Известны кормораздатчики, содержащие .раму, бункер, транспортер, битер, ходовые колеса и тросовый привод. Однако такие кормораздатчики не обеспечивают его манввремяости пря повороте.
Предлагаемый кормораздатчик отличается тем, что на осях .колес закреплены ограничители поворота с рычагами, связанными между собой .гибким звеном и соеди невнымИ через поводок с тяговым тросом привода, Имеющего на пути движения троса в местах поворота кормораздатчика блоки, на1правляющие ПовоД01К в Сторону тюворота.
Это позволит осуществить маневренность кормораздатчИка.
Кроме того, ограннчители поворота колес могут быть выполнены :в виде жестко связанных с рыча-гами пластин, входящих в гнезда, установленные на раме.
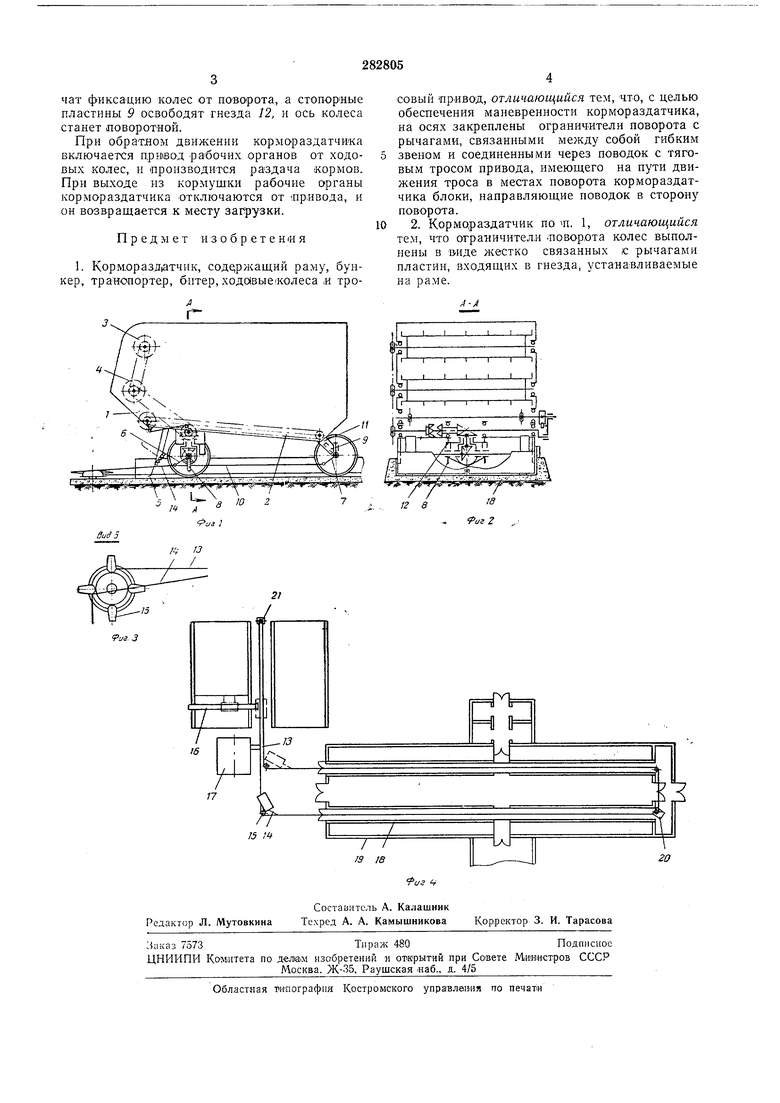
На фиг. 1 «зо&ражан 1Предла1гаемый мармор1аедатч1ик, вид lodoiKiy; «а фиг. 2 - то же, разрез то 1на фиг. 1; я а фи1Г. 3 - шо же, |ВИ:Д по 011релке Б; яа фиг. 4 - схема цр.анюпортирования кормов. Кор MQP аз датчик состоит из бункера ./ с подвижным дном, выполненным в виде |Цепочна-лланчатого транспортера 2; двух кормовыдающих битеров 3 л 4, скребка 5, рычагов 6 и 7, жестко соединенных со стопорными пластинами 8, 9 и авязанных в местах йо единения с осью колеса, троса W, соединяющего рычаги.,, гнезд // и /2 тягового троса 13 с 1ПОВОДКОМ 14, соединяющимся с тросом JO скользящим зажимом. На поворотах тягового троса уста1МОвле1ны лопатчатые 15.
Движение кормораздатчика от сило.со.хранилища 16 или .кормоцеха 17 к сдвоенным кормущкам 18 помещения скота 19 произ-воднтся с .помощью тягового троса, реверсив-HOii лебедки 20 и натяжного устройства 21.
При перемещении тягового троса с прикрен -ленным к нему .корлгораздатчиком на повороте узел соединения поводка 14 с тяговым тросом 13 встречается- с лопатчатым блоком 1о.Одна 1ИЗ его лопаток входит тяговым TpocoiM и ПОВОДКОМ, перебрасывая последний через блок,, а трое остается в канавке блока. Следуя за изменившимся движением троса,, кор.мораздатчшс р азйернется по кривой, остав-ляя сбоку донатчатый блок, войдет в сдвоенную кормуйлку 18. При движении кормораз-датчика по адармушке скребок 5 будет выгре-бать оставшийся .кор.м.
После выгребания оста вшегося корма из кормушки кормораздатч иК при помощи реверсивной лебедки, изменяющей движение тягового троса, будет двигаться в обратном направлении. При этом скользящий зажим По.водка перейестится к другой оси колес, пов-ер-нет рыч.агн передней и задней осей, стопор ые пластины 8 зайдут в гнезда // и обеспе-чат фиксацию колес от поворота, а стопорные пластины 9 освободят гнезда 12, и ось колеса станет ловоротной.
При обратном движении кормораздатчика включается привод рабочих органов от ходовых колес, и производится раздача кормов. При выходе из кормушки рабочие органы кормораздатчика отключаются от .привода, и он возвращается .к месту загрузки.
Предмет изобретения
1. Корм.ораздйтчик, соде,ржащий раму, бункер, травопортер, битер, ходо1вые колеса и тросовый привод, отличающийся тем, что, с целью обеспечения маневренности кормораздатчика, на осях закреплены ограничители поворота с рычагами, связанными между собой гибким
звеном и соединенными через поводок с тяговым тросом привода, имеющего на пути движения троса в местах поворота кормораздатчика блоки, направляющие поводок в сторону поворота.
2. Кормораздатчик по П. 1, отличающийся тем, что ограничители .поворота колес выполнены в виде жестко связанных с рычагами пластин, входящих в гнезда, устанавливаемые на раме.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОРМОРАЗДАТЧИК | 2009 |
|
RU2399199C1 |
| Кормораздатчик | 1982 |
|
SU1093306A1 |
| Кормораздатчик | 1960 |
|
SU131579A1 |
| Кормораздатчик-дозатор для животноводческих помещений | 1989 |
|
SU1660643A1 |
| Координатный кормораздатчик | 1982 |
|
SU1130287A1 |
| Устройство для выгрузки корма | 1990 |
|
SU1794439A1 |
| Кормораздатчик | 1982 |
|
SU1147304A1 |
| Кормораздатчик | 1984 |
|
SU1259984A1 |
| Кормораздатчик | 1986 |
|
SU1360668A2 |
| Кормораздатчик | 1985 |
|
SU1308289A1 |
