реверса, включающий триггер реверса и управляемые ключи, отличающийся тем, что, с целью увеличения точности, в коммутатор введены два встречно-нараллельно включенных в цепь якоря электродвигателя тиристора, два управляемых ключа и триггер RS-типа, причем управляющие электроды тиристоров через ключи связаны с выходом триггера-формирователя канала широтно-импульсного управления, а управляющие входы ключей соединены с выходами триггера RS-типа, в канал реверса введены дополнительно интегрирующее звено, генератор пилообразного напряжения и инвертор, причем первый вход генератора через первый управляемый ключ, а также через второй управляемый ключ и инвертор соединен с выходом фазочувствительного усилителя канала щиротно-импульсного управления, к которому подсоединен вход триггера реверса, второй вход генератора через интегрирующее звено подключен к выходу выпрямителя, выход генератора через первый и второй ключи реверса подключен ко второму и третьему входам схемы ИЛИ и к первой паре входов триггера RS-типа, выходы триггера связаны с управляющими входами первых и вторых ключей и со второй парой входов триггера RS-типа. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 297103, кл. Н 02 Р 5/20, 1970. 2.Авторское свидетельство СССР № 383191, кл. Н 02 Р 7/28, 1974.
В Г А
«г. 2
W
В Г
Л
Фиг. 3
/ш
/г
V7
л
V
vr
Фиг. Фиг.7 6 . (Jen.
